设计简介
中文摘要
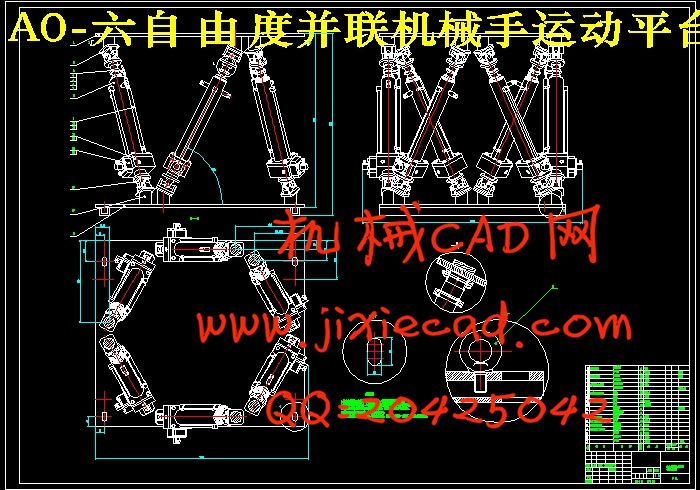
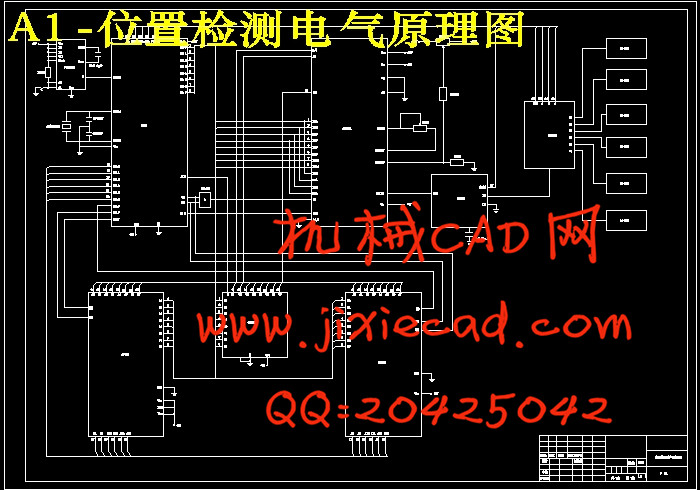
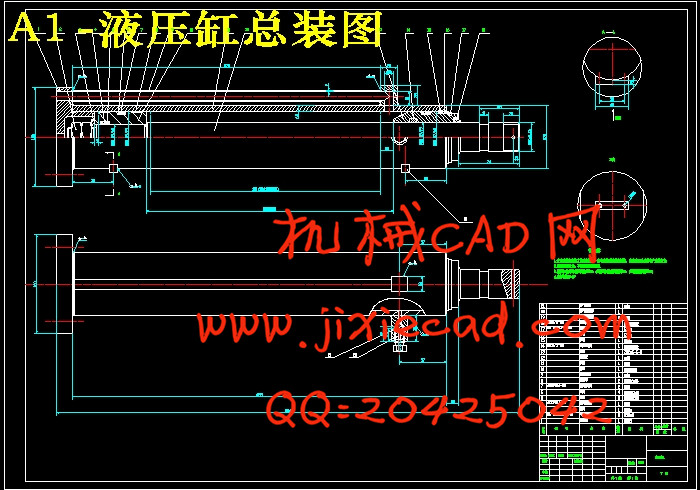
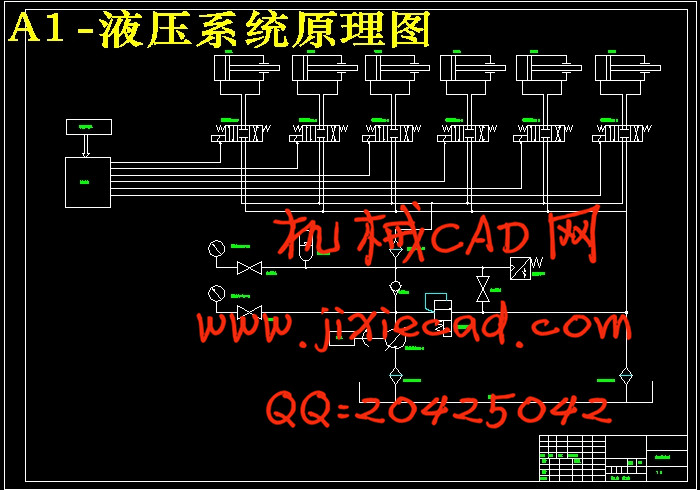
并联运动机构是新发展起来的一种机构,与传统串联机构相比,并联机构有结构简单、刚度高、动态性能好、速度快、可重构等优点,在运动模拟器、并联机器人、并联机床、微动器等领域有广泛的应用。本六自由度液压伺服并联机械手是由动平台、固定平台、电液伺服控制子系统等组成,以液压缸为执行元件、以电液伺服阀为控制元件,来控制实现平台的各种动作。本文参照已有结构并结合ADAMS仿真软件对六自由度并联机械手进行了概念设计并讨论了对其运用牛顿迭代法进行运动学正解的过程。对于结构部分,本文主要对并联机械手的六自由度运动平台进行了设计。六自由度并联机械手电液伺服子系统包括非对阵直线液压缸、电液伺服阀、位置传感器、D/A转换器、A/D转换器、控制电路及主控计算机等,本文主要对液压缸的结构,电液伺服阀及位置传感器的选择、安装,位置检测电路进行了设计。
关键词 并联机构 运动学正解 液压缸 电液伺服 位置检测
Abstract
Parallel kinematics mechanism is a new developed mechanism ,compared with the traditional series mechanism ,it has simpler structure ,higher stiffness ,better dynamic performance and be faster ,and has a wide range of applications in the fields of motion simulator ,parallel robot ,parallel machines ,micro-actuators ,and so on.This 6-DOF hydraulic servo parallel manipulator is composed of a mobile platform ,a base platform