设计简介
摘 要
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手是工业自动控制领域中经常用到的一种能够自动抓取、操作的装置,多用于自动生产线、自动机的上下料、数控设备的自动换刀装置中。由于气动技术是以压缩空气为介质,以气源为动力的能源传递技术,其工作可靠性高、使用寿命长、对环境没有污染,所以在机械手的驱动系统中常采用气动技术。气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。
因此,对气动机械手的研究具有重要的实际价值。
关键词:机械手,自动化,气动.
ABSTRACT
Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role.
Industrial automatic control manipulator is often used in the field of a kind of automatic crawl, operation of the device used in automatic production line, automata up-down material, nc equipment automatic change device. The pneumatic technology is compressed air as medium, powered by gas transmission technology, its energy, high reliability, long service life, no pollution to environment and so on the drive system using manipulator in pneumatic technology. Pneumatic manipulator as a manipulator, it has simple structure, light weight, rapid and stable, reliable, energy-saving and polluting the environment advantages and widely application.
Therefore, the study of pneumatic manipulator has important practical value.
Key words: manipulator. Automation. air cylinder.
目录
第一章、绪论
1.1 机械手概述……………………………………………......1
1.2 机械手的组成和分类……………………………………..2
1.2.1 机械手的组成…………………………………………..2
1.2.2 机械手的分类…………………………………………..5
1.3 国内外发展状况…………………………………………..6
1.4 课题的提出及主要任务…………………………………..8
1.4.1 课题的提出……………………………………………..8
1.4.2 课题的主要任务………………………………………..9
第二章、机械手的设计方案
2.1 机械手的座标型式与自由度……………………………10
2.2 机械手的手部结构方案设计……………………………10
2.3 机械手的手腕结构方案设计……………………………10
2.4 机械手的手臂结构方案设计……………………………11
2.5 机械手的驱动方案设计…………………………………11
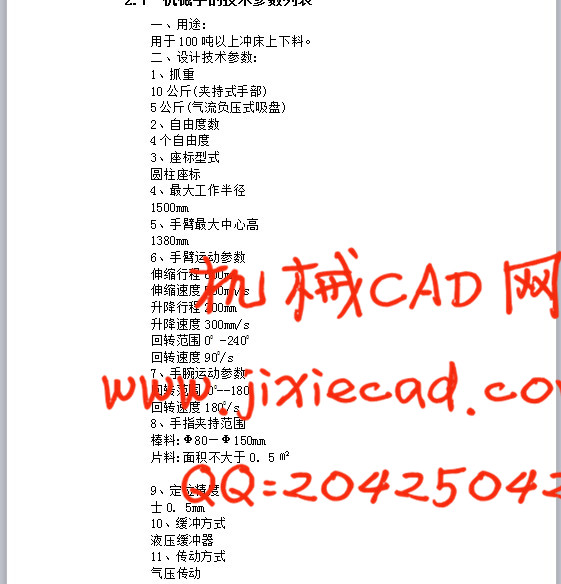
2.6 机械手的主要参数………………………………………11
2.7 机械手的技术参数列表…………………………………12
第三章、手部结构设计
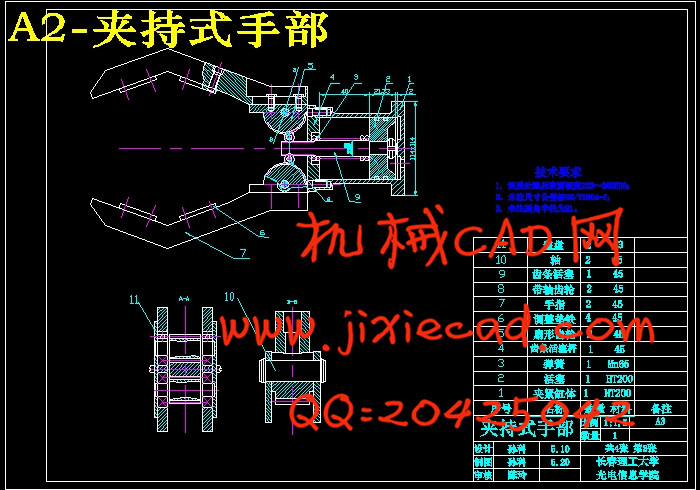
3.1 夹持式手部结构…………………………………………15
3.1.1 手指的形状和分类……………………………………15
3.1.2 设计时考虑的几个问题………………………………15
3.1.3 手部夹紧气缸的设计…………………………………16
第四章、手腕结构设计
4.1 手腕的自由度……………………………………………20
4.2 手腕的驱动力矩的计算…………………………………20
4.2.1 手腕转动时所需的驱动力矩…………………………20
第五章、手臂结构设计
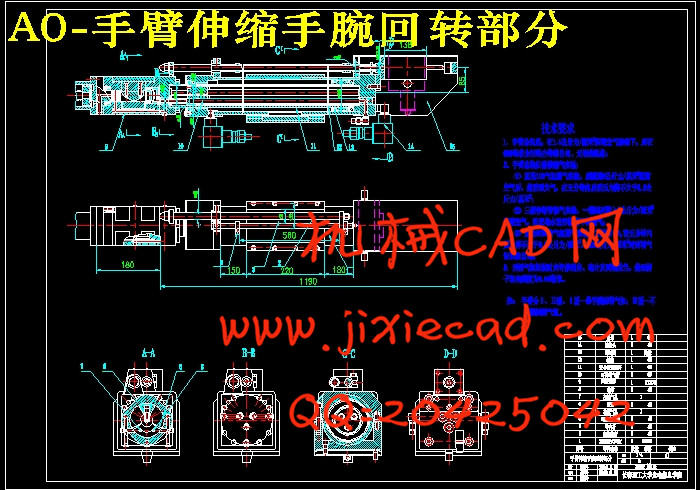
5.1 手臂伸缩与手腕回转部分........................25
5.1.1 结构设计………………………………………………25
5.1.2 导向装置………………………………………………26
5.1.3 手臂伸缩驱动力的计算………………………………26
5.2 手臂升降和回转部分............................27
5.2.1 结构设计………………………………………………27
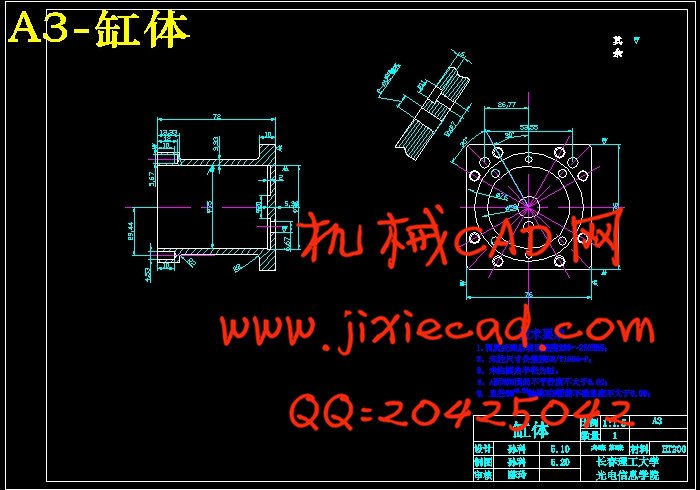
5.3 手臂伸缩气缸的设计............................28
结 论……………………………………………………………31
参考文献…………………………………………………………..32
致 谢…………………………………………………………..34
机械手是一种模仿人体上肢运动的机器,它能按照预定要求输送工种或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。
