设计简介
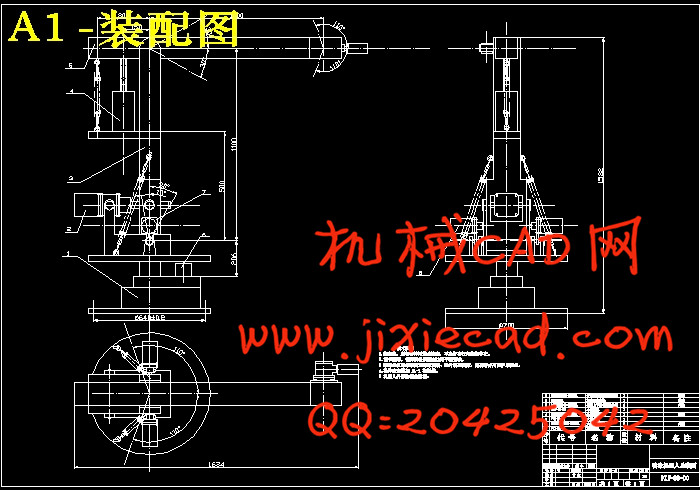
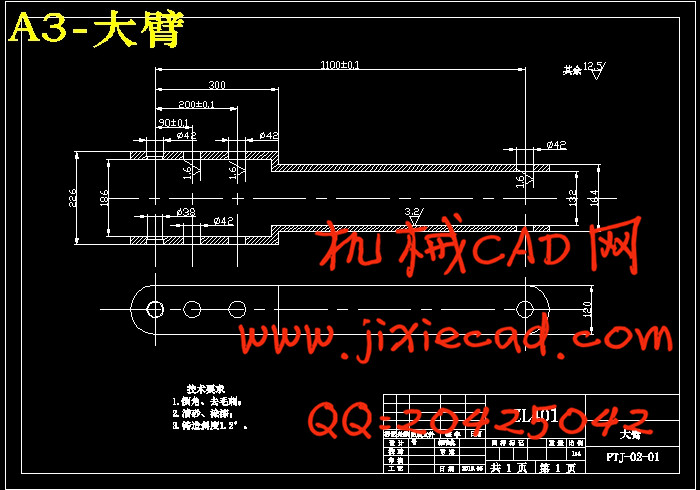
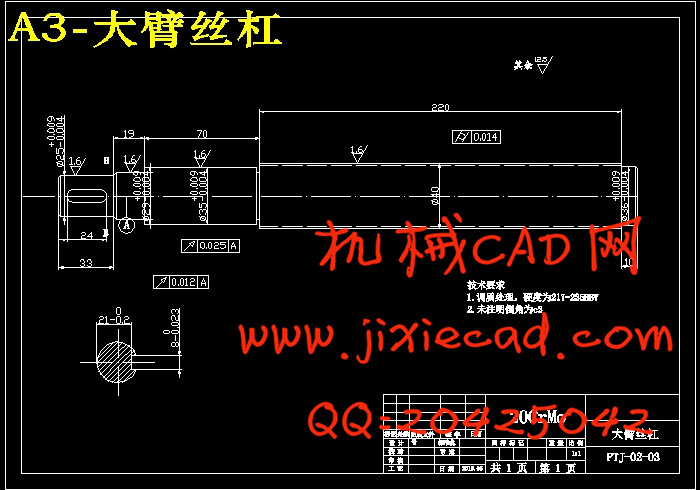
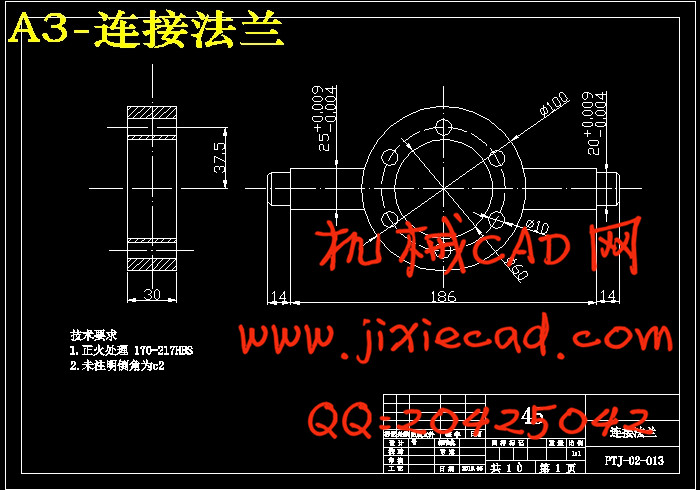
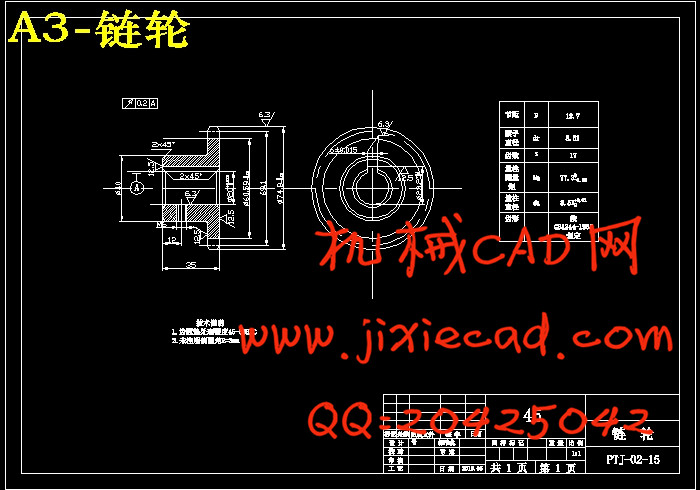
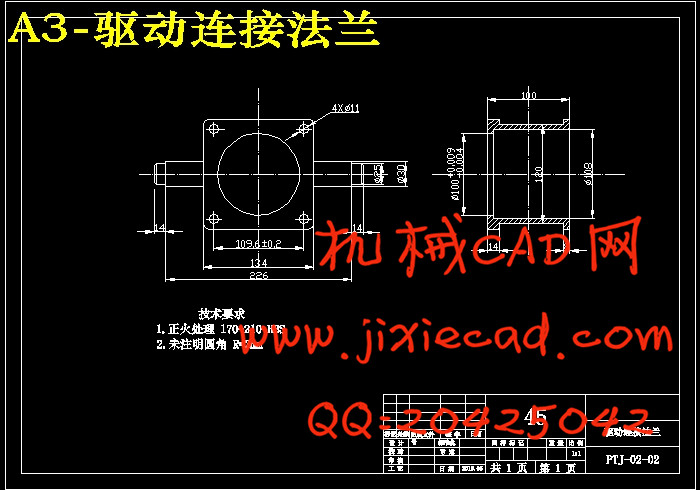
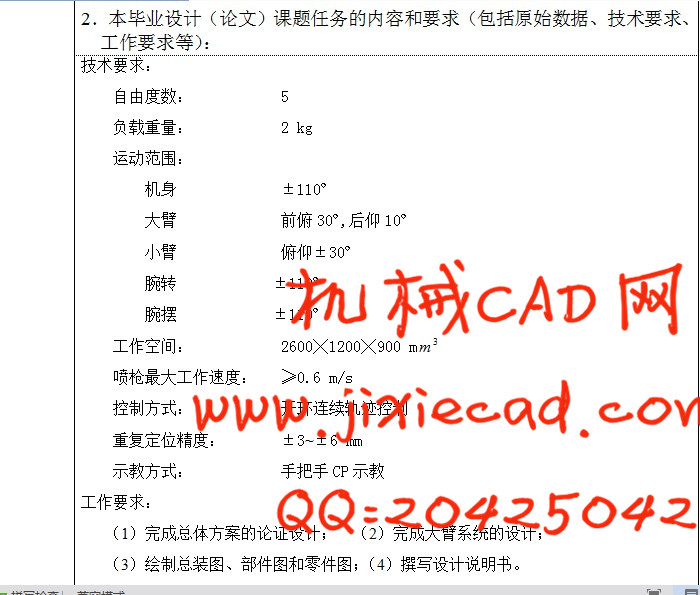
本课题设计了一种经济型喷涂机器人,可应用于汽车车身喷涂等涂装生产线中。该机器人由步进电机驱动,采用关节型坐标结构,具有五个自由度,其工作空间范围为2600×1200×900mm3。机器人机身采用齿轮传动,上下臂用滚珠丝杠和摇杆机构传动,手腕采用链传动和齿轮传动。机器人的控制方式为开环连续轨迹控制,采用手把手CP示教的方法示教。本文的设计重点是喷涂机器人的大臂系统,其大臂系统主要是指机械系统,并不包括控制系统。本设计包括大臂系统材料的选定,截面形状的确定,外形结构的确定和驱动-传动装置的设计计算选择以及弹簧平衡的计算。
关键词 喷涂机器人 大臂系统 步进电机 手把手CP示教 滚珠丝杠
Abstract
This topic has designed one economy spray coating robot, may apply in the automobile body spray coating and so on paints in the production line. This robot by step-by-steps the motor-driven, uses the joint coordinates structure, has five degrees of freedom, its working space scope for 2600×1200×900.The robot fuselage uses the gear drive, on the forearm with the ball bearing guide screw and the rocker mechanism transmission, the skill uses the chain drive and the gear drive. The robot control mode for the split-ring continual trajectory control, uses hand in hand the CP demonstration method demonstration. This article design key point is the spray coating robot big arm system, his/her the big arm system mainly refers to the mechanical system, not including control system. This design including big arm system material designation, section shape determination, contour structure determination and actuation pneumatic actuator design calculation choice as well as spring balance computation.
