设计简介
摘 要
随着科学技术的发展和自动化生产线在企业产品生产中的广泛应用,机械手作为自动化生产线的重要组成部分也得到了长足的发展和进步。尤其是随着机械结构的优化,气动、液压技术的成熟,控制元件的发展和控制方式的不断改进和创新,机械手的动作精确性、控制灵活性和工作可靠性得到了明显的改善。机械手的出现在减轻工人劳动强度和难度、提高工作效率和质量、降低生产成本上做出了突出贡献,机械手的发展在企业的发展和创收上起到了举足轻重的作用。本课题是一个机、电结合较为紧密的实用性项目,文中对电气的应用、机械结构的设计、控制方法的选择等方面进行了必要的探讨。最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键字:机械手;液压驱动;电气;自动;控制元件
ABSTRACT
With the development of science and technology,automated production line is widely used in enterprise production, the manipulator as an important part of the automated production line also got considerable development and progress. Especially with the optimization of mechanical structures, pneumatic, hydraulic technology matures, control elements development and control of continuous improvement and innovation, the action of the robot accuracy, control, flexibility and reliability has been a marked improvement .Manipulator made outstanding contributions to reduce labor intensity and difficulty, to improve work efficiency and quality, reduce production costs, Robot development has played a pivotal role in the development of enterprises and income-generating. This issue is a mechanical, electrical, combined with the more closely the usefulness of project, The necessary discussion on the application of electrical, mechanical structure design, choice of control methods etc. Finally, summarizes the full-text, pointed out that the manipulator’s improvement measures, the application prospect and development direction.
Key Words: Manipulator;The hydraulic pressure drive;Electric;Auto;Control components
目 录
摘要……………………………………...........……………………………………………..I
Abstract……………………………………………...……..........……….………….……..II
第1章 绪论.............................................................................................................. ..........1
1.1 工业机器人(机械手)的概述....................................................................................1
1.1.1 工业机器手的发展 ..........................................................................................1
1.1.2 工业机器人的分类..........................................................................................2
1.1.3 工业机械手的应用..........................................................................................2
1.2国内外发展现状.........................................................................................................3
1.3 本课题的预期结果....................................................................................................4
第2章 机械手的总体设计.............................................................................................5
2.1 设计要求....................................................................................................................5
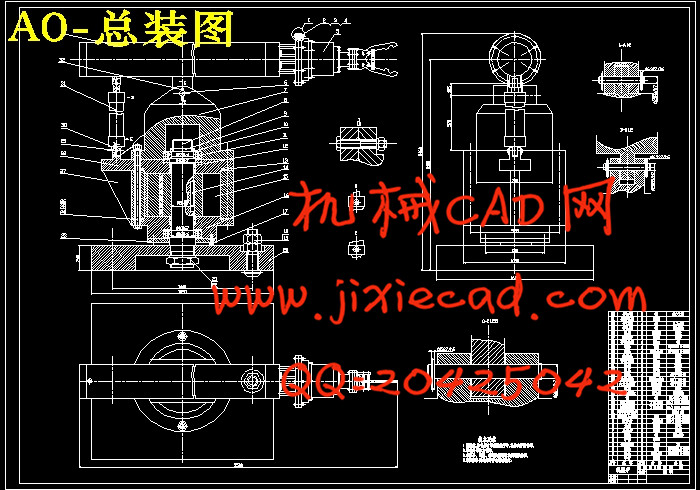
2.2 机械手总体设计方案................................................................................................5
2.2.1 机械手的组成及各部分关系....................................................................................5
2.2.2 总体设计任务 ..................................................................................................5
2.2.3 总体方案拟定..................................................................................................7
2.3 本章小结....................................................................................................................9
第3章机械手结构的设计分析....................................................................................10
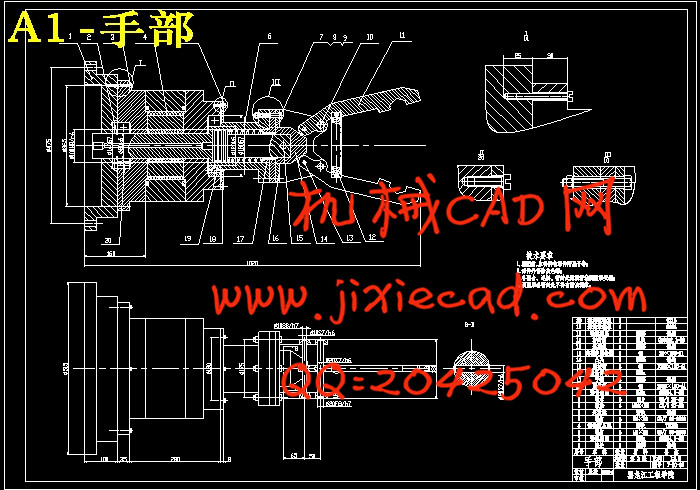
3.1 末端操作器的设计分析..........................................................................................10
3.2 末端操作器的概述..................................................................................................10
3.1.1 末端操作器结构的设计分析........................................................................10
