设计简介
球面SCARA机器人机械部分设计
摘要:球面SCARA机器人课题来源于学院的实验室。研究的主要内容是设计一个三自由度的机器人,用于实践教学。对三个自由度的传动系统进行设计时,要保证规定的动作范围、速度和精度。球面SCARA机器人是一个三自由度的关节型装置。具有体积小,传动原理简单等优点,被广泛应用于各个行业。
对于本课题,着重研究的是球形工件表面定位的SCARA机器人机械部分的设计。机械部分结构设计包括确定机器人的外形尺寸和工作空间,拟定机器人各环节的总体传动方案和主要技术参数的确定,以及三个自由度轴的校核。所设计的机器人具有移动方便、抓取范围大、刚性好、位置精度高、运行平稳的特点。整个系统能满足实验的要求,结构简单,运动可靠,装卸方便,便于维修、调整,能够基本满足设计的要求。在设计过程中尽量把零件选为标准件和通用件,以节约制造成本。
关键词:SCARA机器人;电机;结构设计
Mechanical Structure Design of Spherical SCARA Robot
Abstract: Spherical SCARA robot comes from the Institute of Laboratory project.
The main content is to design a three degrees of freedom robot for practice teaching.
The design of the three degrees of freedom the drive system should ensure the scope of the provisions of the action, speed and accuracy. Spherical three-DOF SCARA robot is a joint-type devices. It is small and simple driving principle, so it is widely used in various industries.
For this issue, focus is on the spherical surface of the SCARA robot positioning mechanical design. Mechanical design includes determining the size and shape of the robot work space, the overall development of all sectors of the robot drive program and determining the main technical parameters, and three degrees of freedom axis calibration. A mobile robot designed to easy move, capture range, good rigidity, high precision location, stable characteristics. The system can meet the requirements of experiments, simple structure, reliable movement, easy handling, easy maintenance, adjustment, can basically meet the design requirements. In the design process, we should try our best to select standard parts and common parts, to save manufacturing costs.
Key words: SCARA robot; motor; Structural design
目 录
1前言……………………………………………………………………………… 1
1.1课题来源与技术要求分析…………………………………………………… 1
1.2国内外发展及研究现状……………………………………………………… 1
1.3研究目的……………………………………………………………………… 2
1.4设计内容及思路……………………………………………………………… 2
2球面SCARA机器人机械结构设计……………………………………………… 4
2.1运动方案及主要技术参数的拟定…………………………………………… 4
2.1.1方案拟定…………………………………………………………………… 5
2.1.2脉冲当量和传动比的确定………………………………………………… 6
2.2各传动系统设计与校核……………………………………………………… 7
2.2.1第一自由度电机校核……………………………………………………… 8
2.2.2第一自由度同步带传动设计……………………………………………… 9
2.2.3第一自由度谐波减速器选择……………………………………………… 10
2.2.4第二自由度电机校核……………………………………………………… 11
2.2.5第二自由度谐波减速器选择……………………………………………… 13
2.2.6第三自由度电机校核……………………………………………………… 13
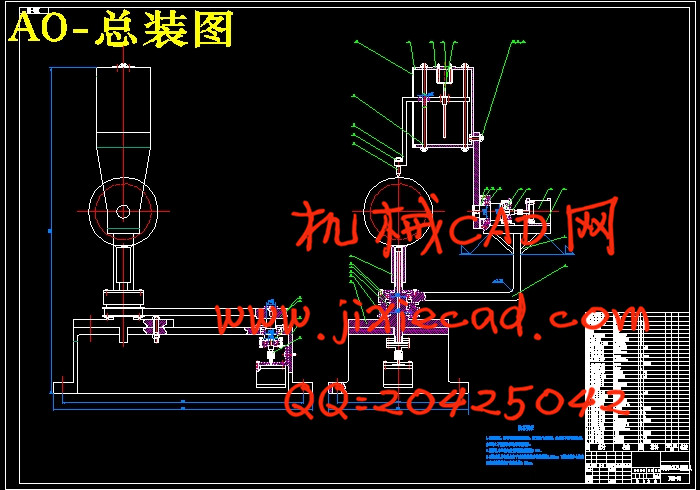
2.2.7球面SCARA机器人外形图………………………………………………… 15
3 Pro/E软件简介………………………………………………………………… 16
4工业机器人运行时应采取的安全措施………………………………………… 18
4.1安全要求……………………………………………………………………… 18
4.2实施方法……………………………………………………………………… 18
5结 论…………………………………………………………………………… 19
参考文献…………………………………………………………………………… 20
