设计简介
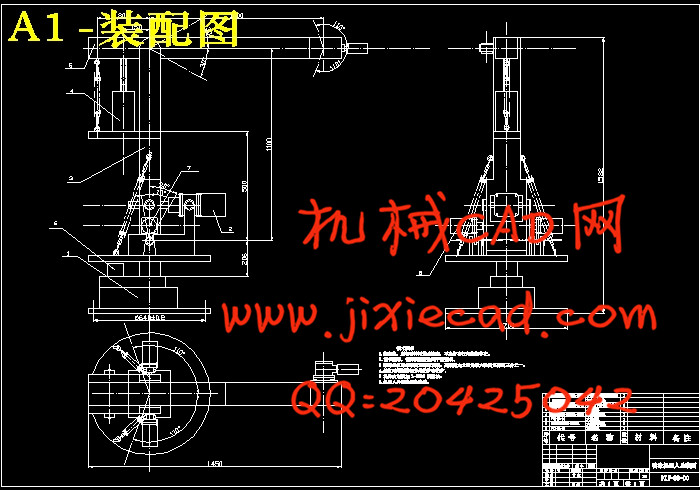
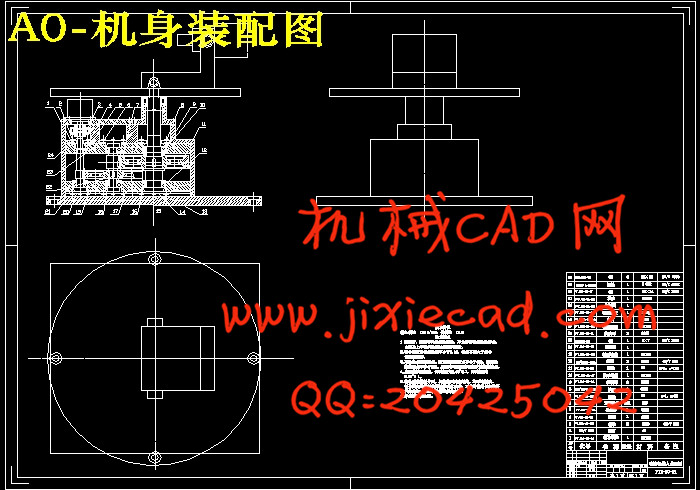
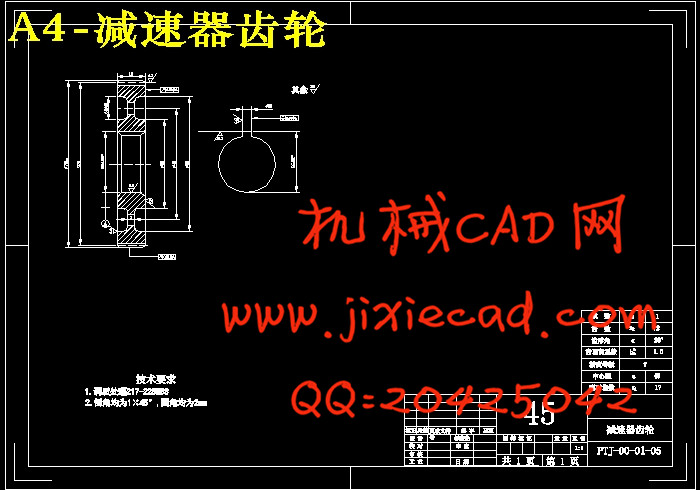
本文主要介绍的是一种喷涂机器人的总体方案论证与机身系统的设计。首先根据技术要求,确定机器人的结构型式为关节型,驱动方式选择步进电机驱动,由工作空间计算出大、小臂尺寸,控制方式为开环连续轨迹控制,手把手示教。其次设计了喷涂机器人的机身系统,设计过程中先选择了步进电机的型号,然后确定传动方式选择齿轮传动带动腰部转动,其中齿轮传动为二级圆柱直齿轮减速传动,并对传动系统中齿轮、轴、轴承进行了设计与校核。
关键词 喷涂机器人 机身系统 齿轮传动 步进电机
Abstract
This paper is an overall introduction in conceptual design and study of painting robot, which demonstrates the design of system in certain robot. Firstly under the technical requirements, choose the structure of the robot as articulated robot, stepper motor as driver. Arm size is decided by calculating the working space. Control mode is open-loop control method for the continuous trajectory control, hands-teaching. This is followed by the design of the painting robot systems. In the design process, first the model of the stepper motor is selected, and then the driving mode is determined that is back rotation is driven by transmission gear. Toothed gearing is double-geared spur gear reduced drive. Gear, shaft, bearings in the transmission system is designed and checked.