3.1.2 末端操作器的设计........................................................................................10
3.3 手腕的设计..............................................................................................................11
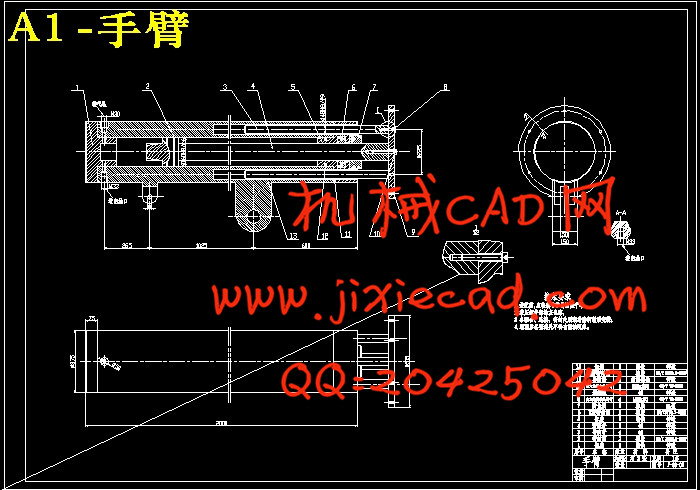
3.4 手臂的设计..............................................................................................................12
3.5 机身和机座的设计..................................................................................................13
3.6 本章小结..................................................................................................................................15
第4章 机械手各部件载荷及结构尺寸计算..........................................................17
4.1 设计要求分析..........................................................................................................17
4.2 手指夹紧机构的及尺寸设计..................................................................................17
4.2.1 手指夹紧机构载荷的计算............................................................................17
4.3 手臂伸缩机构的及尺寸的确定..............................................................................22
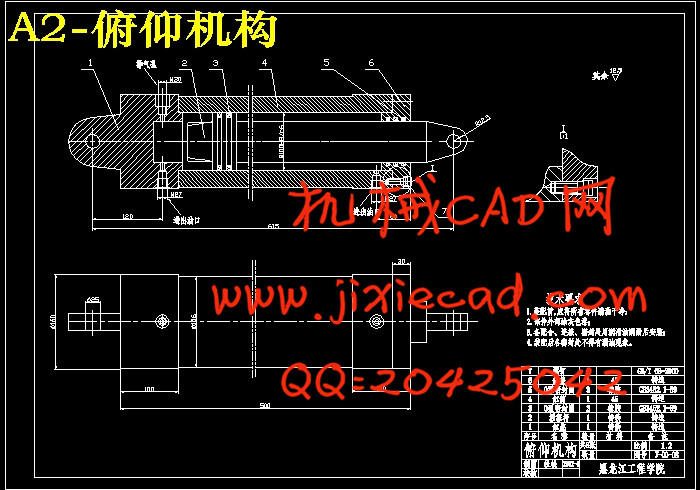
4.4 手臂俯仰机构结构尺寸的确定..............................................................................24
4.5 手腕摆动机构的确定..............................................................................................24
4.6 机身摆动机构的确定..............................................................................................24
4.7 强度校核..................................................................................................................24
4.8 弯曲稳定性校核......................................................................................................25
4.9 本章小结..................................................................................................................26
第5章 液压系统的设计...............................................................................................27
5.1 液压缸或液压马达所需流量的确定......................................................................27
5.1.1 液压缸工作时所需流量................................................................................27
5.2 液压马达工作时的流量..........................................................................................28
5.3 液压缸或液压马达主要零件的结构材料及技术要求..........................................28
5.3.1 缸体................................................................................................................28
5.3.2 缸盖................................................................................................................29
5.3.3 活塞................................................................................................................29
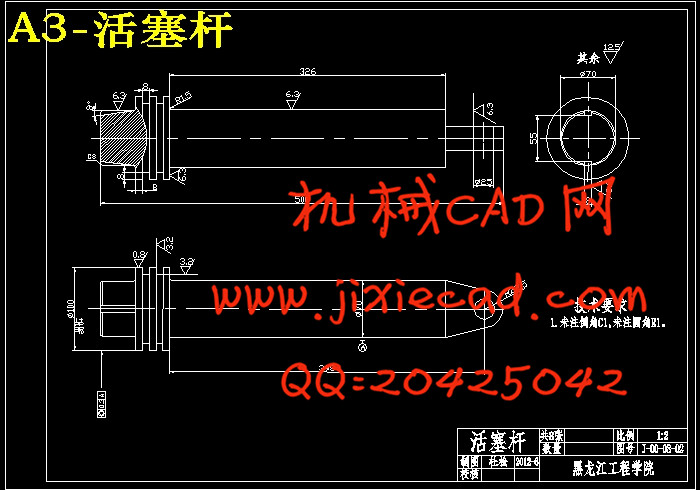
5.3.4 活塞杆............................................................................................................29
5.3.5 液压缸的缓冲装置........................................................................................29
5.3.6 液压缸的排气装置........................................................................................30
5.4 制定基本方案..........................................................................................................30
5.4.1 基本回路的选择............................................................................................30
5.5 液压元件的选择......................................................................................................31
5.5.1 液压泵的选择................................................................................................31
5.5.2 液压泵所需电机功率的确定........................................................................32
5.5.3 液压阀的选择....................................................................................... .........33