Keywords Spray coating robot Big-arm system Step motor Teaching by hand Ball screw
目 次
1 引言………………………………………………………………………………… 1
1.1 喷涂机器人的研究与应用……………………………………………………… 1
1.2 喷涂机器人的特点和组成 ………………………………………………………3
1.3 喷涂机器人发展趋势 ……………………………………………………………4
1.4 课题研究意义 ……………………………………………………………………5
2 总体方案设计 ………………………………………………………………………6
2.1 机械结构类型的确定 ……………………………………………………………6
2.2 自由度数的确定 …………………………………………………………………7
2.3 驱动方式的确定 …………………………………………………………………7
2.4 传动方式的确定…………………………………………………………………9
2.5 平衡方式的确定…………………………………………………………………12
2.6 喷涂机器人总体装配示意图……………………………………………………13
3 喷涂机器人大臂设计………………………………………………………………14
3.1 大臂和小臂臂长的设计…………………………………………………………14
3.2 大臂臂身的设计…………………………………………………………………15
3.3 大臂系统设计………………………………………………………………………………19
4 平衡装置的设计……………………………………………………………………25
结论 ……………………………………………………………………………………31
致谢 ……………………………………………………………………………………32
参考文献 ………………………………………………………………………………33
关键词 喷涂机器人 大臂系统 步进电机 手把手CP示教 滚珠丝杠
Abstract
This topic has designed one economy spray coating robot, may apply in the automobile body spray coating and so on paints in the production line. This robot by step-by-steps the motor-driven, uses the joint coordinates structure, has five degrees of freedom, its working space scope for 2600×1200×900.The robot fuselage uses the gear drive, on the forearm with the ball bearing guide screw and the rocker mechanism transmission, the skill uses the chain drive and the gear drive. The robot control mode for the split-ring continual trajectory control, uses hand in hand the CP demonstration method demonstration. This article design key point is the spray coating robot big arm system, his/her the big arm system mainly refers to the mechanical system, not including control system. This design including big arm system material designation, section shape determination, contour structure determination and actuation pneumatic actuator design calculation choice as well as spring balance computation.
Keywords Spray coating robot Big-arm system Step motor Teaching by hand Ball screw
目 次
1 引言………………………………………………………………………………… 1
1.1 喷涂机器人的研究与应用……………………………………………………… 1
1.2 喷涂机器人的特点和组成 ………………………………………………………3
1.3 喷涂机器人发展趋势 ……………………………………………………………4
1.4 课题研究意义 ……………………………………………………………………5
2 总体方案设计 ………………………………………………………………………6
2.1 机械结构类型的确定 ……………………………………………………………6
2.2 自由度数的确定 …………………………………………………………………7
2.3 驱动方式的确定 …………………………………………………………………7
2.4 传动方式的确定…………………………………………………………………9
2.5 平衡方式的确定…………………………………………………………………12
2.6 喷涂机器人总体装配示意图……………………………………………………13
3 喷涂机器人大臂设计………………………………………………………………14
3.1 大臂和小臂臂长的设计…………………………………………………………14
3.2 大臂臂身的设计…………………………………………………………………15
3.3 大臂系统设计………………………………………………………………………………19
4 平衡装置的设计……………………………………………………………………25
结论 ……………………………………………………………………………………31
致谢 ……………………………………………………………………………………32
参考文献 ………………………………………………………………………………33