设计简介
汽车工业用装装卸机械手结构设计
摘 要
本设计如今,随着工业技术几十年的发展,机械手在工业生产中得到了广泛的应用,它可以代替工人来进行各种循环单调,危险,以及高疲劳强度的工作,从而提高生产效率和质量,降低了生产作业中的安全隐患。
机械手主要由手部和运动机构组成。手部是用来抓住工件或工具的部件,根据被抓住工件的形状、尺寸、重量、材料和作业要求而有多种结构形式。机械手配件运动机构,使手部完成各种转动、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
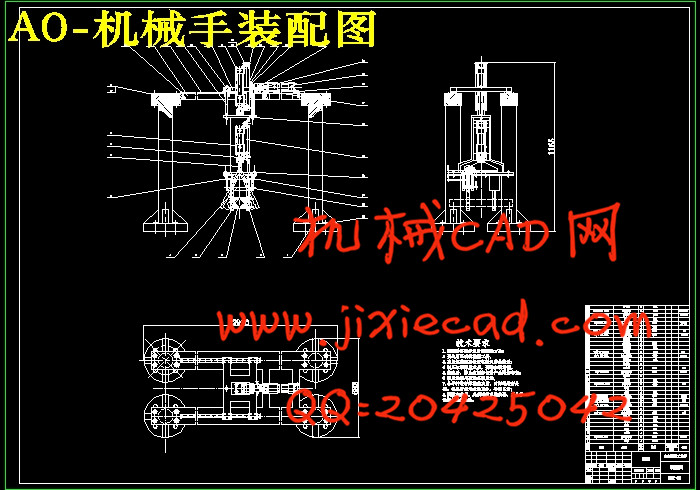
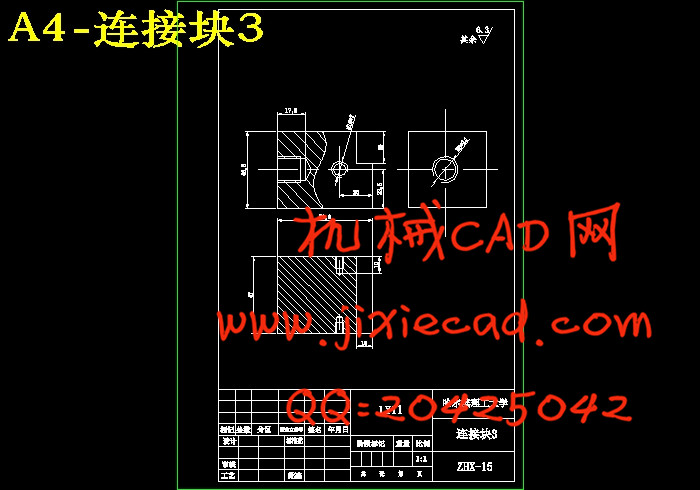
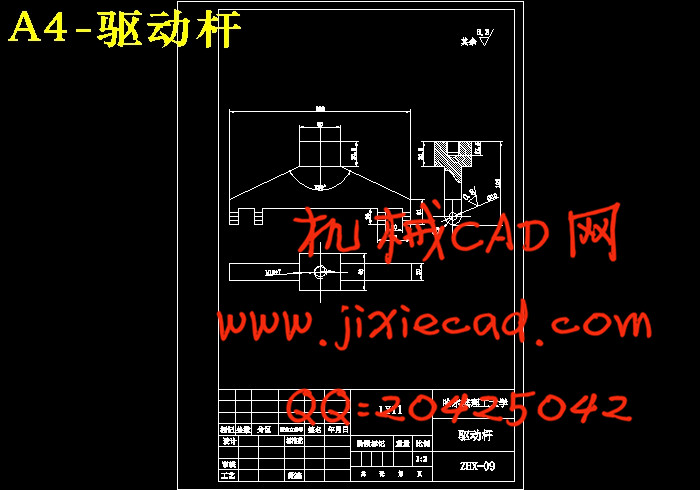
本文介绍了过对曲轴搬运机械手的结构设计,详细讨论了机械手的手抓、手臂、机身等主要部件的设计与选择,并给出了所需要的参数和计算。
最后通过本次设计,将大学所学的知识进行了巩固和应用,提高了动手和动脑的能力。
关键词 机械手;液压驱动;液压缸;PLC
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 机械手的概念 1
1.2 机械手的简史 1
1.3 机械手的组成 2
1.3.1 执行机构 2
1.3.2 驱动机构 2
1.3.3 控制机构 2
1.4 机械手的生产应用简述 2
第2章 机械手的设计 4
2.1 机械手的总体设计 4
2.1.1 机械手的总体结构类型 4
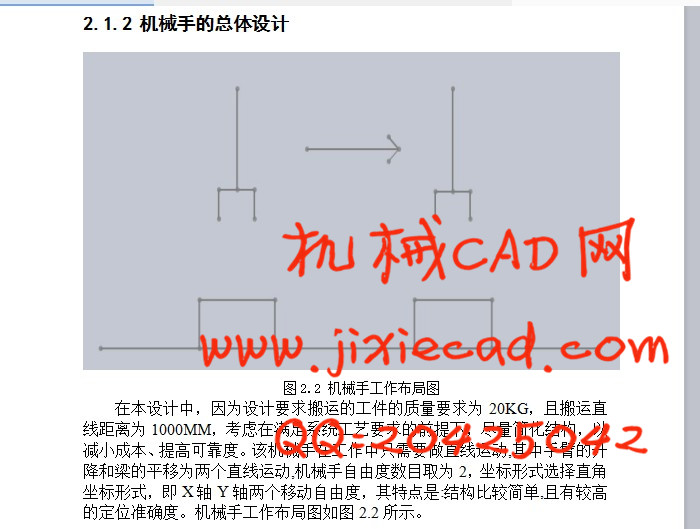
2.1.2 机械手的总体设计 5
2.2 机械手的手部设计 5
2.2.1 手部概述 5
2.2.2 手部的设计方案 6
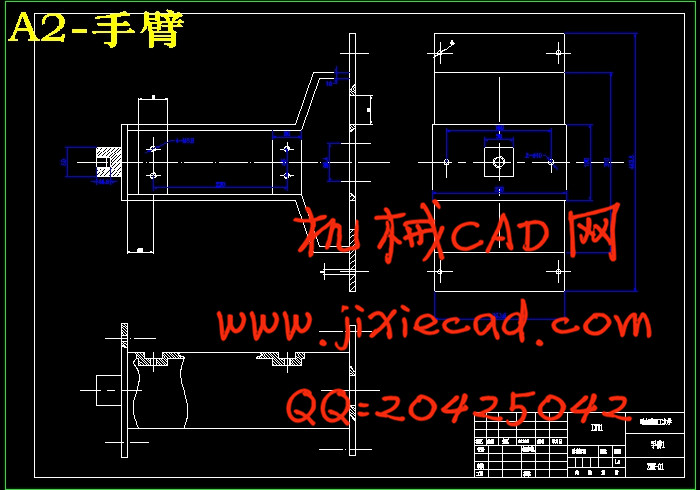
2.3 机械手的手臂设计 7
2.3.1 手臂概述 7
2.3.2 手臂的设计 8
2.4 机械手的驱动系统设计 9
2.4.1 驱动系统概述 9
2.4.2 驱动系统的选择原则 9
2.4.3 机器人液压驱动系统 10
2.4.4 驱动系统的设计方案 10
第3章 液压系统设计与计算 11
3.1 确定液压系统基本方案 11