5.5.4 液压辅助元件的选择原则............................................................................33
5.5.5 油箱容量的确定............................................................................................35
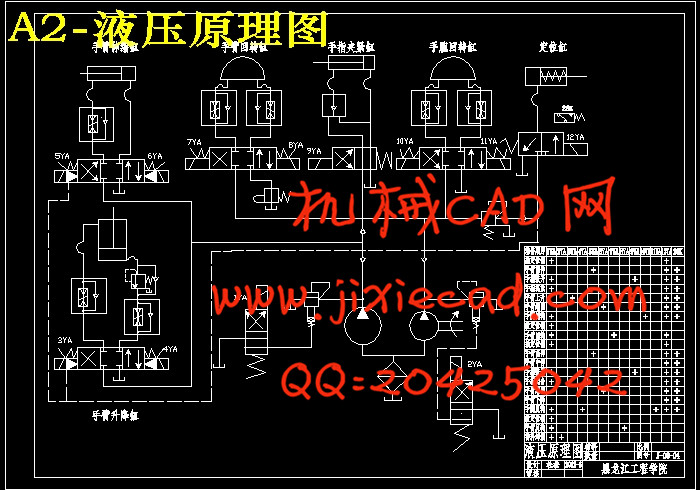
5.5.6 液压原理图....................................................................................................35
5.6 本章小结..................................................................................................................37
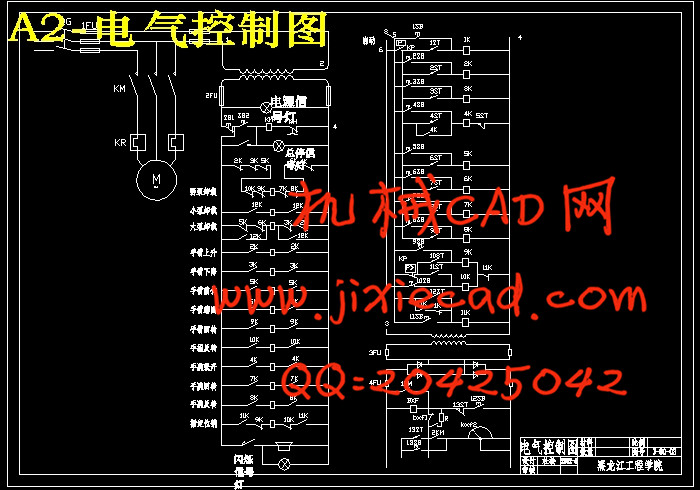
第6章 电气控制系统的设计......................................................................................38
6.1 电气控制的概述......................................................................................................38
6.2 控制电路..................................................................................................................38
6.2.1 控制电路的组成............................................................................................38
6.2.2 继电器的选择................................................................................................38
6.2.3 接触器的选择................................................................................................39
6.2.4 断路器............................................................................................................40
6.3 电气系统设计及原理..............................................................................................40
6.4 电气系统的控制顺序..............................................................................................41
6.5 本章小结..................................................................................................................42
结论.......................................................................................................................................43
参考文献.............................................................................................................................44
致谢.......................................................................................................................................45
附录.......................................................................................................................................46
随着科学技术的发展和自动化生产线在企业产品生产中的广泛应用,机械手作为自动化生产线的重要组成部分也得到了长足的发展和进步。尤其是随着机械结构的优化,气动、液压技术的成熟,控制元件的发展和控制方式的不断改进和创新,机械手的动作精确性、控制灵活性和工作可靠性得到了明显的改善。机械手的出现在减轻工人劳动强度和难度、提高工作效率和质量、降低生产成本上做出了突出贡献,机械手的发展在企业的发展和创收上起到了举足轻重的作用。本课题是一个机、电结合较为紧密的实用性项目,文中对电气的应用、机械结构的设计、控制方法的选择等方面进行了必要的探讨。最后,总结了全文,指出了机械手的改进措施、应用前景和发展方向。
关键字:机械手;液压驱动;电气;自动;控制元件
ABSTRACT
With the development of science and technology,automated production line is widely used in enterprise production, the manipulator as an important part of the automated production line also got considerable development and progress. Especially with the optimization of mechanical structures, pneumatic, hydraulic technology matures, control elements development and control of continuous improvement and innovation, the action of the robot accuracy, control, flexibility and reliability has been a marked improvement .Manipulator made outstanding contributions to reduce labor intensity and difficulty, to improve work efficiency and quality, reduce production costs, Robot development has played a pivotal role in the development of enterprises and income-generating. This issue is a mechanical, electrical, combined with the more closely the usefulness of project, The necessary discussion on the application of electrical, mechanical structure design, choice of control methods etc. Finally, summarizes the full-text, pointed out that the manipulator’s improvement measures, the application prospect and development direction.
