设计简介
摘 要
机械手与机械人是二十世纪五十年代以后,伴随着电子技术特别是电子计算机的广泛应用,而迅速发展起来的一门新兴技术。它综合应用了机械、电子、自动控制等先进技术以及物理,生物等学科的基础知识实现机械化与自动化的有机结合。它不仅在工业生产上,而且对宇宙开发,海洋开发,军事工程和生物医学等方面都起着推动的作用,因而日益受到世界许多国家政府,学术团队和科学技术人员的重视,毫无疑问,这门技术将具有广阔的发展前景。
在生产现代化领域里,材料的搬运,机床的上下料,整机的装配等是个薄弱环节。在机械工业部门,这些工序的费用占全部加工费用三分之二以上,而且绝大多数的事故发生在这些工序,自动上下料装置和工业机械手就是为实现这些工序的自动化而采用的。
通用机械手在工业生产中的应用只有二十来年的历史,这种装置在国外得到相当重视,到七十年代,其品种和数量都有很大的发展,并且研制了具有各种感觉器官的机器人。
关键字:机械手 液压缸 PLC 自由度 控制阀
Abstract
Machinery and mechanical hand is the 20th century after the 1950s, accompanied by electronic technology, especially the extensive application of computers and the rapid development of a new and emerging technologies. It comprehensive application of the machinery, electronics, automatic control, and other advanced technology, and physics, biology and other disciplines of basic knowledge of mechanization and automation to achieve the organic integration. It is not only in industrial production, but also the development of the universe, ocean development, military engineering and biomedical and other aspects of the role of promoting the play, thus increasing by many countries in the world government, academic team and the importance of science and technology, there is no doubt that This portal technology will have broad prospects for development.
In the field of modern production, material handling, machine tools expected from top to bottom with two of the assembly is a weak link. In the industrial machinery sector, these processes of the total cost of processing more than two thirds of the cost, but the majority of the accidents occurred in these processes, automatic device from top to bottom and industrial machinery is in hand to achieve the automation of these processes used.
