设计简介
摘 要
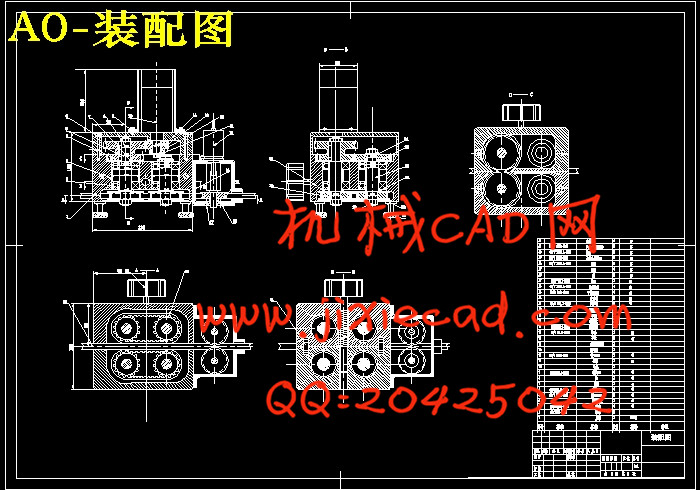
在机器人技术、计算机技术和自动化技术飞速发展的基础上,改造传统内窥镜推进装置或设计新型内窥镜推进装置是医学中的热点问题,国内外研究机构在智能化内窥镜技术方面的研究,主要集中在内窥镜介入机构学方面的探索等。基于单点光纤光栅传感头的内窥镜形状感知系统是利用单点传感头沿着内窥镜工作钳道前进时在内窥镜上等距离的一系列点处采集波长来进行形状感知的。这就要求设计一种介入传感器的机械装置。传感器介入到内窥镜内的方式有两种:主动引导和外力介入。由于内窥镜的钳道直径大小不超过3毫米,长度大约为1000毫米,所以光纤光栅传感头的介入方式不宜用主动引导方式。本文通过对柔性杆的研究,以及如何对柔性杆改进推进装置进行了研究,利用摩擦轮作为传动部件来推进细径线状传感器的自动推进系统, 传感器被夹持在两摩擦轮凹槽之间,依靠摩擦轮和传感器表面之间的摩擦力,利用摩擦和挤压的方式介入光纤光栅传感器。通过手柄上的弹簧调整两摩擦轮之间的间隙,还可以灵活改变介入力大小。
关键词:柔性杆,推进装置,摩擦轮,挤压Abstract
In robotics, computer technology and automation technology rapid development on the basis of the transformation of traditional endoscope propelling device, or design new endoscope propelling device is in the medicine hot issues, domestic and foreign research institutions in the intelligent endoscope technology research, mainly concentrated in the endoscope intervention mechanism of exploration. Based on the single point optical fiber grating sensing head of the endoscope shape sensing system is the use of a single point sensing head along the endoscope working channel in the endoscope forceps forward on a series of points equidistant from the collection wavelength to shape perception. This requires the design of a sensor in mechanical device. The sensor into the endoscope in two ways: active guidance and intervention of foreign powers. As the endoscope forceps channel diameter less than 3mm, length of about 1000 mm, so the optical fiber grating sensing head intervention should not use active guide way.
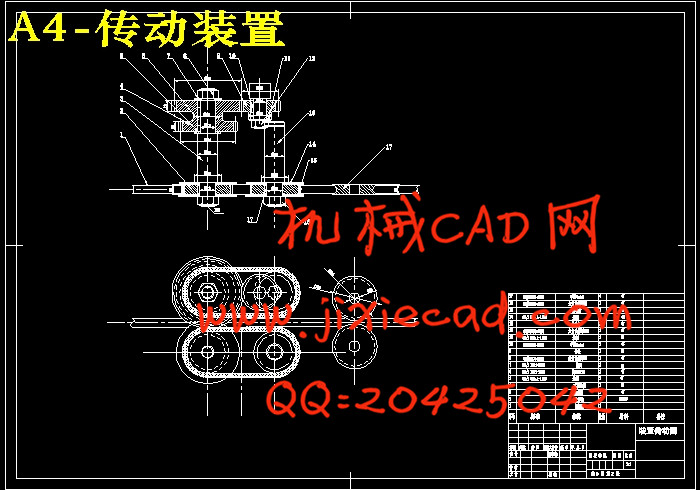
Based on the study of flexible rod, as well as how to improve the flexible rod propulsion device was studied, using the friction wheel as a driving component to promote small diameter linear sensor automatic propulsion system, sensor is clamped between the two friction wheels between the recesses, rely on friction wheel and a sensor surface friction, friction and extrusion of intervention fiber Bragg grating sensor. Through the handle on the spring to adjust the gap between the two friction wheels, also can change intervention force.
Key Words: Flexible rod, a propulsion device, a friction wheel, extrusion目 录
摘 要 IBased on the study of flexible rod, as well as how to improve the flexible rod propulsion device was studied, using the friction wheel as a driving component to promote small diameter linear sensor automatic propulsion system, sensor is clamped between the two friction wheels between the recesses, rely on friction wheel and a sensor surface friction, friction and extrusion of intervention fiber Bragg grating sensor. Through the handle on the spring to adjust the gap between the two friction wheels, also can change intervention force.