Keywords coating robot Fuselage system Gear-driven stepper motor
目 次
1 引言 1
1.1 喷涂机器人的概述 1
1.2 喷涂机器人的应用 1
1.3 喷涂机器人发展趋势 2
1.4 课题研究意义 2
2 喷涂机器人的总体设计 3
2.1 喷涂机器人坐标系的确定 3
2.2 工作空间的设计 4
2.3驱动方式的确定 6
2.4 传动方式的确定 7
2.5平衡方式的选择 7
3 机身的设计 9
3.1 步进电机的选择 9
3.1.1步进机选择的注意事项 9
3.1.2 步进机的选择 9
3.1.3 各轴转速 11
3.1.4 各轴转矩 12
3.1.5 制作参数表 12
3.2 齿轮的设计计算 12
3.2.1高速齿轮的设计与计算 12
3.2.2 低速级齿轮传动的设计计算 17
3.3 轴的结构设计 21
3.3.1 高速轴的结构设计 22
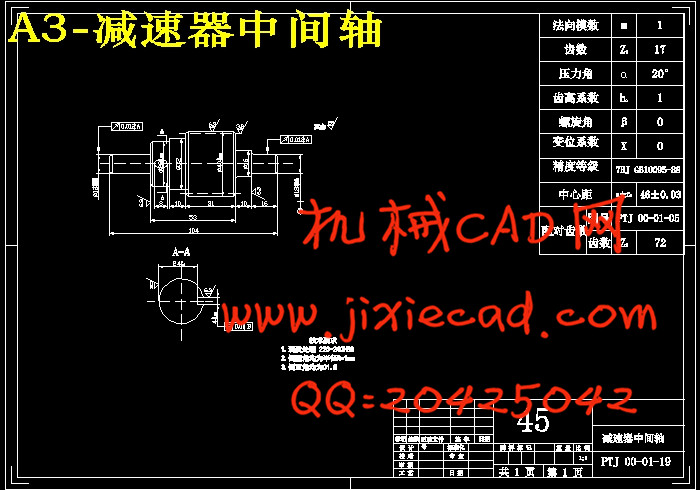
3.3.2 中间轴的结构设计 25
3.3.3 低速轴的结构设计 28
3.4 轴承的校核 31
3.4.1 高速轴的寿命计算 32
3.4.2 中间轴的寿命计算 32
3.4.3 低速轴的寿命计算 32
3.5 腰部内部电缆安装方式 33
结 论 35
致 谢 36
参 考 文 献 37
关键词 喷涂机器人 机身系统 齿轮传动 步进电机
Abstract
This paper is an overall introduction in conceptual design and study of painting robot, which demonstrates the design of system in certain robot. Firstly under the technical requirements, choose the structure of the robot as articulated robot, stepper motor as driver. Arm size is decided by calculating the working space. Control mode is open-loop control method for the continuous trajectory control, hands-teaching. This is followed by the design of the painting robot systems. In the design process, first the model of the stepper motor is selected, and then the driving mode is determined that is back rotation is driven by transmission gear. Toothed gearing is double-geared spur gear reduced drive. Gear, shaft, bearings in the transmission system is designed and checked.
Keywords coating robot Fuselage system Gear-driven stepper motor
目 次
1 引言 1
1.1 喷涂机器人的概述 1
1.2 喷涂机器人的应用 1
1.3 喷涂机器人发展趋势 2
1.4 课题研究意义 2
2 喷涂机器人的总体设计 3
2.1 喷涂机器人坐标系的确定 3
2.2 工作空间的设计 4
2.3驱动方式的确定 6
2.4 传动方式的确定 7
2.5平衡方式的选择 7
3 机身的设计 9
3.1 步进电机的选择 9
3.1.1步进机选择的注意事项 9
3.1.2 步进机的选择 9
3.1.3 各轴转速 11
3.1.4 各轴转矩 12
3.1.5 制作参数表 12
3.2 齿轮的设计计算 12
3.2.1高速齿轮的设计与计算 12
3.2.2 低速级齿轮传动的设计计算 17
3.3 轴的结构设计 21
3.3.1 高速轴的结构设计 22
3.3.2 中间轴的结构设计 25
3.3.3 低速轴的结构设计 28
3.4 轴承的校核 31
3.4.1 高速轴的寿命计算 32
3.4.2 中间轴的寿命计算 32
3.4.3 低速轴的寿命计算 32
3.5 腰部内部电缆安装方式 33
结 论 35
致 谢 36
参 考 文 献 37