设计简介
摘要
本论文的内容是气动肌肉并联系统设计,该系统主要由上下两层平台组成。气动肌肉是一种具有类似人类肌肉输出特性的柔性执行器,它是根据人类肌肉的运动原理设计而成。气动肌肉既具有清洁、质量轻、价格低、易维护等气动元件的优点,与气缸相比,还具有较大的功率/体积比和功率/质量比,并且有良好的柔顺性。
本文所讲述的并联系统可用在舰船上,作用是在颠簸的外部环境中提供一个稳定的平台,以适应科研或者生活的要求。以气动肌肉并联关节为基础的所开发的平台,具有价格低、结构简单、功率/质量比高等优点。
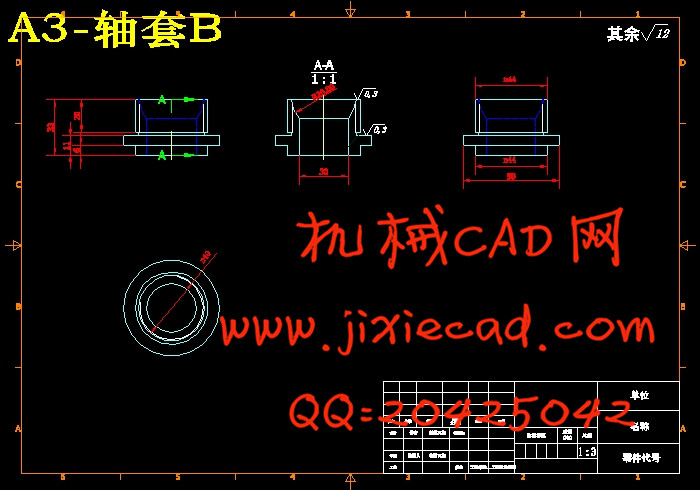
本文介绍了基于气动肌肉并联关节的系统设计,主要包括平台的机械结构设计、组成系统的元件的选型与设计、气动元件的选型与设计、高速开关阀的控制策略等几方面的内容。绘制出了组成系统的各个零件图和装配图并简单介绍了系统的控制策略。
由于时间有限,对气动肌肉的控制方法、整个系统的特性等问题还需要进一步的研究。
关键词: 气动肌肉,并联系统
Abstract
This paper is about the design of a parallel system driven by pneumatic muscles.This system is mainly made up of a upper platform and a lower onePneumatic muscle is a new type of flexible pneumatic actuator with the same output characteristics as human muscle, and is designed according to motion principle of human muscle. It has not only the advantages of cleanliness, lightweight, cheapness and easy maintenance possessed by pneumatic actuators, but also the special feature of higher power/weight ratio and power/volume ratio as well as good compliance.
The parallel system that we talk about can be used on the ship. It can keep balance although the ship is swaying. So it’s very useful for scientific research and our daily life. If we make a parallel manipulator with Pneumatic Muscle, it can have the advantages of cheapness and high power/weight ratio.
This paper mainly discusses the mechanical structure design of the system the selection and design of the system components and pneumatic components, and the fast switching valve control method. At last, we get the parts drawings and setting drawings and make a brief introduction of the control about the system.
Owing to time constraints, the pneumatic muscle control method, and the characteristic of the system still need further study.
Key Words: pneumatic muscle, parallel manipulator
目 录
目 录 1
中文摘要 1
英文摘要 1
1 绪 论 1
1.1 课题研究背景及意义 1
1.1.1气动肌肉并联系统的研究意义 1
1.1.2 研究现状 2
1.2 系统组成的重要元件 3
1.2.1气动肌肉 3
1.2.1.1气动肌肉简介 3
1.2.1.2气动肌肉的优缺点: 4
1.2.1.3气动肌肉的发展历史 5
1.2.1.4气动肌肉的实际应用 5
1.2.2高速开关阀 8
1.2.2.1高速开关阀特性介绍 8
1.2.2.2高速开关阀脉宽调制控制 9
1.3文章结构 9
2 系统结构设计 10
2.1系统机械结构 10
2.1.1整体设计思路 10
2.1.2气动肌肉的选型 10
2.1.3系统中气动肌肉的连接 11
2.1.4系统外形的设计 11
2.1.5球铰在系统中的应用 12
2.1.6中心立柱 13
2.1.6.1系统下平台中心立柱: 13
2.1.6.2运动模拟平台立柱: 13
2.1.7系统上下层的连接 14
2.1.8系统上层旋转角度的验算 14
2.1.9防护罩的选择 15
2.2 传感器的选择与安装 16
2.2.1位移传感器 16
2.2.2 压力传感器 18
2.2.3倾角传感器 18
2.3 气动结构的设计与选型 20
2.3.1气源处理单元(三联件) 20
2.3.2阀的选择 20
2.3.3阀块的设计 21
2.4 小结 23
3 系统控制策略 24
3.1概述 24
3.2数据采集卡PCL-711B 25
3.2.1 概述 25
3.2.2 开关与跳线 25
3.2.3 I/O地址选择 26
3.2.4 D/A范围选择 26
3.2.5 接线柱引脚分配 27
3.1.6 信号连接 28
3.1.7 模拟输入连接 28
3.1.8 模拟输出连接 28
3.1.9 数字信号连接 29
3.3 高速开关阀的控制电路(PWM波发生电路) 30
3.3.1 概述 30
3.2.2 PWM波发生电路的组成芯片 31
3.3.3 电路模块介绍 38
3.2.4 电路图 42
3.2.5 电路输入值 42
3.2.6 电路输出值 43
3.2.7 时序图 44
3.4系统控制仿真 46
3.5小结 47
总 结 48
致 谢 49
参考文献 50