Universal Manipulator in the industrial production of only 20 coming year history of such devices in foreign countries have attached considerable importance to the 1970s, has great variety and quantity of development and has developed a variety of sensory organ of the so-called machine People.
Keyword: manipulator hydraulic cylinder PLC freedom control valve
2 总体方案分析
2.1 总体方案分析
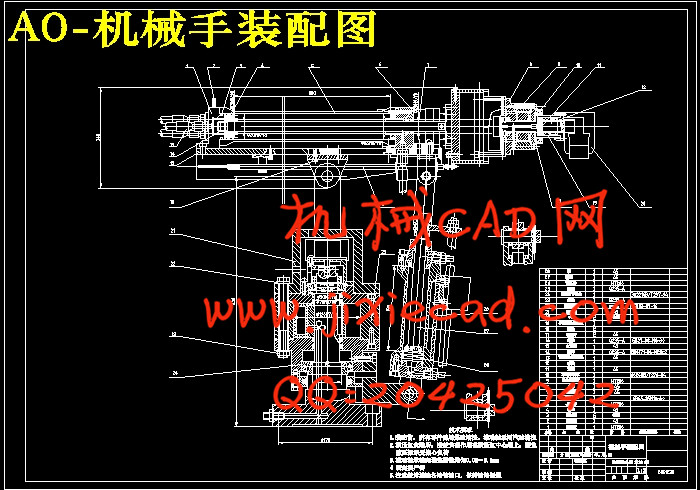
由设计内容可知,本次设计所确定的机械手的整体结构为球坐标式机械手,此机械手要实现从传送带到设备的上下料过程。传送带移动方向与设备上所夹持的工件方向垂直。因此手臂动作为摆动或者转动,手爪的动作为伸缩和松夹。由于此机械手的动作要求放置不同的工件,所以实现上下料过程也要求手腕能旋转动作。多种方案分析
通过以上分析,这里初选三个方案,各方案如下:
方案一:机身的旋转,采用电动机驱动实现,大手臂的俯仰也采用电动机驱动实现,小手臂的伸缩用伸缩缸实现,手腕的回转用电动机实现。
方案二:机身的旋转,采用电动机驱动实现,大手臂的俯仰也采用电动机驱动实现,小手臂的伸缩用齿轮齿条实现,手腕的回转用电动机实现。
方案三:机身的旋转,采用摆动液压缸驱动实现,大手臂的俯仰采用摆动液压缸驱动实现,小手臂的伸缩用伸缩缸实现,手腕的回转用摆动液压缸。
2.2 方案的确定
通过方案一,方案二和方案三的比较分析可知,方案一从功能上讲可以满足条件,但电动机的造价太高,不太经济。方案二中也存在上述的问题。同时齿轮齿条的驱动精度太低,在抓取工件时定位精度不够准确,且结构大而复杂。方案三中,由液压缸来完成的部分,不仅驱动力大且结构也相对简单,虽然摆动缸结构尺寸大但输出转矩大,进行优化设计,从而得出方案三最佳,并最终确定此次的设计方案方案三,方案如下:机身旋转、手腕转动,均采用摆动缸来控制,手臂的伸缩用伸缩缸控制,手爪的松夹用夹紧缸来控制。
2.3 动作原理
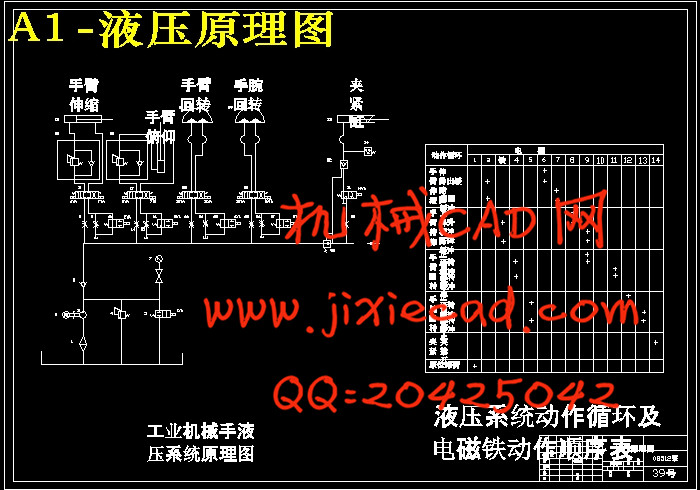
本次设计是液压驱动,电气控制。机械手的各个动作是由液压缸来驱动的,其动作过程是由液压缸的各个动作运动至终点时压合行程开关,将行程开关的机械运动通过PLC转化为电磁阀得电和失电,后由电磁阀控制各油路的通断,以实现各液压缸的相应运动,从而控制机械手的各个动作。2.4 工业机械手的传动方案设计
2.4.1 传动方案设计
按工业机械手的不同形式及其组合情况,其活动范围的图形也是不同的,基本上可分为四种运动形式;直角坐标式机械手、圆柱坐标式机械手、球坐标式机械手、关节式机械手。根据设计要求,选用球坐标型式。
由于液压传动具有以下几个优点:
(1) 压力高,可实现较大的驱动力,机构可做的较小,紧凑。
(2) 无级变速,定位精度高,可实现任意中间位置的停止。系统固有震动频率小,压力、容量调节容易。
(3) 重量小,惯性小,可做到经常快速且无冲击的变速和换向,容易控制,动作平稳,迟滞小。
2.4.2 工业机械手主要技术参数
机械手的主要技术参数有抓重、自由度、坐标形式、工作行程(或转角)、工作速度和定位精度、手指夹持范围、驱动源等。(1) 抓重(又称臂力) 额定抓取重量或额定负载,单位㎏。
