设计简介
二维跟踪太阳光伏发电装置设计
摘 要
人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,但是太阳能又存在着低密度、间歇性、空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高。太阳光线跟踪装置解决了太阳能利用率不高的问题。本文对太阳能跟踪系统进行了机械设计和跟踪系统控制部分设计。
第一,机械部分设计:
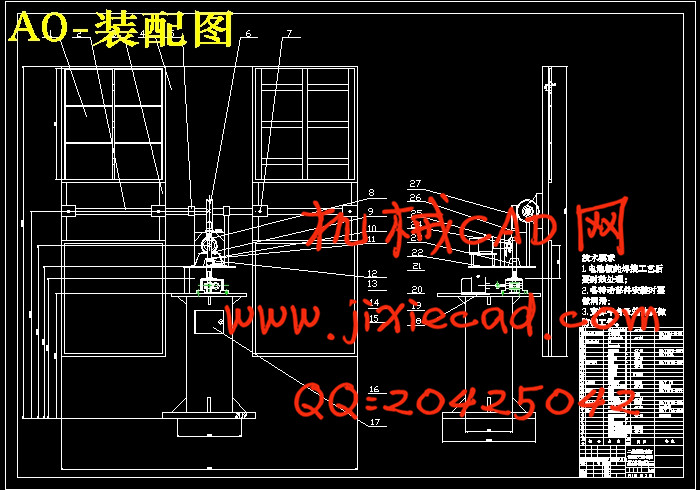
机械结构主要包括支撑立柱、、水平驱动减速机和垂直驱动蜗轮蜗杆等。当太阳光线发生偏离时,控制部分发出控制信号驱动步进电机1带动水平驱动减速机转动,水平驱动减速机带动主轴转动,实现水平方向跟踪;每间隔20分钟控制信号驱动步进电机2带动蜗轮,蜗轮带动蜗杆和太阳能板实现垂直方向转动,通过步进电机1、步进电机2的共同工作实现对太阳的跟踪。
第二,控制部分设计:
主要包括传感器部分、信号转换电路、单片机系统和电机驱动电路等。系统采用光电检测追踪模式实现对太阳的跟踪。传感器采用光敏电阻,将两个完全相同的光敏电阻分别放置于一块电池板东西方向边沿处下方。当两个光敏电阻接收到的光强度不相同时,通过运放比较电路将信号送给单片机,驱动步进电机正反转,实现电池板对太阳的跟踪。
关键词 太阳能;跟踪;光敏电阻;单片机;步进电机
Two dimensional tracking solar photovoltaic power generation device design
Abstract
Human being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on. These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar. In this paper, the solar tracking system of the mechanical part and control system part are designed.
First, the mechanical part of the design:
Mechanical structure including support columns, the horizontal drive reducer and vertical drive worm. When the sun's rays to deviate from the control section to issue control signals drive a stepper motor driven horizontal drive reducer rotation, the horizontal drive gear reducer drive shaft rotation, the horizontal direction tracking; each interval of 20 minutes the control signal to drive a stepper motor driven worm gear worm gear driven by the worm and the solar panels perpendicular to the direction of rotation, stepper motor, stepper motor work together to achieve the tracking of the sun
Second, control system part is designed.
Control system mainly includes the sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection system is used to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances received different light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors.