3.2 拟定液压执行元件运动控制回路 12
3.3 液压源系统的设计 12
3.4 绘制液压系统图 12
3.5 确定液压系统的主要参数 13
3.6 选择液压元件 17
3.7 液压系统性能的验算 18
第4章 机械手控制系统的设计 19
4.1 机械手控制系统硬件设计 19
4.2 机械手的作业流程 19
4.3 机械手操作面板布置 20
4.4 控制器的选型 20
4.5 控制系统原理分析 21
4.6 PLC外部接线设计 22
结论 23
致谢 24
参考文献 25
摘 要
本设计如今,随着工业技术几十年的发展,机械手在工业生产中得到了广泛的应用,它可以代替工人来进行各种循环单调,危险,以及高疲劳强度的工作,从而提高生产效率和质量,降低了生产作业中的安全隐患。
机械手主要由手部和运动机构组成。手部是用来抓住工件或工具的部件,根据被抓住工件的形状、尺寸、重量、材料和作业要求而有多种结构形式。机械手配件运动机构,使手部完成各种转动、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
本文介绍了过对曲轴搬运机械手的结构设计,详细讨论了机械手的手抓、手臂、机身等主要部件的设计与选择,并给出了所需要的参数和计算。
最后通过本次设计,将大学所学的知识进行了巩固和应用,提高了动手和动脑的能力。
关键词 机械手;液压驱动;液压缸;PLC
Auto loading and unloading manipulator structure design
Abstract
Now, with industrial technology develops several decades, robots industrial production is in a wide range of applications, it can replace workers for doing various acyclic monotonically, risk, and high fatigue strength work, so as to improve the work efficiency and quality and to reduce the production operation of security lapses.