抓重是指机械手在正常运行时所能抓取或搬运工件的最大重量,本设计要求抓取工件的重量为30kg,考虑到手臂结构强度等因素,通常安全系数k在2~3范围内选用。
(2) 自由度和坐标形式
整机、手臂和手腕等运动共有四个自由度,坐标型式为球坐标。
机械手的四个自由度分别为机身回转,手臂俯仰,伸缩及手腕回转四个自由度,以满足上下料动作的要求。
(3) 工作行程范围
工作行程范围是指臂部,腕部,整个机械手直线移动距离或回转角度的范围。对于通用机械手,为保证一定的通用性,一般手臂回转行程范围应尽可能大一些,选择0°~200°(实际使用为180°),俯仰范围60°。手臂伸缩行程及工件半径要适当,若伸缩行程大,工件半径也较大,手臂伸缩也较长,偏重力矩,转动惯性了较大,刚性降低,易振动,定位精度验难于保证,手臂伸缩行程在500~1000毫米范围内选取,据设计要求选取上料机械手伸缩范围0~600毫米,手臂升降范围为0~600毫米。
(4) 工作速度
工作速度是指机械手最大的运动速度,运动的大小与机械手的驱动方式、定位方式、抓重大小和行程距离有关。因此,手臂的运动速度应根据生产节拍时间的长短,生产过程的平稳性,定位精度的要求来确定。影响机械手动作快慢的两个主要运动是:手臂的伸缩和回转运动一般应用的机械手移动速度通常在200~300毫米/秒,回转角度在一圈5S左右。
(5) 定位精度
定位精度即位置精度,位置精度的高低与位置控制方式,机械手运动部件的精度和刚度、抓重、运动速度等有关。目前机械手大多采用点位控制,采用固定挡块控制时,可达到较高的位置精度(±0.5mm或更高)。
(6) 工件为截面200mm×200mm的方形工件。
目 录
摘 要 I
Abstract II
目 录 III
1 绪论 1
1.1 机械手的概述 1
1.2 机械手的组成与分类 1
1.2.1 机械手的组成 1
1.2.2 机械手的分类 2
1.3 机械手的应用简况、应用意义及发展趋势 3
1.3.1 机械手发展概况 3
1.3.2 机械手的组成 4
1.3.3 上下料机械手的使用必要性 5
1.4 机械手在生产中的作用 5
2 总体方案分析 7
2.1 总体方案分析 7
2.2 方案的确定 7
2.3 动作原理 7
2.4 工业机械手的传动方案设计 8
2.4.1 传动方案设计 8
2.4.2 工业机械手主要技术参数 8
3 手部的设计 9
3.1 手部结构 9
3.2 手爪的计算与分析 10
3.2.1 手爪执行液压缸工作压力计算 10
3.2.2 手爪的夹持误差分析与计算 11
4 腕部的设计 11
4.1 腕部结构 11
4.2 腕部回转力矩的计算 11
5 手臂的设计 14
5.1 手臂伸缩液压缸的设计计算 14
5.1.1 手臂作水平伸缩直线运动驱动力的计算 14
5.1.2 手臂垂直升降运动驱动力的计算 14
5.1.3 确定液压缸的结构尺寸 15
5.1.4 活塞杆的计算 16
5.1.5 液压缸端盖的联接方式与强度计算 17
5.2 手臂俯仰运动的设计计算 19
5.2.1 手臂俯仰时所需的驱动力矩 19
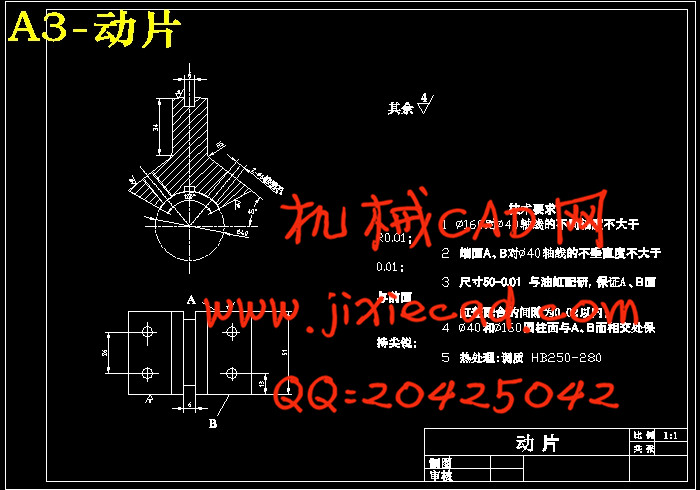
5.2.2 缸盖联接螺钉计算和动片联接螺钉计算 20
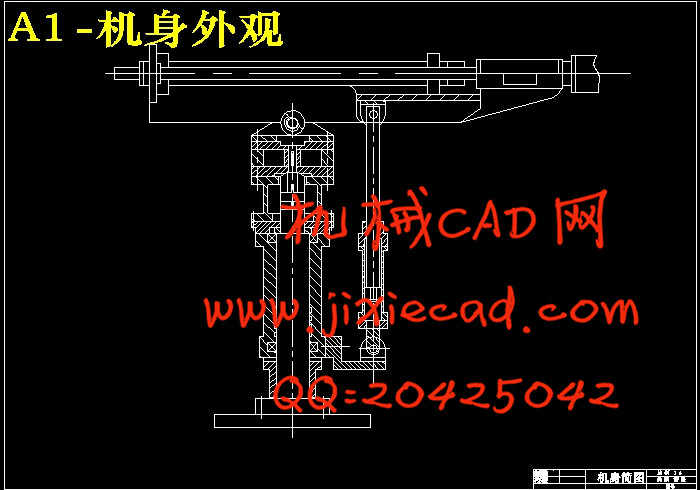
机身设计 21
6.1 机身结构的计算 21
6.2 机身设计时应注意的事项 23
7 机械手液压系统工作原理 23
7.1 能量转化简图 23
7.2 液压系统的组成 24
7.3 液压传动系统机械手的特点 24
7.4 油缸泄漏问题与密封装置 25
7.4.1 活塞式油缸的泄漏与密封 25
7.4.2 回转油缸的泄漏与密封 25
7.5 液压系统传动方案的确定 26
7.5.1 各液压缸的换向回路 26
7.5.2 调速方案 26
7.5.3 减速缓冲回路 27
7.5.4 系统安全可靠性 27
结 论 30
致 谢 31
参考文献 32