设计简介
机器人技术代表了机电一体化的最高成就,是二十世纪人类最伟大的成果之一机器人中的两足步行机器人虽然只有近四十年的历史,但是由于它独特的适应性和拟人性,成为了机器人领域的一个重要发展方向。本文主要介绍了机器人发展的历史,国内外发展的近况,此外对机器人的结构进行了研究,对机器人液晶显示屏技术做了详细的介绍。在结构方面主要是对自由度配置的合理性进行了研究和讨论,主要探讨了机器人行走功能的可行性,行走过程中重心的转移问题,以及怎样保持机器人在行走过程中的连续性问题。还介绍了机器人的组装方法。
机器人主板所使用的材料等。最后在液晶显示屏方面介绍了相关的技术理论。
 关键词 两足机器人 液晶显示屏 结构
关键词 两足机器人 液晶显示屏 结构
Abstract
Robotics is the representation of the best achievemeng of Mechantronics,and is one of the greatest fruts of humankind in the 20th century.Though the biped robot has only 40 years history,it became one of the most inportant branches of robotics for its unique fitness and anthropomorphism.Biped robot has much better adaptatin to environment in human living-spacce than wheel type,crawl type and pedrail type mobile robots.this advantage is much more obvious under unconstructrd environment.This article introduced the history of the robot and the developments in the world,and do the study of the frame of robot.It also make a travers to the LCD screan.
Keywords Bipedrobot LCDscrean frame
Bipedrobot LCDscrean frame
目 录
1 绪论…………………………………………………………………………… 1
1.1 引言……………………………………………………………………………… 1
1.2 机器人的发展及技术………………………………………… …………………1
1.3 双足机器人优点及国内外研究概况…………………………………………… 2
2 双足机器人的本体结构设计………………………………………………………8
2.1 引言……………………………………………………………………………8
2.2 两足机器人的结构设计…………………………………………………………8
2.3 双足机器人的自由度配置………………………………………………………9
2.4 驱动方式的选择………………………………………………………………11
3 双足行走机器人的3D图……………………………………………………………13
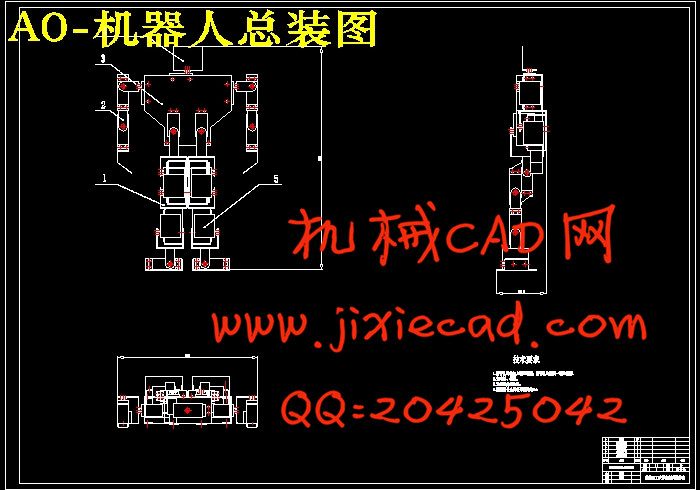
3.1 总体结构图………………………………………………………………………13
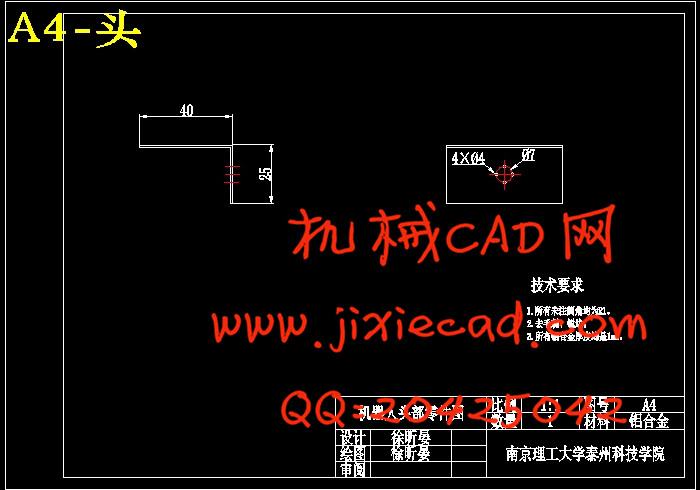
3.2 头部的部件图…………………………………………………………………15
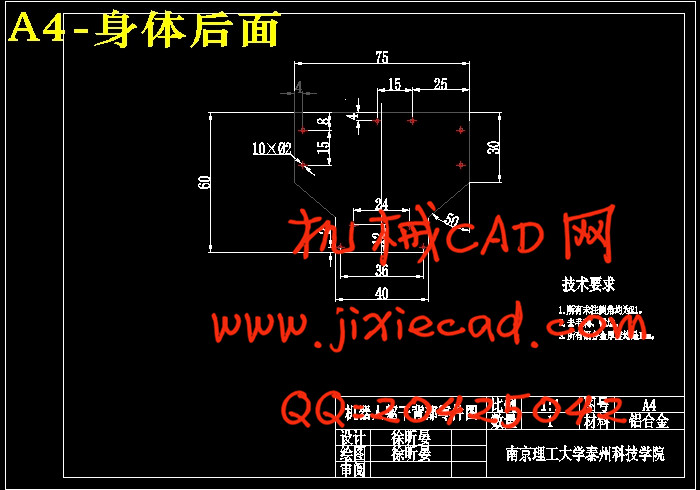
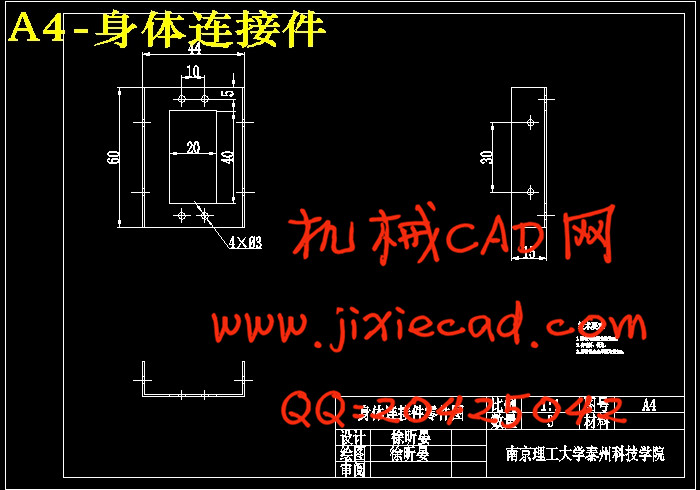
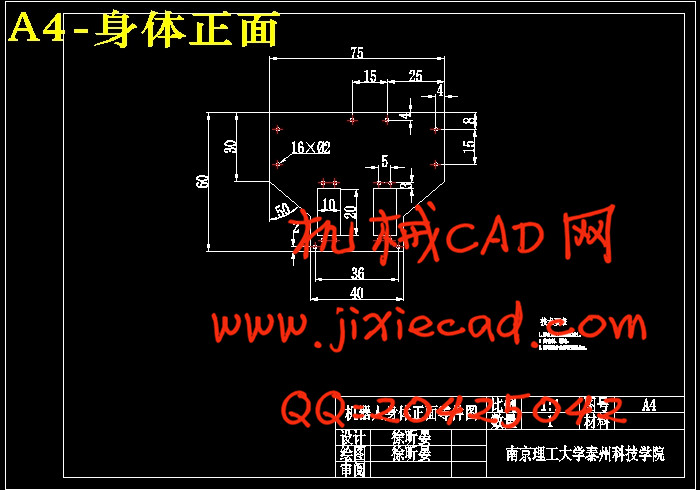
3.3 身体部分部件图…………………………………………………………………16