Manipulator is mainly consisted of hand and movement mechanism. The hand is used to catch work-piece or tool parts, according to the shape of the workpiece is caught, size, weight, materials and operational requirement a variety of structure. Manipulator accessories movement mechanism, make hand finish all kinds of rotating, mobile or composite motion to achieve the specified action, change the position of the object caught with gesture.
This paper introduces the structure of the crankshaft carrying manipulator, and discusses the design of the manipulator hand grasp, arm, airframe etc., the main components of the design and selection, and gives the necessary parameters and calculation.
Finally through this design, we consolidate and application the knowledge of university, and improve the ability about ion of the hand and the brain coordination.
Key words: manipulator; the hydraulic pressure drive; hydraulic cylinder;PLC
Abstract
Now, with industrial technology develops several decades, robots industrial production is in a wide range of applications, it can replace workers for doing various acyclic monotonically, risk, and high fatigue strength work, so as to improve the work efficiency and quality and to reduce the production operation of security lapses.
Manipulator is mainly consisted of hand and movement mechanism. The hand is used to catch work-piece or tool parts, according to the shape of the workpiece is caught, size, weight, materials and operational requirement a variety of structure. Manipulator accessories movement mechanism, make hand finish all kinds of rotating, mobile or composite motion to achieve the specified action, change the position of the object caught with gesture.
This paper introduces the structure of the crankshaft carrying manipulator, and discusses the design of the manipulator hand grasp, arm, airframe etc., the main components of the design and selection, and gives the necessary parameters and calculation.
Finally through this design, we consolidate and application the knowledge of university, and improve the ability about ion of the hand and the brain coordination.
Key words: manipulator; the hydraulic pressure drive; hydraulic cylinder;PLC
目 录
摘 要 I
Abstract II
第1章 绪论 1
1.1 机械手的概念 1
1.2 机械手的简史 1
1.3 机械手的组成 2
1.3.1 执行机构 2
1.3.2 驱动机构 2
1.3.3 控制机构 2
1.4 机械手的生产应用简述 2
第2章 机械手的设计 4
2.1 机械手的总体设计 4
2.1.1 机械手的总体结构类型 4
2.1.2 机械手的总体设计 5
2.2 机械手的手部设计 5
2.2.1 手部概述 5
2.2.2 手部的设计方案 6
2.3 机械手的手臂设计 7
2.3.1 手臂概述 7
2.3.2 手臂的设计 8
2.4 机械手的驱动系统设计 9
2.4.1 驱动系统概述 9
2.4.2 驱动系统的选择原则 9
2.4.3 机器人液压驱动系统 10
2.4.4 驱动系统的设计方案 10
第3章 液压系统设计与计算 11
3.1 确定液压系统基本方案 11
3.2 拟定液压执行元件运动控制回路 12
3.3 液压源系统的设计 12
3.4 绘制液压系统图 12
3.5 确定液压系统的主要参数 13
3.6 选择液压元件 17
3.7 液压系统性能的验算 18
第4章 机械手控制系统的设计 19
4.1 机械手控制系统硬件设计 19
4.2 机械手的作业流程 19
4.3 机械手操作面板布置 20
4.4 控制器的选型 20
4.5 控制系统原理分析 21
4.6 PLC外部接线设计 22
结论 23
致谢 24
参考文献 25