设计简介
摘要
机械手是在机械化、自动化生产过程中发展起来的一种新型装置。在现代化生产过程中,机械手被广泛应用于自动生产线中,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机
械手能更好地实现与机械化和自动化的有机结合。
工业生产中应用机械手,可以提高劳动生产率,保证产品质量,减
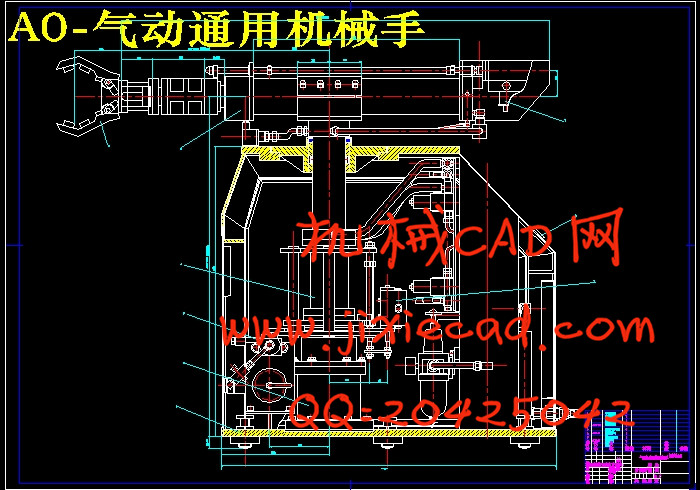
轻工人劳动强度,实现生产过程自动化。本文以“气动通用机械手驱动系统设计”为题目简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式、气动技术的特点,及国内外的发展状况。本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构,对手臂的伸缩、升降、回转气缸进行了尺寸设计和校核。
关键词 :工业机器人, 自动化,机械手,气动
Abstract
Manipulator is a new type of equipment which developed from the process of mechanical and automation. In modern produce process, manipulator is widely applied into automatic assembly lines, the development and production of robot has to been an emerging technology in high technical domain, it promotes the development of manipulator, and makes t realize the combination of mechanical and automation better.
The application of manipulator in industry, can increase the efficiency of labor, ensure the quality of production, reduce the labor intensity, realize the automation of produce process. In this paper, the title of “the design of drive system to pneumatic general manipulator” gives a brief introduction to concept of industrial robot, composition and classification of manipulator, degrees of freedom and the form of coordinate of manipulator, features of pneumatic technology and the state of development in and out. This paper gives an overall designing to manipulator, determined the degrees of freedom and the form of coordinate, and technical parameters. Meanwhile, designed the configuration of gripping and wrist, calculated the torque of wrist when turned and driving torque of rotary cylinder. Designed the configuration of manipulator’s arm, and have a size designing and checking to arm’s cylinders of the telescopic, lifting and rotary.
Keywords: industrial robots, automation, manipulator, pneumatic
目录机械手是在机械化、自动化生产过程中发展起来的一种新型装置。在现代化生产过程中,机械手被广泛应用于自动生产线中,机器人的研制和生产已成为高技术领域内迅速发展起来的一门新兴技术,它更加促进了机械手的发展,使得机
械手能更好地实现与机械化和自动化的有机结合。
工业生产中应用机械手,可以提高劳动生产率,保证产品质量,减
轻工人劳动强度,实现生产过程自动化。本文以“气动通用机械手驱动系统设计”为题目简要介绍了工业机器人的概念,机械手的组成和分类,机械手的自由度和坐标形式、气动技术的特点,及国内外的发展状况。本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构,对手臂的伸缩、升降、回转气缸进行了尺寸设计和校核。
关键词 :工业机器人, 自动化,机械手,气动
Abstract
Manipulator is a new type of equipment which developed from the process of mechanical and automation. In modern produce process, manipulator is widely applied into automatic assembly lines, the development and production of robot has to been an emerging technology in high technical domain, it promotes the development of manipulator, and makes t realize the combination of mechanical and automation better.
The application of manipulator in industry, can increase the efficiency of labor, ensure the quality of production, reduce the labor intensity, realize the automation of produce process. In this paper, the title of “the design of drive system to pneumatic general manipulator” gives a brief introduction to concept of industrial robot, composition and classification of manipulator, degrees of freedom and the form of coordinate of manipulator, features of pneumatic technology and the state of development in and out. This paper gives an overall designing to manipulator, determined the degrees of freedom and the form of coordinate, and technical parameters. Meanwhile, designed the configuration of gripping and wrist, calculated the torque of wrist when turned and driving torque of rotary cylinder. Designed the configuration of manipulator’s arm, and have a size designing and checking to arm’s cylinders of the telescopic, lifting and rotary.
Keywords: industrial robots, automation, manipulator, pneumatic
第一章 绪论
1.1选题背景及机械手概述..................................1
1.2机械手的组成和分类....................................2
1.3国内外发展状况........................................5
1.4课题的提出及主要任务..................................6
第二章 机械手的设计方案
2.1机械手的坐标形式与自由度..............................8
2.2机械手的手部结构方案设计..............................8
2.3机械手的手腕结构方案设计..............................8
2.4机械手的手臂结构方案设计..............................8
2.5机械手的驱动方案设计..................................8
2.6机械手的主要参数......................................9
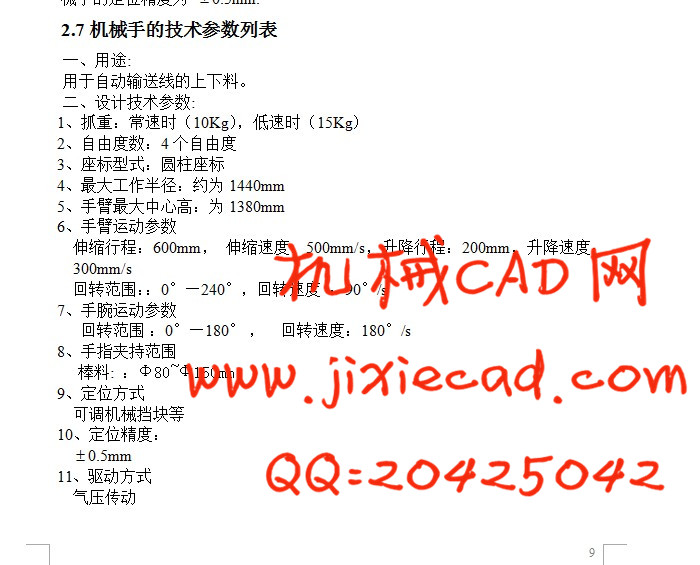
2.7机械手的技术参数列表..................................9
第三章 手部结构设计
3.1夹持式手部结构........................................10
3.2手指的形状和分类......................................10
3.3设计时考虑的几个问题..................................10
3.4手部夹紧气缸的设计....................................10
第四章 手腕结构设计
4.1手腕的自由度..........................................14
4.2手腕转动时所需的驱动力矩..............................14
4.3手腕的驱动力矩计算....................................15
4.4回转气缸的驱动力矩计算................................17
4.5手腕回转缸的尺寸设计及其校核..........................17
第五章 手臂伸缩,升降,回转气缸的设计与校核
5.1手臂伸缩部分尺寸设计与校核............................20
5.2手臂升降部分尺寸设计与校核............................23
5.3手臂回转部分尺寸设计与校核............................23
第六章 总结.............................................26
致谢....................................................27
参考文献................................................28