设计简介
摘 要
本文所设计的主从系统是由主操作手与五指灵巧手组成。主操作手将操作者手指运动信息传递给五指灵巧手,控制五指灵巧手完成一定的目标任务,同时将五指灵巧手所受力反馈给操作者。主操作手采用最基本的连杆机构作为骨架结构,超声制动器与涡旋弹簧实现力反馈的作用;五指灵巧手是以超声电机作为驱动单元,由弹性线作为传动装置设计了一种仿人灵巧手。
最后,本文以DSP2812作为处理器建立了主从系统的运动控制系统,包括主从系统硬件电路设计与软件编程两大方面。硬件电路设计由DSP2812系统电路,超声电机正反转/调速电路,数据采集电路等组成;软件编程方面采用增量式数字PID的控制方法,实现了对主从系统的位置反馈控制。
关键词:主操作手,五指灵巧手, 触感交互装置
Abstract
The master-slave control system proposed in the paper is composed by master hand and five-fingered dexterous hand. The master hand transports the movement of the operator to the five-fingered dexterous hand and controls the five-fingered dexterous hand to complete the certain tasks. At the same time, the force from the five-fingered hand is feedback to the operator. The structure of the master hand adopts the links mechanism and the force feedback is achieved by the ultrasonic brakes and vortex springs. The five-fingered hand is driven by ultrasonic motors and transmitted by elastic lines.