Key Words: Manipulator;The hydraulic pressure drive;Electric;Auto;Control components
目 录
摘要……………………………………...........……………………………………………..I
Abstract……………………………………………...……..........……….………….……..II
第1章 绪论.............................................................................................................. ..........1
1.1 工业机器人(机械手)的概述....................................................................................1
1.1.1 工业机器手的发展 ..........................................................................................1
1.1.2 工业机器人的分类..........................................................................................2
1.1.3 工业机械手的应用..........................................................................................2
1.2国内外发展现状.........................................................................................................3
1.3 本课题的预期结果....................................................................................................4
第2章 机械手的总体设计.............................................................................................5
2.1 设计要求....................................................................................................................5
2.2 机械手总体设计方案................................................................................................5
2.2.1 机械手的组成及各部分关系....................................................................................5
2.2.2 总体设计任务 ..................................................................................................5
2.2.3 总体方案拟定..................................................................................................7
2.3 本章小结....................................................................................................................9
第3章机械手结构的设计分析....................................................................................10
3.1 末端操作器的设计分析..........................................................................................10
3.2 末端操作器的概述..................................................................................................10
3.1.1 末端操作器结构的设计分析........................................................................10
3.1.2 末端操作器的设计........................................................................................10
3.3 手腕的设计..............................................................................................................11
3.4 手臂的设计..............................................................................................................12
3.5 机身和机座的设计..................................................................................................13
3.6 本章小结..................................................................................................................................15
第4章 机械手各部件载荷及结构尺寸计算..........................................................17
4.1 设计要求分析..........................................................................................................17
4.2 手指夹紧机构的及尺寸设计..................................................................................17
4.2.1 手指夹紧机构载荷的计算............................................................................17
4.3 手臂伸缩机构的及尺寸的确定..............................................................................22
4.4 手臂俯仰机构结构尺寸的确定..............................................................................24
4.5 手腕摆动机构的确定..............................................................................................24
4.6 机身摆动机构的确定..............................................................................................24
4.7 强度校核..................................................................................................................24
4.8 弯曲稳定性校核......................................................................................................25
4.9 本章小结..................................................................................................................26
第5章 液压系统的设计...............................................................................................27
5.1 液压缸或液压马达所需流量的确定......................................................................27
5.1.1 液压缸工作时所需流量................................................................................27
5.2 液压马达工作时的流量..........................................................................................28
5.3 液压缸或液压马达主要零件的结构材料及技术要求..........................................28
5.3.1 缸体................................................................................................................28
5.3.2 缸盖................................................................................................................29
5.3.3 活塞................................................................................................................29
5.3.4 活塞杆............................................................................................................29
5.3.5 液压缸的缓冲装置........................................................................................29
5.3.6 液压缸的排气装置........................................................................................30
5.4 制定基本方案..........................................................................................................30
5.4.1 基本回路的选择............................................................................................30
5.5 液压元件的选择......................................................................................................31
5.5.1 液压泵的选择................................................................................................31
5.5.2 液压泵所需电机功率的确定........................................................................32
5.5.3 液压阀的选择....................................................................................... .........33
5.5.4 液压辅助元件的选择原则............................................................................33
5.5.5 油箱容量的确定............................................................................................35
5.5.6 液压原理图....................................................................................................35
5.6 本章小结..................................................................................................................37
第6章 电气控制系统的设计......................................................................................38
6.1 电气控制的概述......................................................................................................38
6.2 控制电路..................................................................................................................38
6.2.1 控制电路的组成............................................................................................38
6.2.2 继电器的选择................................................................................................38
6.2.3 接触器的选择................................................................................................39
6.2.4 断路器............................................................................................................40
6.3 电气系统设计及原理..............................................................................................40
6.4 电气系统的控制顺序..............................................................................................41
6.5 本章小结..................................................................................................................42
结论.......................................................................................................................................43
参考文献.............................................................................................................................44
致谢.......................................................................................................................................45
附录.......................................................................................................................................46