设计简介
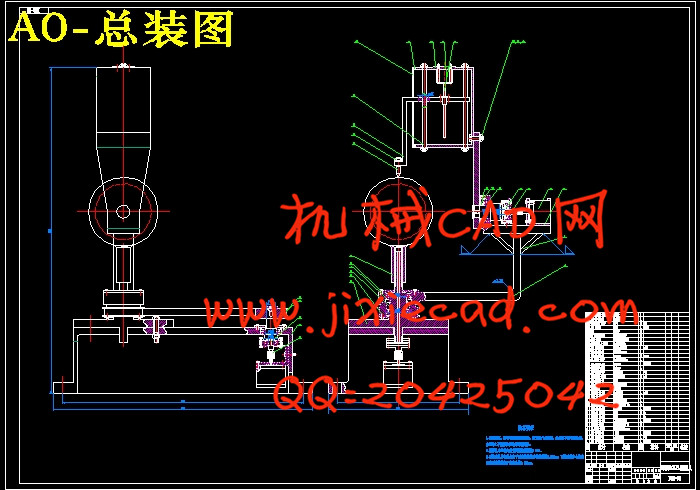
球面SCARA机器人总体及控制系统设计
摘要:球面SCARA机器人是一种具有三个自由度的关节型装置。机器人的体积小,传动原理简单,所以被广泛应用于电子电器行业,家用电器行业,精密机械行业等领域。球面机器人着重对球形工件表面定位控制系统设计进行了探究,确定了机电一体化的设计方案,把机械结构和PLC控制合理的融合在一起。其中,机器人的大臂,小臂,顶针都由步进电机驱动,采用三菱FX2N系列的PLC作为控制器。最终达到安全,稳定,准确的完成操作。
首先,简单介绍了课题来源,国内外机器人的现状及发展趋势。
其次,对SCARA球面机器人进行了总体设计,然后根据动作要求对机器人控制系统的硬件及软件进行设计。还要对编制的PLC程序在GX simulator上进行仿真。
最后,总结全文,展望了机器人的发展前景。本课题是机电结合较为紧密的实用性项目,文中对PLC的应用、机械总体结构进行了一些探究,对球面机器人的设计与研制方面积累了一些经验。
关键词:SCARA机器人;步进电机;PLC;运动控制
The Design of Overall and Control system of Spherical SCARA Robot
Abstract: A Spherical SCARA robot is an articulated device that composed of three degrees of freedom. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric industry and exact mechanism. This paper focuses on the control system design of the SCARA robot used in positioning on spherical surface and confirms the design of a project that mechanics and electrics are used together. The PLC and mechanical are combined agreeably in the coordinating actions of the manipulator. Among this equipment, the robot arm, forearm, thimble are completed by the stepper motors. Meanwhile, the writer adopts the MITSUBISHI’s FX series of PLC as controller. Ultimately achieve the completion of operation security, stability and accurately.
Firstly, I introduce the resource, and review the development of robot inside and abroad.
Secondly,I complete the overall design of Spherical SCARA Robot, and then according to manipulate requirements to work out hardware and software design of the robot control system. But also for the preparation of the PLC program on the GX-simulator to simulate.
Finally, I summarize the whole thesis, and look out the prospects of development of the robot. The subject is a practical item where the mechanics and electrics are integrated very closely. I have made a necessary discussion in the application of PLC, the design of mechanical overall structure. Some experiences are accumulated in the design and development of spherical robot.
Key words: SCARA robot; Stepper motor; PLC; Motion- control.
