设计简介
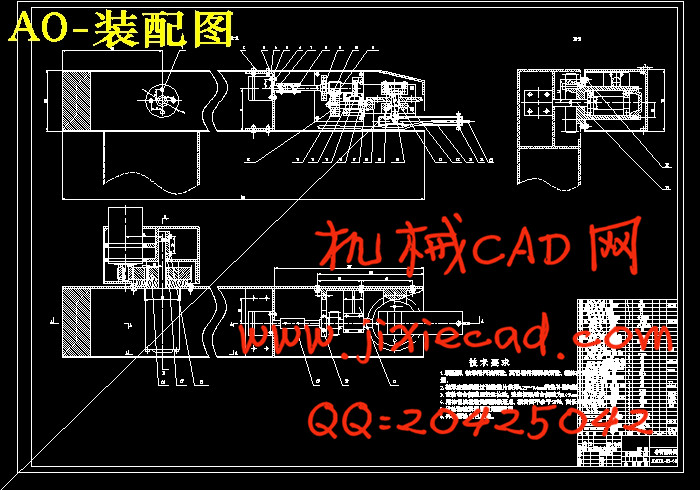
本设计的课题是喷涂机器人臂部与手部的设计,主要是臂部和腕部的结构设计及其零件设计。此课题来源于生产实际,是针对目前手工喷涂效率低,操作环境差,而且对操作员技术熟练程度要求高,因此采用机器人技术,可以实现喷涂工作的柔性自动化,提高产品质量与劳动生产率,实现生产过程的自动化,改善劳动条件。
对喷涂机器人机械臂结构及小臂自重平衡系统进行设计。
喷涂工件外形尺寸800mm x500mm x500mm(长x宽x髙);
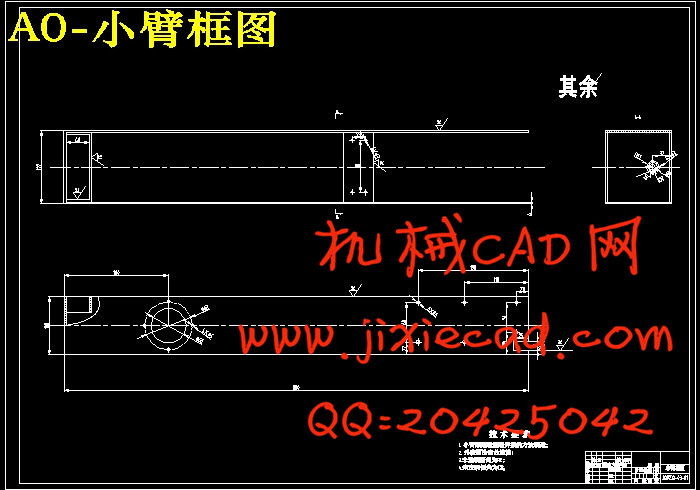
机械臂的结构尺寸为:大臂长约700mm左右,小臂长约800mm左右,臂杆横截面尺寸 ≤ 100mm x100mm;手部尺寸约150mm左右;小臂摆角80°(上摆30°,下摆50°)。
对影响自重平衡的主要结构参数进行优化设计与计算,示教时的不平衡力≤2kg。
此次设计的垂直多关节机器人可以实现大臂小臂的旋转,手腕的旋转与摆动。此装置应用在喷涂生产线上将大大提高生产效率和质量,降低了工人的劳动强度,能够带来可观的经济效益。
(1) 手腕处于手臂末端,需减轻手臂的载荷,力求手腕部的结构紧凑,减少重量和体积。
(2) 设计小臂的平衡系统,使小臂在撤除驱动力的情况不会发生突发性转动。
针对上述问题有了以下设计思路:
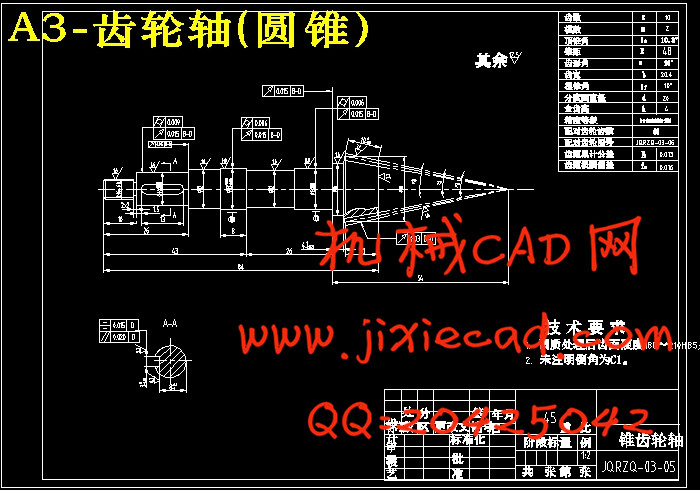
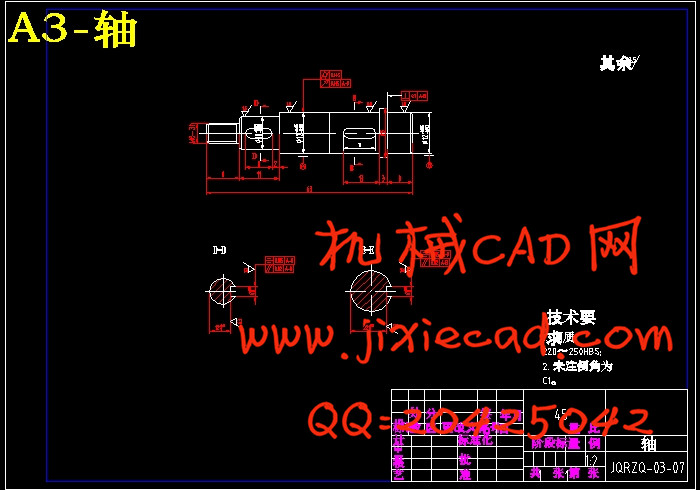
(1) 手腕部机构的驱动装置采用分离传动,采用传动轴,将驱动器安置在小臂的后端。
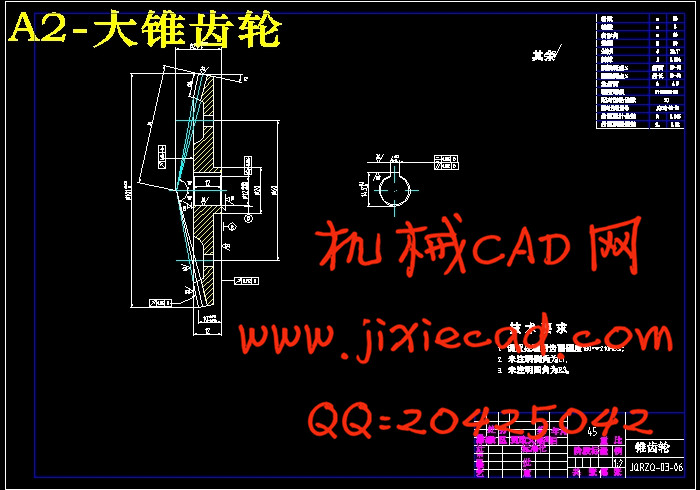