Finally, the master-slave control system based on DSP is established in the paper, including the master-slave control system hardware circuit and software programming. The hardware circuits include the module of DSP2812 system, direction control module of USMs, velocity control module of USMs, data acquisition module and so on. Incremental digital PID control method is used to realize the location feedback control.
Key Words:Master hand;Five-fingered hand;Haptic interface device
目录
摘 要 1
Abstract 2
目录 3
第一章 引言 4
1.1灵巧手系统的发展概况 4
1.2灵巧型触感装置的介绍 6
1.2.1穿戴型主操作手例说 7
1.2.2桌面型主操作手例说 9
第二章 被动式力反馈主操作手设计 11
2.1主操作手设计任务 11
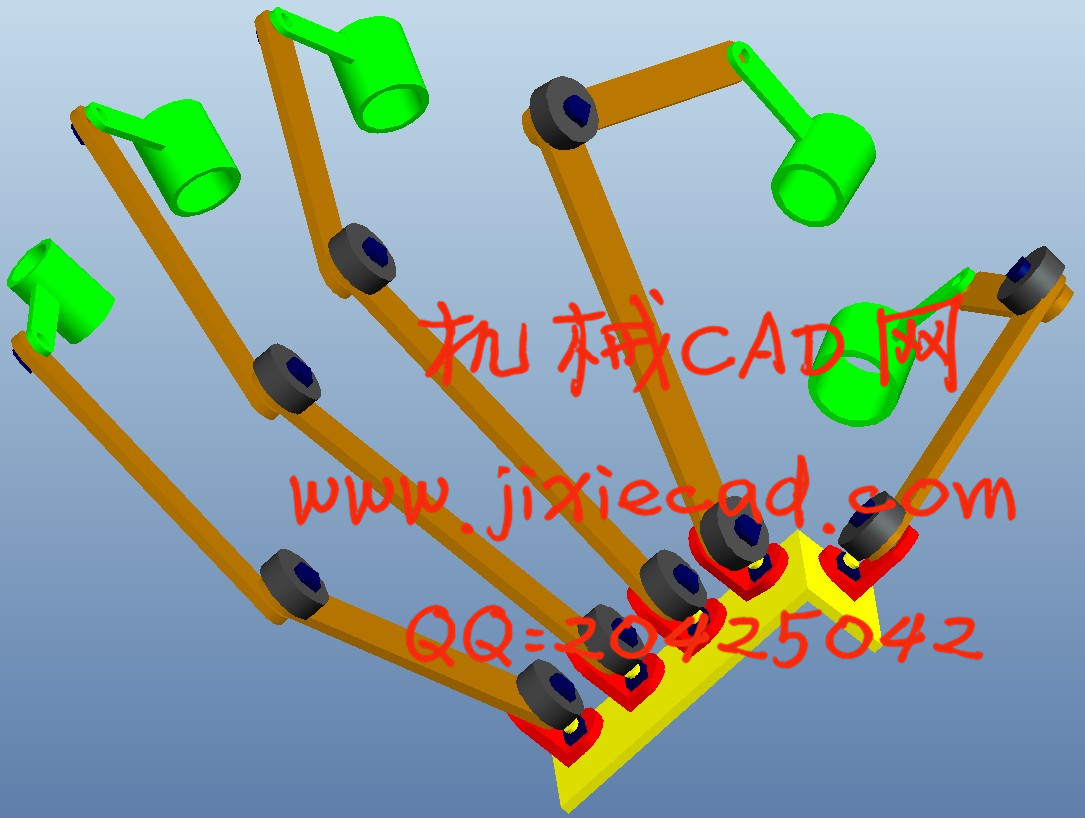
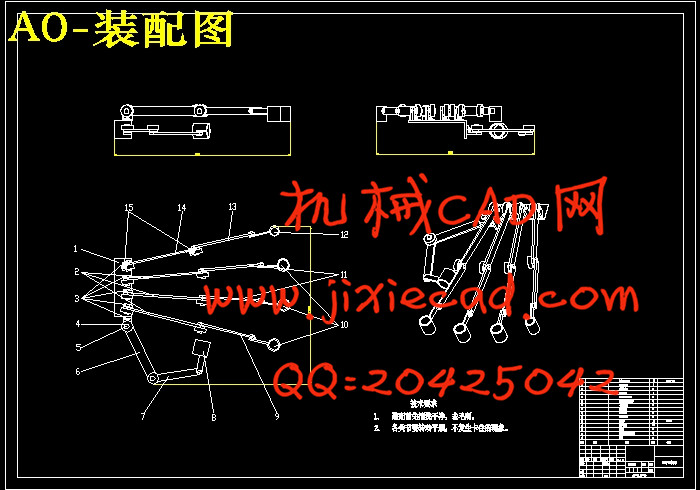
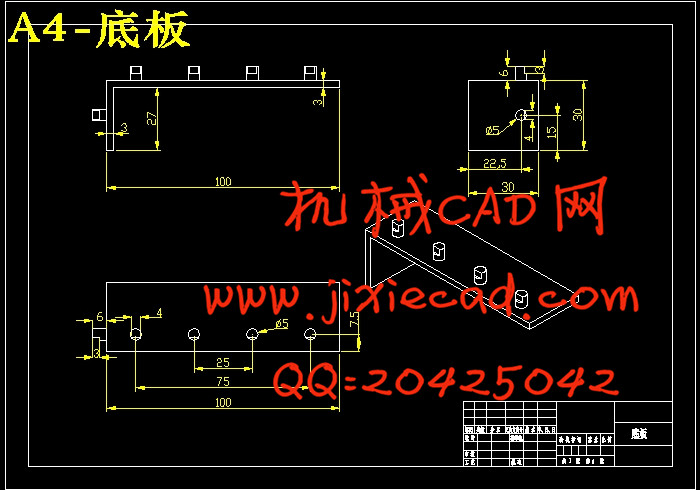
2.2被动式力反馈主操作手机械结构设计 11
2.2.1主手总体结构 12
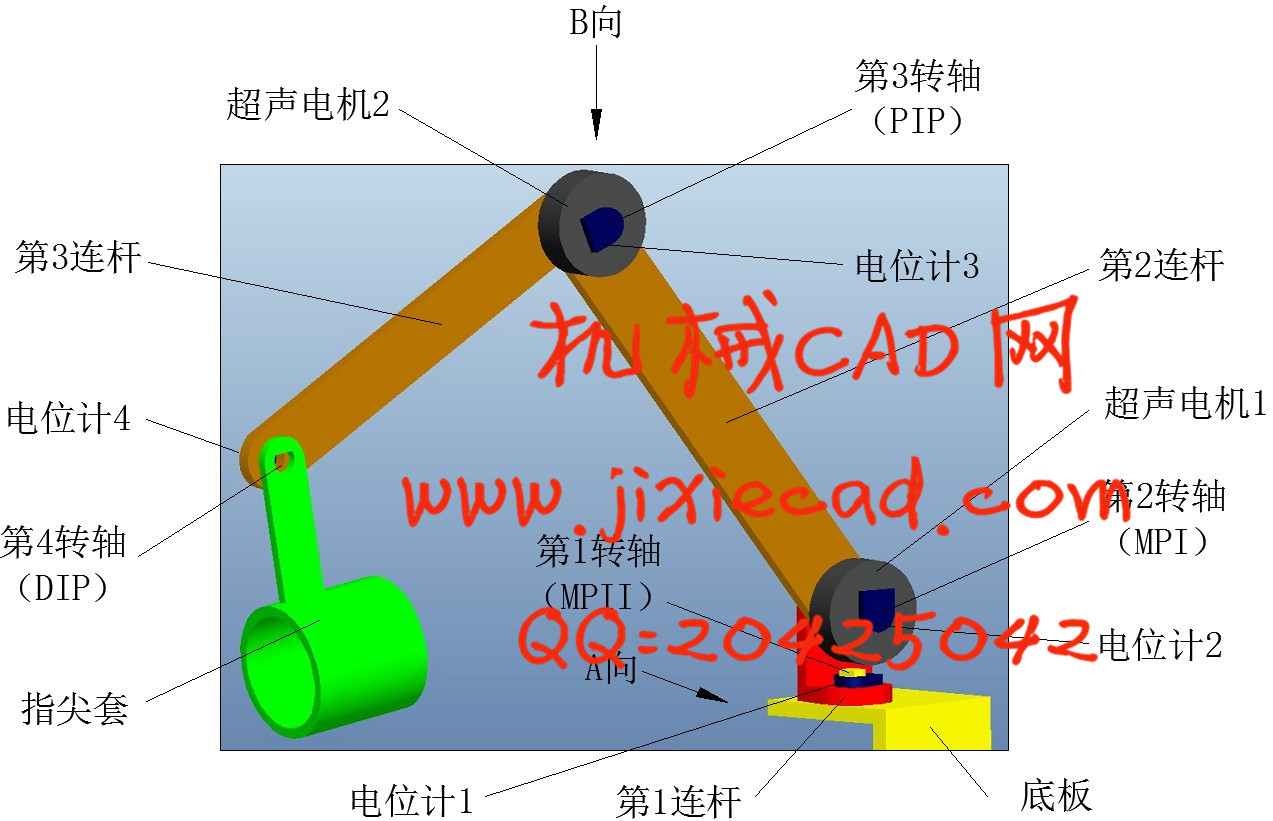
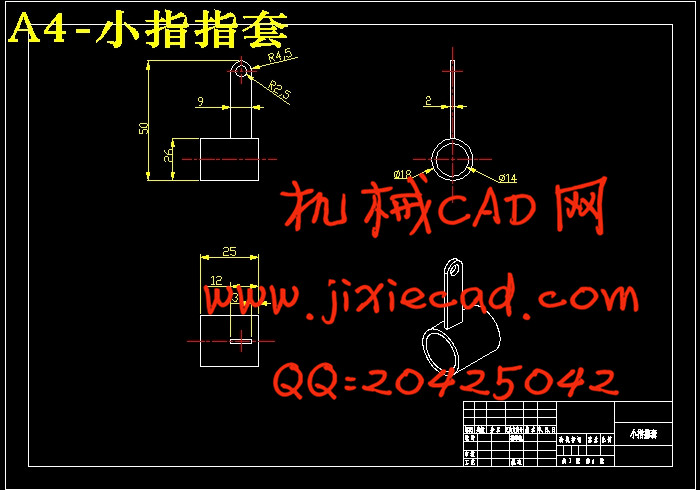
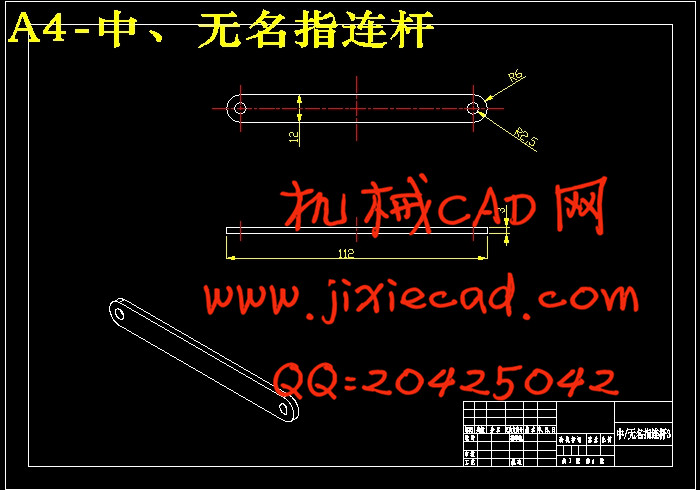
2.2.2主手单手指结构设计 12
2.3传感器的选用 15
2.4主手指尖位姿计算 16
2.5主手力反馈计算 18
2.6本章小结 22
第三章 主从控制系统硬件设计 23
3.1电源电路 23
3.2核心处理器 23
3.2.1控制芯片的选择 23
3.2.2SEED-DEC2812开发板资源利用 25