Key Words: Flexible rod, a propulsion device, a friction wheel, extrusion目 录
Abstract II
目 录 III
第1章 绪论 1
第2章 设计方案的选择与分析 3
2.1 利用摩擦轮连续介入机构及工作原理 3
2.1.1 连续介入结构工作原理 3
2.1.2 推进装置设计 4
2.2 间歇送进机构及其工作原理 5
2.2.1 机构原理 5
2.3 方案的选择 6
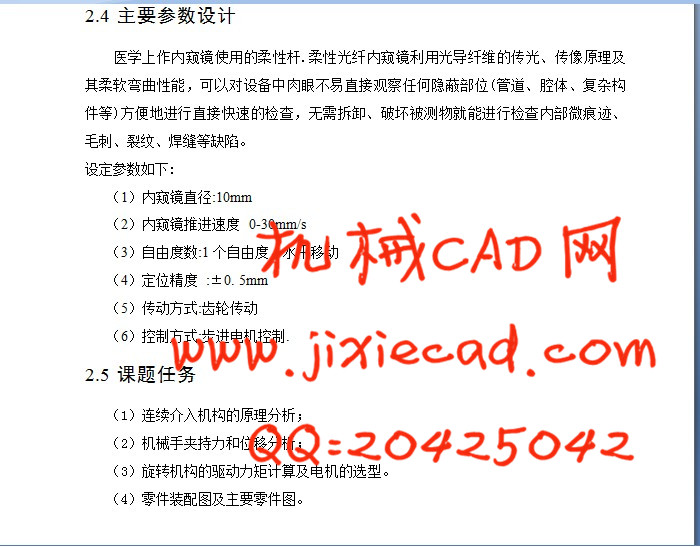
2.4 主要参数设计 6
2.5 课题任务 6
第3章 系统设计 7
3.1 连续介入机构的原理分析 7
3.1.1 推进装置的设计 7
3.2 机械手夹持力和位移分析 8
3.2.1 机械手夹持力分析 8
3.2.2 位移分析 8
3.3旋转机构的驱动力矩计算及电机的选型 9
第4章 装置零件设计及校核 11
4.1 轴的结构设计 11
4.1.1 轴的设计 11
4.1.2 轴的结构设计 12
4.1.3 轴的校核 12
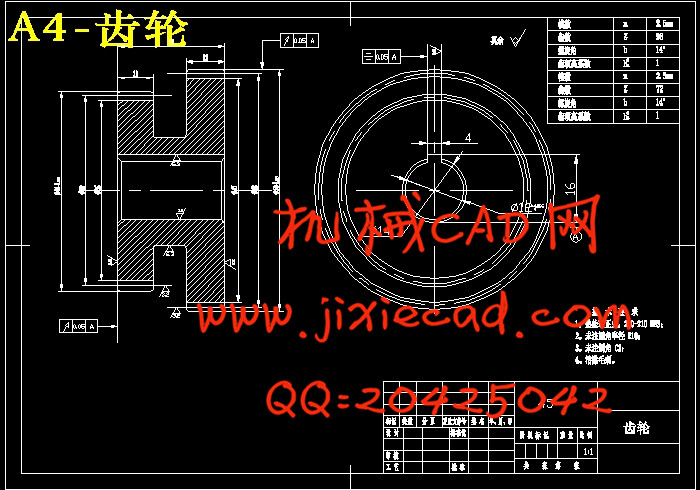
4.2 齿轮设计 16
4.3 轴承的选择以及计算 18
4.4 键连接的选择以及校核计算 20
总结与展望 21
参考文献 23
致 谢 24
附录:零件图与装配图 25
1. 齿轮轴零件图1 25
2. 齿轮轴零件图2 25
3 齿轮轴零件图3 25
4 传动图 25
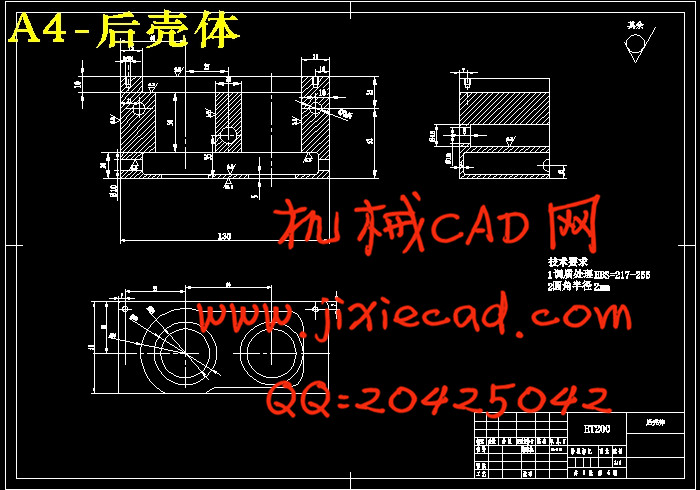
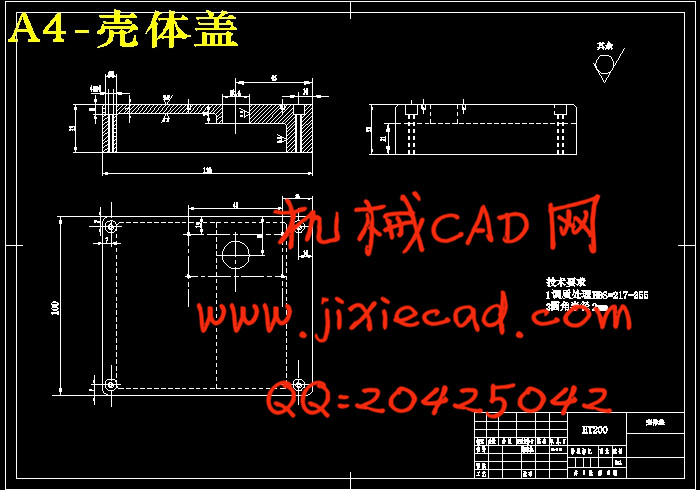
5 壳体1 25
6 壳体2 25
7 壳体3 25
8 装配图 25