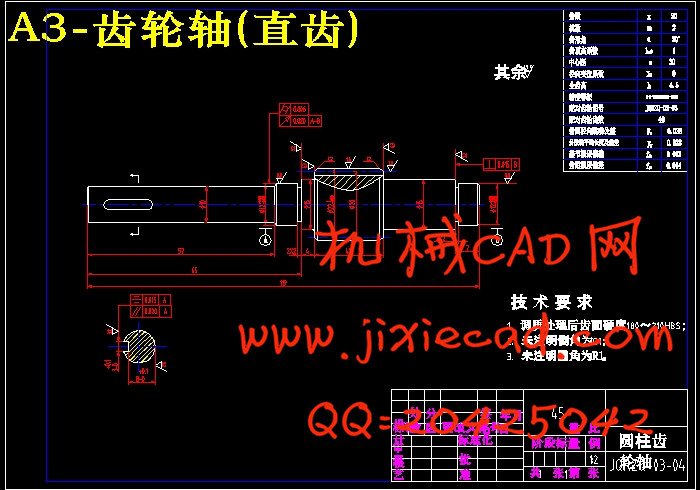
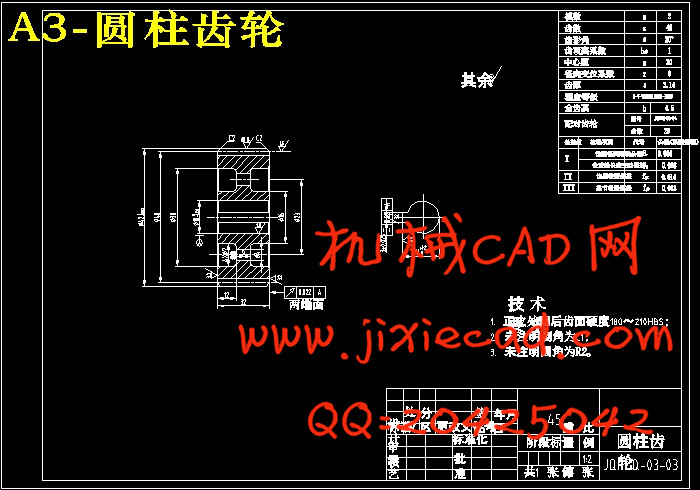
(2) 驱动电机经联轴器与传动轴驱动一对圆柱齿轮和一对圆锥齿轮传动来带动手腕作偏摆运动。
(3) 手部的驱动电机安装在小臂内部,以此来减轻手部的重量,让手部能够作灵活的运动。
(4) 对于小臂平衡是采用重力平衡的方式,及在小臂末端放置铁块。
技术要求及预期效果
根据设计要达到以下要求:对喷涂机器人机械臂结构及小臂自重平衡系统进行设计。
喷涂工件外形尺寸800mm x500mm x500mm(长x宽x髙);
机械臂的结构尺寸为:大臂长约700mm左右,小臂长约800mm左右,臂杆横截面尺寸 ≤ 100mm x100mm;手部尺寸约150mm左右;小臂摆角80°(上摆30°,下摆50°)。
对影响自重平衡的主要结构参数进行优化设计与计算,示教时的不平衡力≤2kg。
此次设计的垂直多关节机器人可以实现大臂小臂的旋转,手腕的旋转与摆动。此装置应用在喷涂生产线上将大大提高生产效率和质量,降低了工人的劳动强度,能够带来可观的经济效益。
本课题要解决的主要问题及设计总体思路
本课题要解决的问题有以下二个:(1) 手腕处于手臂末端,需减轻手臂的载荷,力求手腕部的结构紧凑,减少重量和体积。
(2) 设计小臂的平衡系统,使小臂在撤除驱动力的情况不会发生突发性转动。
针对上述问题有了以下设计思路:
(1) 手腕部机构的驱动装置采用分离传动,采用传动轴,将驱动器安置在小臂的后端。
(2) 驱动电机经联轴器与传动轴驱动一对圆柱齿轮和一对圆锥齿轮传动来带动手腕作偏摆运动。
(3) 手部的驱动电机安装在小臂内部,以此来减轻手部的重量,让手部能够作灵活的运动。
(4) 对于小臂平衡是采用重力平衡的方式,及在小臂末端放置铁块。