目 录
1 前言 1
1.1 课题的来源 1
1.2 国内外现状及发展趋势 2
1.3 设计的思路及解决的主要问题 2
2 球面SCARA机器人总体方案设计 4
2.1 运动方案及主要技术参数的拟定 4
2.2方案拟定 5
3 机器人控制的功能、组成和分类 7
3.1机器人控制系统的特点 7
3.2对机器人控制系统的一般要求 7
3.3机器人控制系统分类 8
3.4 机器人的控制方式 8
4 球面SCARA机器人的控制系统 9
4.1 控制要求 9
4.2 控制方案的确定 9
4.3器件的工作原理 9
4.3.1.步进电机 9
4.3.2.步进电机驱动器 10
4.3.3.传感器: 11
4.3.4.PLC控制器: 12
4.4 控制系统硬件和软件的设计 12
4.4.1 控制系统硬件的设计: 12
4.4.2 控制系统软件的设计 12
5 PLC简介 18
5.1 PLC的发展历程 18
5.2 PLC的构成 18
5.3 CPU的构成 18
5.4 I/O模块 19
5.5 电源模块 19
5.6 PLC系统的其它设备 19
5.7 PLC的通信联网 20
6 结论 21
参考文献 22
致谢 23
附录 24
摘要:球面SCARA机器人是一种具有三个自由度的关节型装置。机器人的体积小,传动原理简单,所以被广泛应用于电子电器行业,家用电器行业,精密机械行业等领域。球面机器人着重对球形工件表面定位控制系统设计进行了探究,确定了机电一体化的设计方案,把机械结构和PLC控制合理的融合在一起。其中,机器人的大臂,小臂,顶针都由步进电机驱动,采用三菱FX2N系列的PLC作为控制器。最终达到安全,稳定,准确的完成操作。
首先,简单介绍了课题来源,国内外机器人的现状及发展趋势。
其次,对SCARA球面机器人进行了总体设计,然后根据动作要求对机器人控制系统的硬件及软件进行设计。还要对编制的PLC程序在GX simulator上进行仿真。
最后,总结全文,展望了机器人的发展前景。本课题是机电结合较为紧密的实用性项目,文中对PLC的应用、机械总体结构进行了一些探究,对球面机器人的设计与研制方面积累了一些经验。
关键词:SCARA机器人;步进电机;PLC;运动控制
The Design of Overall and Control system of Spherical SCARA Robot
Abstract: A Spherical SCARA robot is an articulated device that composed of three degrees of freedom. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric industry and exact mechanism. This paper focuses on the control system design of the SCARA robot used in positioning on spherical surface and confirms the design of a project that mechanics and electrics are used together. The PLC and mechanical are combined agreeably in the coordinating actions of the manipulator. Among this equipment, the robot arm, forearm, thimble are completed by the stepper motors. Meanwhile, the writer adopts the MITSUBISHI’s FX series of PLC as controller. Ultimately achieve the completion of operation security, stability and accurately.
Firstly, I introduce the resource, and review the development of robot inside and abroad.
Secondly,I complete the overall design of Spherical SCARA Robot, and then according to manipulate requirements to work out hardware and software design of the robot control system. But also for the preparation of the PLC program on the GX-simulator to simulate.
Finally, I summarize the whole thesis, and look out the prospects of development of the robot. The subject is a practical item where the mechanics and electrics are integrated very closely. I have made a necessary discussion in the application of PLC, the design of mechanical overall structure. Some experiences are accumulated in the design and development of spherical robot.
Key words: SCARA robot; Stepper motor; PLC; Motion- control.
目 录
1 前言 1
1.1 课题的来源 1
1.2 国内外现状及发展趋势 2
1.3 设计的思路及解决的主要问题 2
2 球面SCARA机器人总体方案设计 4
2.1 运动方案及主要技术参数的拟定 4
2.2方案拟定 5
3 机器人控制的功能、组成和分类 7
3.1机器人控制系统的特点 7
3.2对机器人控制系统的一般要求 7
3.3机器人控制系统分类 8
3.4 机器人的控制方式 8
4 球面SCARA机器人的控制系统 9
4.1 控制要求 9
4.2 控制方案的确定 9
4.3器件的工作原理 9
4.3.1.步进电机 9
4.3.2.步进电机驱动器 10
4.3.3.传感器: 11
4.3.4.PLC控制器: 12
4.4 控制系统硬件和软件的设计 12
4.4.1 控制系统硬件的设计: 12
4.4.2 控制系统软件的设计 12
5 PLC简介 18
5.1 PLC的发展历程 18
5.2 PLC的构成 18
5.3 CPU的构成 18
5.4 I/O模块 19
5.5 电源模块 19
5.6 PLC系统的其它设备 19
5.7 PLC的通信联网 20
6 结论 21
参考文献 22
致谢 23
附录 24