Keywords: Solar energy , Tracking . Photosensitive resistance ,SCM , Stepping motor
目 录
1绪论 1
1.1课题来源 1
1.2太阳能利用的国内外发展现状 1
1.3太阳能利用的发展趋势 2
2太阳能自动跟踪系统总体设计 4
2.1设计传动原理示意图 4
2.2工作原理简述 5
2.3工作环境要求 6
2.4设计内容要求 6
3电池板的选择及布局分析 7
3.1太阳能电池的种类及选择 7
3.1.1太阳能电池板的发展及种类...........................................................................................7
3.1.2电池板的参数和选择.......................................................................................................8
3.2太阳能电池板的布局和分析 9
3.2.1电池板的参数分析 9
3.2.2边框及其固定结构设计 10
3.2.3铝合金材料选择 11
4电动机的选择 13
4.1电动机功率的确定 13
4.1.1工作机各传动部件的传动效率及总效率.....................................................................13
4.1.2电动机的功率确定.........................................................................................................13
4.1.3确定电动机的转速.........................................................................................................15
4.2计算各轴的输出功率及转矩 16
5.蜗杆减速装置设计及参数计算................................................................................................18
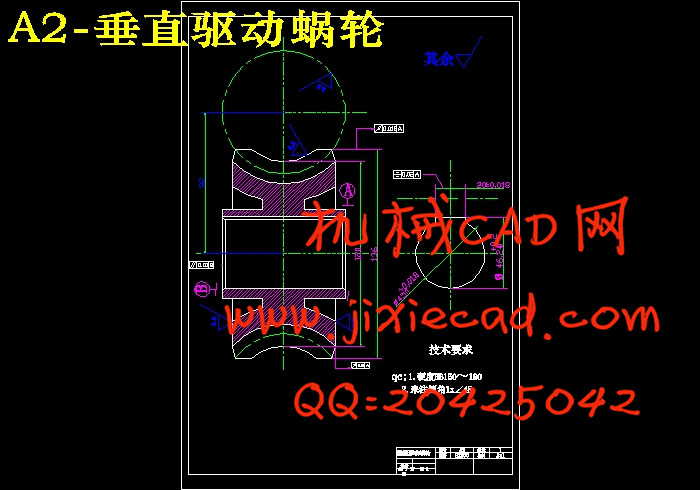
5.1蜗杆蜗轮的设计及参数计算..............................................................................................18
5.1.1传动参数.......................................................................................................................18
5.1.2蜗轮蜗杆材料及强度计算...........................................................................................18
5.1.3计算相对滑动速度与传动效率...................................................................................18
5.1.4确定主要集合尺寸.......................................................................................................19
5.2蜗杆传动的几何尺寸计算 20
6箱体的结构尺寸设计..................................................................................................................21
6.1箱体的设计计算 ................................................................................................................21
6.1.1箱体的结构形式和材料...............................................................................................21
6.2箱体主要结构尺寸和关系..................................................................................................21
7传感器的基本原理及选择.........................................................................................................24
7.1传感器的分类......................................................................................................................24
7.1.1传感器分类…………………………………………………………………………………………….............24
7.1.2选择分析…………………………………………………………………………...……………………….......24
7.2所选传感器的解析…………………………………………………………………………...………………......25
7.2.1光敏传感器………………………………………………………………………………………………......25
7.2.2压力传感器………………………………………………………………………………………………........26
8.设计小结……………………………………………………………………………………………………...….......28
致谢...............................................................................................................................................29
参考文献 30
附录1 31
附录2 32
摘 要
人类正面临着石油和煤炭等矿物燃料枯竭的严重威胁,太阳能作为一种新型能源具有储量无限、普遍存在、利用清洁、使用经济等优点,但是太阳能又存在着低密度、间歇性、空间分布不断变化的缺点,这就使目前的一系列太阳能设备对太阳能的利用率不高。太阳光线跟踪装置解决了太阳能利用率不高的问题。本文对太阳能跟踪系统进行了机械设计和跟踪系统控制部分设计。
第一,机械部分设计:
机械结构主要包括支撑立柱、、水平驱动减速机和垂直驱动蜗轮蜗杆等。当太阳光线发生偏离时,控制部分发出控制信号驱动步进电机1带动水平驱动减速机转动,水平驱动减速机带动主轴转动,实现水平方向跟踪;每间隔20分钟控制信号驱动步进电机2带动蜗轮,蜗轮带动蜗杆和太阳能板实现垂直方向转动,通过步进电机1、步进电机2的共同工作实现对太阳的跟踪。
第二,控制部分设计:
主要包括传感器部分、信号转换电路、单片机系统和电机驱动电路等。系统采用光电检测追踪模式实现对太阳的跟踪。传感器采用光敏电阻,将两个完全相同的光敏电阻分别放置于一块电池板东西方向边沿处下方。当两个光敏电阻接收到的光强度不相同时,通过运放比较电路将信号送给单片机,驱动步进电机正反转,实现电池板对太阳的跟踪。
关键词 太阳能;跟踪;光敏电阻;单片机;步进电机
Two dimensional tracking solar photovoltaic power generation device design
Abstract
Human being is seriously threatened by exhausting mineral fuel, such as coal and fossil oil. As a kind of new type of energy sources, solar energy has the advantages of unlimited reserves, existing everywhere,using clean and economical .But it also has disadvantages ,such as low density,intermission,change of space distributing and so on. These make that the current series of solar energy equipment for the utilization of solar energy is not high. In order to keep the energy exchange part to plumb up the solar beam,it must track the movement of solar. In this paper, the solar tracking system of the mechanical part and control system part are designed.