3.3超声电机驱动控制电路 26
3.3.1超声电机的驱动电路 26
3.3.2超声电机的控制电路 27
3.4数据采集电路 31
3.5本章小结 33
第四章 总结与展望 34
4.1总结 34
4.2展望 34
致 谢 37
参 考 文 献 38
本文所设计的主从系统是由主操作手与五指灵巧手组成。主操作手将操作者手指运动信息传递给五指灵巧手,控制五指灵巧手完成一定的目标任务,同时将五指灵巧手所受力反馈给操作者。主操作手采用最基本的连杆机构作为骨架结构,超声制动器与涡旋弹簧实现力反馈的作用;五指灵巧手是以超声电机作为驱动单元,由弹性线作为传动装置设计了一种仿人灵巧手。
最后,本文以DSP2812作为处理器建立了主从系统的运动控制系统,包括主从系统硬件电路设计与软件编程两大方面。硬件电路设计由DSP2812系统电路,超声电机正反转/调速电路,数据采集电路等组成;软件编程方面采用增量式数字PID的控制方法,实现了对主从系统的位置反馈控制。
关键词:主操作手,五指灵巧手, 触感交互装置
Abstract
The master-slave control system proposed in the paper is composed by master hand and five-fingered dexterous hand. The master hand transports the movement of the operator to the five-fingered dexterous hand and controls the five-fingered dexterous hand to complete the certain tasks. At the same time, the force from the five-fingered hand is feedback to the operator. The structure of the master hand adopts the links mechanism and the force feedback is achieved by the ultrasonic brakes and vortex springs. The five-fingered hand is driven by ultrasonic motors and transmitted by elastic lines.
