设计简介
摘 要
柔性制造系统(FMS)是集成了自动控制技术、人工智能、计算机语言编程组态监控等现代化技术的生产设备。目前实践教学作为教学过程中的一个环节,是工科院校培养跨世纪创造性人才必不可少的。为配合卓越工程师试点工作中的课程改革,结合教学研究任务,本设计针对学校实验室的柔性制造系统中的立体仓库环节进行实验前期准备工作。
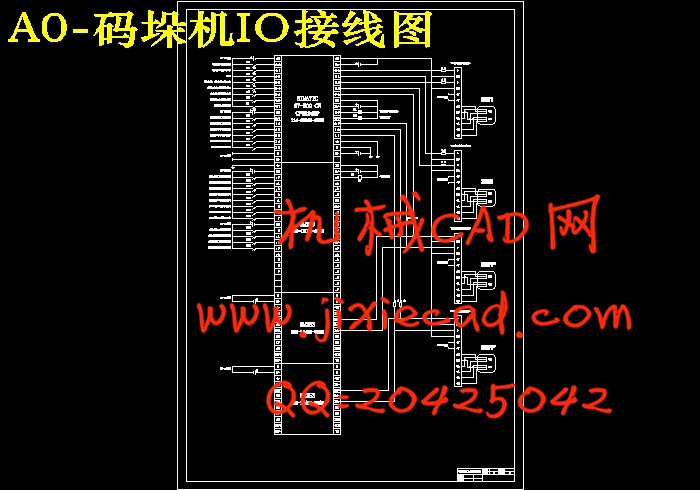
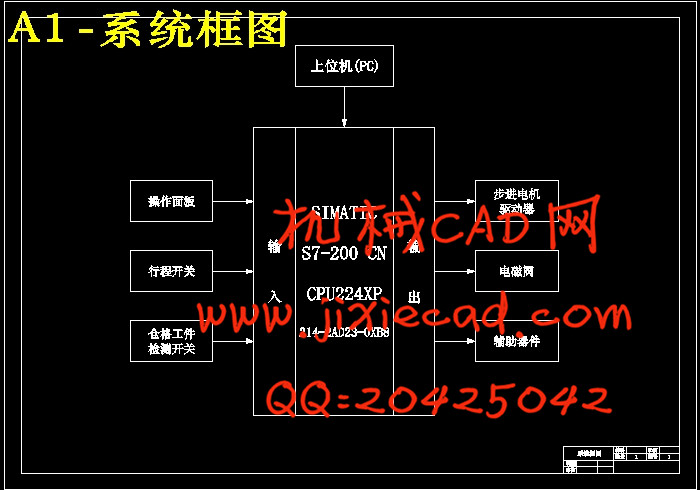
本设计主要由三层12仓位的立体仓库和四自由度码垛机械手两部分组成。其中码垛机械手由机械传动部分和电气控制两部分组成,电气控制是由西门子S7-200 CPU224XP型可编程控制器(PLC)、步进电机驱动器、开关电源、位置传感器等器件组成。
在设计过程中,不断参阅相关电气设计规范的资料,参照现有的码垛机的工作模式及控制方法,最终完成PLC为控制核心的码垛单元的PLC控制系统设计,并应用组态软件制作监控仿真界面。
关键词:柔性制造系统;码垛机;立体仓库;PLC;组态
ABSTRACT
A Flexible manufacturing systems (FMS) is the production equipment, which integrates the automatic control technology, artificial intelligence, computer programming language configuration and monitoring modern technology.The current practice of teaching as teaching process of a part is the training of cross century creative talents in Colleges of engineering is essential. As with outstanding engineer pilot work in the curriculum reform, combined with teaching and research tasks, the design for the school laboratory in the flexible manufacturing system of stereoscopic warehouse links in experimental preparations.
This system is mainly composed of three layers of 12 positions of the warehouse and four degrees of freedom palletizing manipulator. The palletizing manipulator is composed of a mechanical drive and an electric control. The electrical control is formed by Siemens S7-200 CPU224XP programmable logic controller (PLC), stepper motor drive power modules, switching power supply, sensors and other devices.
During the design process, the author refers a lot of the materials concerning the electrical design specification, refer to the existing palletizer work mode and control method, finally completed the PLC as control core Palletizing unit PLC control system design, and the application of configuration software production control simulation interface.
Key words: Flexible manufacturing systems; Palletizer; Stereoscopic warehouse; PLC; Configuration
摘要 I
Abstract II
第1章 绪论 1
1.1 课题背景 1
1.2 码垛机的概述 1
1.2.1 码垛机在国外的研究现状 1
1.2.2 码垛机在国内的研究现状 2
1.2.3 码垛机的发展趋势 3
1.3 课题的主要研究内容 3
第2章 码垛机的总体方案设计 4
2.1 码垛机的总体框图 4
2.2 码垛机的结构组成 5
2.3 码垛机的控制方案 6
2.3.1 码垛机的控制功能要求 6
2.3.2 码垛机的控制方案确定 6
2.3.3 码垛机的定位方案确定 7
2.4 本章小结 9
第3章 码垛机的硬件设计选型及介绍 10
3.1 电动机的计算选取 10
3.1.1 码垛机的已知参数 10
3.1.2 根据已知参数对电动机的选型计算 10
3.2 步进电机驱动器的介绍 11
3.3 可编程控制器的选型及I/O分配 13
3.3.1 可编程控制器的选型 13
3.3.2 可编程控制器的I/O分配 13
3.4 导轨的形式介绍 14
3.5 滚珠丝杠的介绍 15
3.6 本章小结 15
第4章 码垛机的软件设计 16
4.1 编程软件介绍及使用 16
4.2 码垛机的PLC程序设计 18
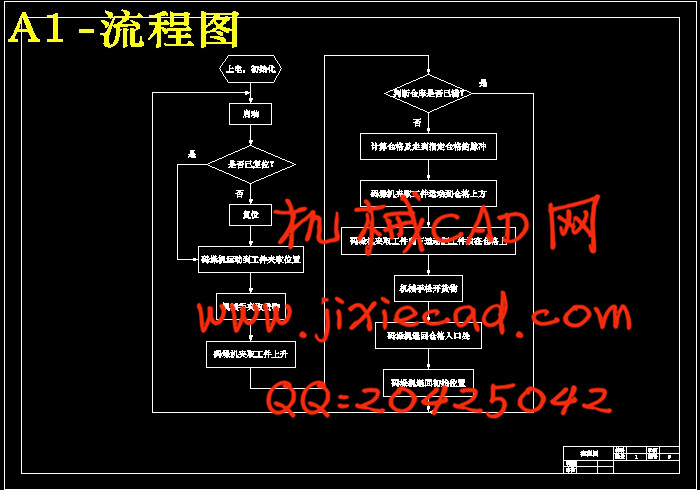
4.2.1 码垛机的工作流程 18
4.2.2 码垛机的软件设计 20
4.3 本章小结 37
第5章 组态王仿真画面的设计 38
5.1 组态王监控软件介绍 38
5.2 组态王监控软件仿真设计 38
5.2.1 建立组态软件与PLC之间的通讯连接 39
5.2.2 组态画面及监控元素的设计 40
5.3 本章小结 45
结论 46
参考文献 47
致谢 49