First, the mechanical part of the design:
Mechanical structure including support columns, the horizontal drive reducer and vertical drive worm. When the sun's rays to deviate from the control section to issue control signals drive a stepper motor driven horizontal drive reducer rotation, the horizontal drive gear reducer drive shaft rotation, the horizontal direction tracking; each interval of 20 minutes the control signal to drive a stepper motor driven worm gear worm gear driven by the worm and the solar panels perpendicular to the direction of rotation, stepper motor, stepper motor work together to achieve the tracking of the sun
Second, control system part is designed.
Control system mainly includes the sensors part, stepper motor, MCU system and the corresponding external circuit, and so on. Photoelectric detection system is used to track solar. Sensors use photosensitive resistance. The two same photosensitive resistances were placed in east and west direction of the bottom edge .When the two photosensitive resistances received different light at the same time, the signal from comparison circuit is sent to MCU in order to rotate stepping motors.
Keywords: Solar energy , Tracking . Photosensitive resistance ,SCM , Stepping motor
目 录
1绪论 1
1.1课题来源 1
1.2太阳能利用的国内外发展现状 1
1.3太阳能利用的发展趋势 2
2太阳能自动跟踪系统总体设计 4
2.1设计传动原理示意图 4
2.2工作原理简述 5
2.3工作环境要求 6
2.4设计内容要求 6
3电池板的选择及布局分析 7
3.1太阳能电池的种类及选择 7
3.1.1太阳能电池板的发展及种类...........................................................................................7
3.1.2电池板的参数和选择.......................................................................................................8
3.2太阳能电池板的布局和分析 9
3.2.1电池板的参数分析 9
3.2.2边框及其固定结构设计 10
3.2.3铝合金材料选择 11
4电动机的选择 13
4.1电动机功率的确定 13
4.1.1工作机各传动部件的传动效率及总效率.....................................................................13
4.1.2电动机的功率确定.........................................................................................................13
4.1.3确定电动机的转速.........................................................................................................15
4.2计算各轴的输出功率及转矩 16
5.蜗杆减速装置设计及参数计算................................................................................................18
5.1蜗杆蜗轮的设计及参数计算..............................................................................................18
5.1.1传动参数.......................................................................................................................18
5.1.2蜗轮蜗杆材料及强度计算...........................................................................................18
5.1.3计算相对滑动速度与传动效率...................................................................................18
5.1.4确定主要集合尺寸.......................................................................................................19
5.2蜗杆传动的几何尺寸计算 20
6箱体的结构尺寸设计..................................................................................................................21
6.1箱体的设计计算 ................................................................................................................21
6.1.1箱体的结构形式和材料...............................................................................................21
6.2箱体主要结构尺寸和关系..................................................................................................21
7传感器的基本原理及选择.........................................................................................................24
7.1传感器的分类......................................................................................................................24
7.1.1传感器分类…………………………………………………………………………………………….............24
7.1.2选择分析…………………………………………………………………………...……………………….......24
7.2所选传感器的解析…………………………………………………………………………...………………......25
7.2.1光敏传感器………………………………………………………………………………………………......25
7.2.2压力传感器………………………………………………………………………………………………........26
8.设计小结……………………………………………………………………………………………………...….......28
致谢...............................................................................................................................................29
参考文献 30
附录1 31
附录2 32