4 液晶显示屏…………………………………………………………………………18
4.1 引言………………………………………………………………………………18
4.2 LCD系统的实现…………………………………………………………………18
4.3 触摸屏控制技术的实现…………………………………………………………20
结束语 ……………………………………………………………………………… 26
致谢………………………………………………………………………………… 27
参考文献………………………………………………………………………………28
机器人主板所使用的材料等。最后在液晶显示屏方面介绍了相关的技术理论。
Abstract
Robotics is the representation of the best achievemeng of Mechantronics,and is one of the greatest fruts of humankind in the 20th century.Though the biped robot has only 40 years history,it became one of the most inportant branches of robotics for its unique fitness and anthropomorphism.Biped robot has much better adaptatin to environment in human living-spacce than wheel type,crawl type and pedrail type mobile robots.this advantage is much more obvious under unconstructrd environment.This article introduced the history of the robot and the developments in the world,and do the study of the frame of robot.It also make a travers to the LCD screan.
Keywords
目 录
1 绪论…………………………………………………………………………… 1
1.1 引言……………………………………………………………………………… 1
1.2 机器人的发展及技术………………………………………… …………………1
1.3 双足机器人优点及国内外研究概况…………………………………………… 2
2 双足机器人的本体结构设计………………………………………………………8
2.1 引言……………………………………………………………………………8
2.2 两足机器人的结构设计…………………………………………………………8
2.3 双足机器人的自由度配置………………………………………………………9
2.4 驱动方式的选择………………………………………………………………11
3 双足行走机器人的3D图……………………………………………………………13
3.1 总体结构图………………………………………………………………………13
3.2 头部的部件图…………………………………………………………………15
3.3 身体部分部件图…………………………………………………………………16
4 液晶显示屏…………………………………………………………………………18
4.1 引言………………………………………………………………………………18
4.2 LCD系统的实现…………………………………………………………………18
4.3 触摸屏控制技术的实现…………………………………………………………20
结束语 ……………………………………………………………………………… 26
致谢………………………………………………………………………………… 27
参考文献………………………………………………………………………………28