工业机械手是工业自动控制领域中经常用到的一种能够自动抓取、操作的装置,多用于自动生产线、自动机的上下料、数控设备的自动换刀装置中。由于气动技术是以压缩空气为介质,以气源为动力的能源传递技术,其工作可靠性高、使用寿命长、对环境没有污染,所以在机械手的驱动系统中常采用气动技术。气动机械手作为机械手的一种,它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境等优点而被广泛应用。
因此,对气动机械手的研究具有重要的实际价值。
关键词:机械手,自动化,气动.
ABSTRACT
Manipulator is a kind of imitation of the upper body movement machine, it can be scheduled according to request type or holds the automation tool operation of technical equipment, industrial automation, promote the production of industrial production of the further development plays an important role.
Industrial automatic control manipulator is often used in the field of a kind of automatic crawl, operation of the device used in automatic production line, automata up-down material, nc equipment automatic change device. The pneumatic technology is compressed air as medium, powered by gas transmission technology, its energy, high reliability, long service life, no pollution to environment and so on the drive system using manipulator in pneumatic technology. Pneumatic manipulator as a manipulator, it has simple structure, light weight, rapid and stable, reliable, energy-saving and polluting the environment advantages and widely application.
Therefore, the study of pneumatic manipulator has important practical value.
Key words: manipulator. Automation. air cylinder.
目录
第一章、绪论
1.1 机械手概述……………………………………………......1
1.2 机械手的组成和分类……………………………………..2
1.2.1 机械手的组成…………………………………………..2
1.2.2 机械手的分类…………………………………………..5
1.3 国内外发展状况…………………………………………..6
1.4 课题的提出及主要任务…………………………………..8
1.4.1 课题的提出……………………………………………..8
1.4.2 课题的主要任务………………………………………..9
第二章、机械手的设计方案
2.1 机械手的座标型式与自由度……………………………10
2.2 机械手的手部结构方案设计……………………………10
2.3 机械手的手腕结构方案设计……………………………10
2.4 机械手的手臂结构方案设计……………………………11
2.5 机械手的驱动方案设计…………………………………11
2.6 机械手的主要参数………………………………………11
2.7 机械手的技术参数列表…………………………………12
第三章、手部结构设计
3.1 夹持式手部结构…………………………………………15
3.1.1 手指的形状和分类……………………………………15
3.1.2 设计时考虑的几个问题………………………………15
3.1.3 手部夹紧气缸的设计…………………………………16
第四章、手腕结构设计
4.1 手腕的自由度……………………………………………20
4.2 手腕的驱动力矩的计算…………………………………20
4.2.1 手腕转动时所需的驱动力矩…………………………20
第五章、手臂结构设计
5.1 手臂伸缩与手腕回转部分........................25
5.1.1 结构设计………………………………………………25
5.1.2 导向装置………………………………………………26
5.1.3 手臂伸缩驱动力的计算………………………………26
5.2 手臂升降和回转部分............................27
5.2.1 结构设计………………………………………………27
5.3 手臂伸缩气缸的设计............................28
结 论……………………………………………………………31
参考文献…………………………………………………………..32
致 谢…………………………………………………………..34