and electro-hydraulic servo control subsystem ,and takes hydraulic cylinders for the implementation of components ,electro-hydraulic servo valve for the control components to control the platform to achieve the various movements .This article has been reference to the existent structure and use the simulation software ADAMS to make a conceptual design of 6-DOF parallel manipulator, and discussed the process of it's kinematics positive solutions use the Newton's method .To the structure part ,this article mostly designed the 6-DOF movement platform of the parallel manipulator ,and established the CATIA model of this system .The electro-hydraulic servo subsystem of the 6-DOF parallel manipulator including non-symmetry linear hydraulic cylinder ,electro-hydraulic servo valve ,position sensor ,D/A transformer ,A/D transformer ,control circuit and control computer and so on .This paper mostly designed the structure of the hydraulic cylinders ,the choice and installation of the servo valve and the location sensors and the location detection circuit.
Keywords Parallel mechanism Kinematics positive solutions Cylinder Electro-hydraulic servo Position detection
目录
中文摘要 IAbstract II
目录 III
第一章 绪论 1
1.1 并联机构的提出 1
1.2 并联机构的应用现状 2
1.3 并联机构的研究展望 6
第二章 并联机构概述及设计任务 8
2.1 并联机构的特点 8
2.2 并联机构的分类 8
2.3 设计任务 10
2.4 工作内容 10
第三章 并联机构的概念设计及分析方法 11
3.1 结构形式的选择 11
3.2 驱动机构的选择 12
3.3 自由度计算 13
3.4 并联机构的位置分析方法 14
3.5 并联机构的运动分析方法 21
3.6 并联机构动力学分析方法 21
3.7 平台结构参数的确定 22
第四章 液压缸设计计算 29
4.1 液压缸类型的选择 29
4.2 液压缸安装方式的选择 29
4.3 液压缸主要尺寸的确定 29
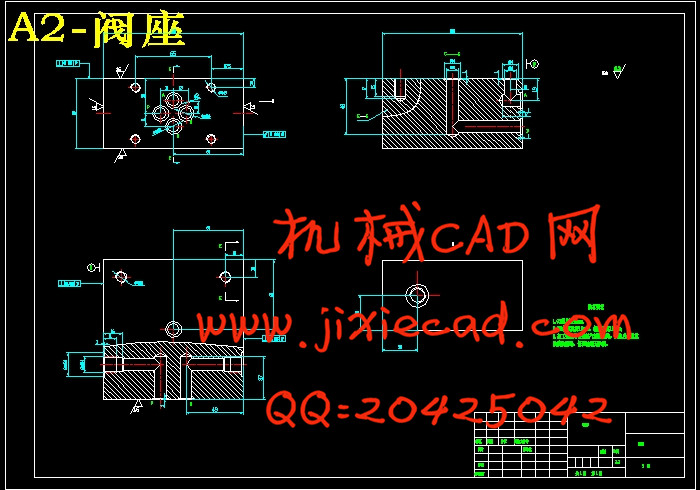
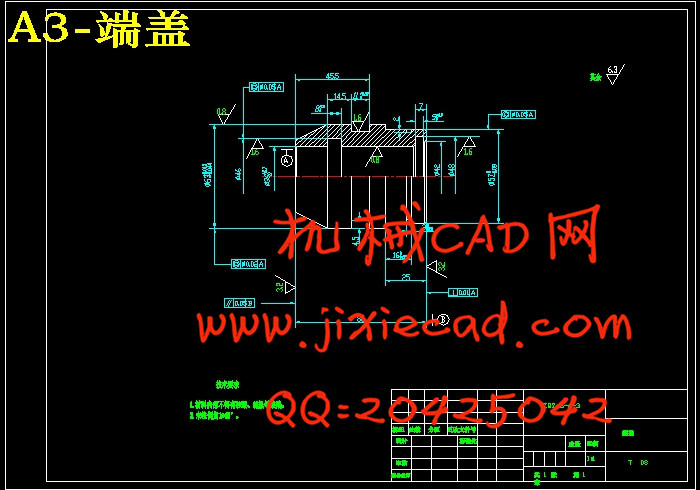
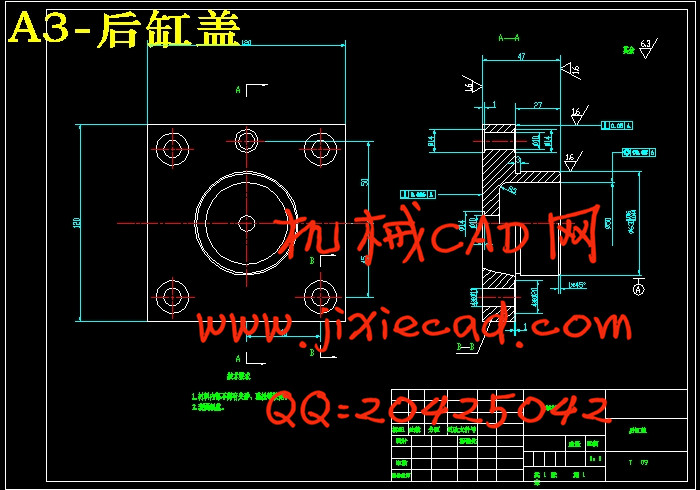
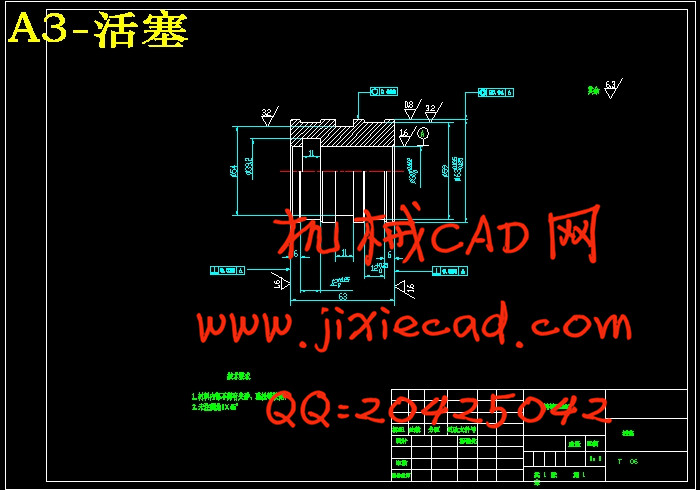
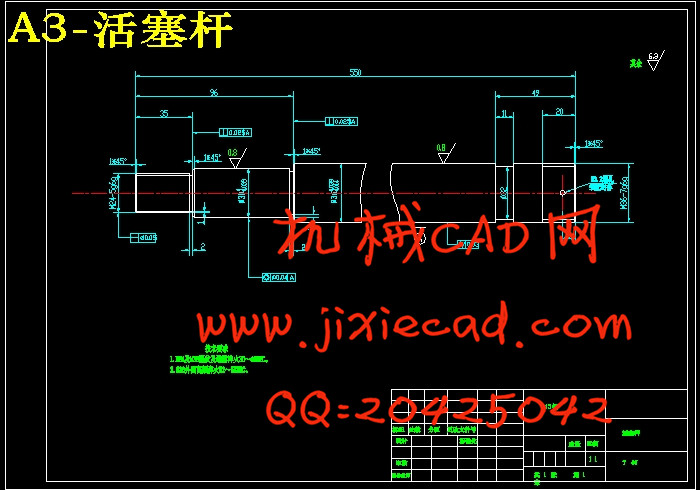
4.4 液压缸的结构设计 35
第五章 电液伺服系统总体方案设计 38
5.1 系统组成 38
5.2 电液伺服系统的构成 38
5.3 六自由度运动模拟器位置伺服控制系统工作过程 39
第六章 电气原理设计(液压缸位移检测电路) 41
6.1 电气系统的基本组成 41
6.2 电气系统主要元件的选择 42
6.3 电气系统的设计 44
第七章 液压伺服系统设计 50
7.1 液压控制回路方案确定 50
7.2 六自由度并联机械手液压控制回路的构成 50
7.3 液压回路主要元件的选择 51
毕业设计总结 56
参考文献 57