Finally, the master-slave control system based on DSP is established in the paper, including the master-slave control system hardware circuit and software programming. The hardware circuits include the module of DSP2812 system, direction control module of USMs, velocity control module of USMs, data acquisition module and so on. Incremental digital PID control method is used to realize the location feedback control.
Key Words:Master hand;Five-fingered hand;Haptic interface device
目录
摘 要 1
Abstract 2
目录 3
第一章 引言 4
1.1灵巧手系统的发展概况 4
1.2灵巧型触感装置的介绍 6
1.2.1穿戴型主操作手例说 7
1.2.2桌面型主操作手例说 9
第二章 被动式力反馈主操作手设计 11
2.1主操作手设计任务 11
2.2被动式力反馈主操作手机械结构设计 11
2.2.1主手总体结构 12
2.2.2主手单手指结构设计 12
2.3传感器的选用 15
2.4主手指尖位姿计算 16
2.5主手力反馈计算 18
2.6本章小结 22
第三章 主从控制系统硬件设计 23
3.1电源电路 23
3.2核心处理器 23
3.2.1控制芯片的选择 23
3.2.2SEED-DEC2812开发板资源利用 25
3.3超声电机驱动控制电路 26
3.3.1超声电机的驱动电路 26
3.3.2超声电机的控制电路 27
3.4数据采集电路 31
3.5本章小结 33
第四章 总结与展望 34
4.1总结 34
4.2展望 34
致 谢 37
参 考 文 献 38