致 谢…………………………………………………………………………… 21
摘要:球面SCARA机器人课题来源于学院的实验室。研究的主要内容是设计一个三自由度的机器人,用于实践教学。对三个自由度的传动系统进行设计时,要保证规定的动作范围、速度和精度。球面SCARA机器人是一个三自由度的关节型装置。具有体积小,传动原理简单等优点,被广泛应用于各个行业。
对于本课题,着重研究的是球形工件表面定位的SCARA机器人机械部分的设计。机械部分结构设计包括确定机器人的外形尺寸和工作空间,拟定机器人各环节的总体传动方案和主要技术参数的确定,以及三个自由度轴的校核。所设计的机器人具有移动方便、抓取范围大、刚性好、位置精度高、运行平稳的特点。整个系统能满足实验的要求,结构简单,运动可靠,装卸方便,便于维修、调整,能够基本满足设计的要求。在设计过程中尽量把零件选为标准件和通用件,以节约制造成本。
关键词:SCARA机器人;电机;结构设计
Mechanical Structure Design of Spherical SCARA Robot
Abstract: Spherical SCARA robot comes from the Institute of Laboratory project.
The main content is to design a three degrees of freedom robot for practice teaching.
The design of the three degrees of freedom the drive system should ensure the scope of the provisions of the action, speed and accuracy. Spherical three-DOF SCARA robot is a joint-type devices. It is small and simple driving principle, so it is widely used in various industries.
For this issue, focus is on the spherical surface of the SCARA robot positioning mechanical design. Mechanical design includes determining the size and shape of the robot work space, the overall development of all sectors of the robot drive program and determining the main technical parameters, and three degrees of freedom axis calibration. A mobile robot designed to easy move, capture range, good rigidity, high precision location, stable characteristics. The system can meet the requirements of experiments, simple structure, reliable movement, easy handling, easy maintenance, adjustment, can basically meet the design requirements. In the design process, we should try our best to select standard parts and common parts, to save manufacturing costs.
Key words: SCARA robot; motor; Structural design
目 录
1前言……………………………………………………………………………… 1
1.1课题来源与技术要求分析…………………………………………………… 1
1.2国内外发展及研究现状……………………………………………………… 1
1.3研究目的……………………………………………………………………… 2
1.4设计内容及思路……………………………………………………………… 2
2球面SCARA机器人机械结构设计……………………………………………… 4
2.1运动方案及主要技术参数的拟定…………………………………………… 4
2.1.1方案拟定…………………………………………………………………… 5
2.1.2脉冲当量和传动比的确定………………………………………………… 6
2.2各传动系统设计与校核……………………………………………………… 7
2.2.1第一自由度电机校核……………………………………………………… 8
2.2.2第一自由度同步带传动设计……………………………………………… 9
2.2.3第一自由度谐波减速器选择……………………………………………… 10
2.2.4第二自由度电机校核……………………………………………………… 11
2.2.5第二自由度谐波减速器选择……………………………………………… 13
2.2.6第三自由度电机校核……………………………………………………… 13
2.2.7球面SCARA机器人外形图………………………………………………… 15
3 Pro/E软件简介………………………………………………………………… 16
4工业机器人运行时应采取的安全措施………………………………………… 18
4.1安全要求……………………………………………………………………… 18
4.2实施方法……………………………………………………………………… 18
5结 论…………………………………………………………………………… 19
参考文献…………………………………………………………………………… 20
致 谢…………………………………………………………………………… 21