设计简介
摘要
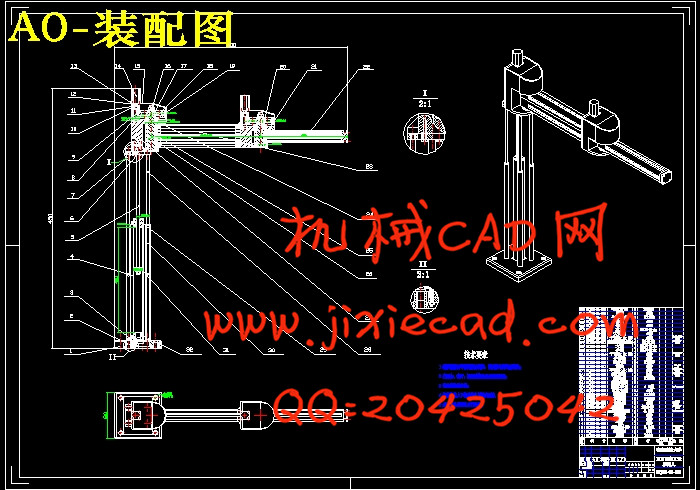
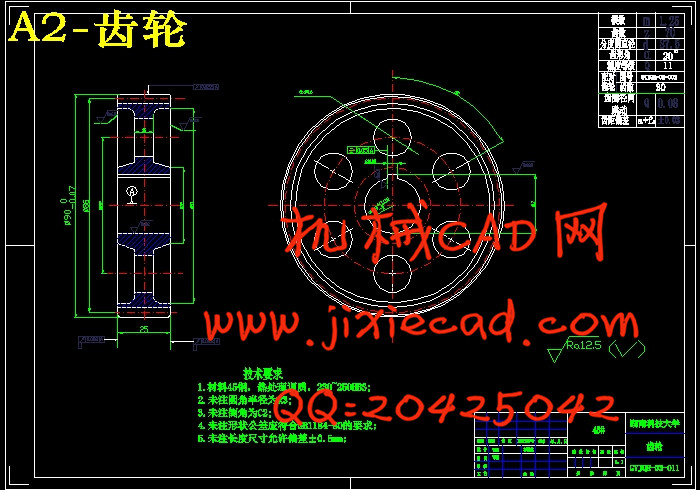
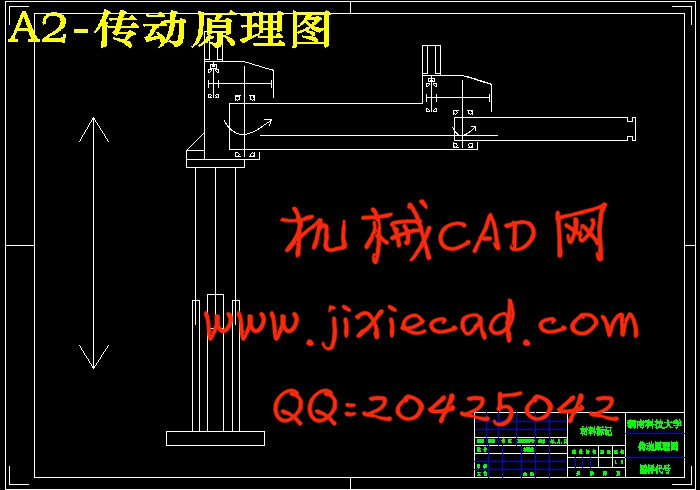
本文简单介绍了本课题的来源、意义和内容,回顾了国内外机械手的发展概况,介绍了目前机器人的几种分类形式,列出了在生产、生活上和高科技领域中几种常见的机器人。本机械手的主要工作是在控制器的作用下将工件从一条流水线搬运到另一条流水线这一简单的动作,通过综合考虑选择了三自由度平面关节型机械手,采用两个回转关节和一个移动关节,两个回转关节控制前后左右运动,而移动关节则实现上下运动,结构简单,成本低,而且针对不同类型的零件可配置不同的末端执行器,减少了闲置率,提高了工作效率。本文对机械手的机械传动部分进行了设计,对驱动、传动系统进行了方案设计并进行了气压缸,步进电机等主要部件的选取和校核。最后用AutoCAD、SolidWorks等绘制相关工程图。
关键词: 三自由度;机械手;搬运;步进电机
Abstract
The article introduces the resource, content and practical application value of the thesis, and reviews the development of robots inside and abroad, and introduces the sort ofrobots, and enumerates several hackneyed robots in manufacture, life and high-tech. The main work of the manipulator is that put the work-piece from a line to another line the simple action under the function of the controller. Through the comprehensive consider choose three degrees of freedom Selective Compliance Assembly Robot Arm, Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down ,simple structure, low cost and according to different types of part add a end effector, reducing the unemployment, improving the working efficiency. The article main design the mechanical transmission parts of the manipulator, the writer designs the project of driving system and transmission system, selects and checks air cylinder magnetic,stepping motor, and so on.The last draw the relevant drawings in AutoCAD, SolidWorks, etc.
Key words: Three degrees of freedom;Manipulator;handling;magnetic stepping motor
目 录
第一章 绪论……………………………………………………………………………… 1
1.1 工业机器人运用情况 …………………………………………………………… 1
1.2 国内外工业机器人的发展现状 ………………………………………………… 1
1.3 工业机器人的发展趋势 ………………………………………………………… 3
第二章 工业机器人的总体设计…………………………………………………………… 6
2.1 设计要求 ………………………………………………………………………… 6
2.2 总体方案设计 …………………………………………………………………… 6
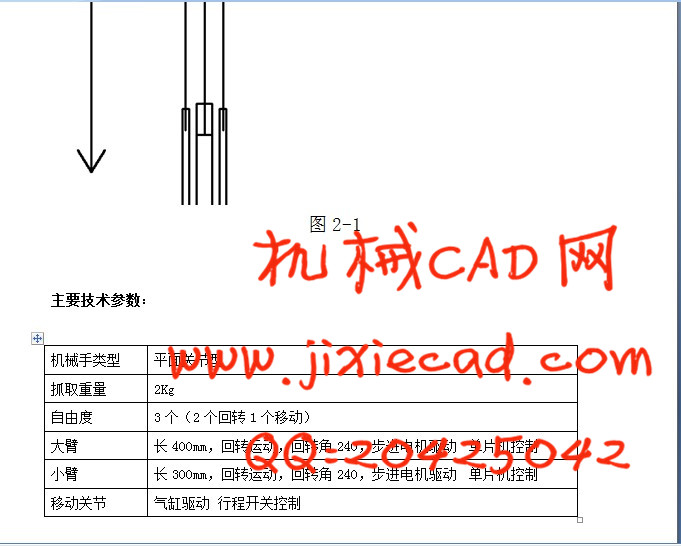
2.3 运动原理简图及主要技术参数 ………………………………………………… 7
第三章 工业机器人的结构设计…………………………………………………………… 9
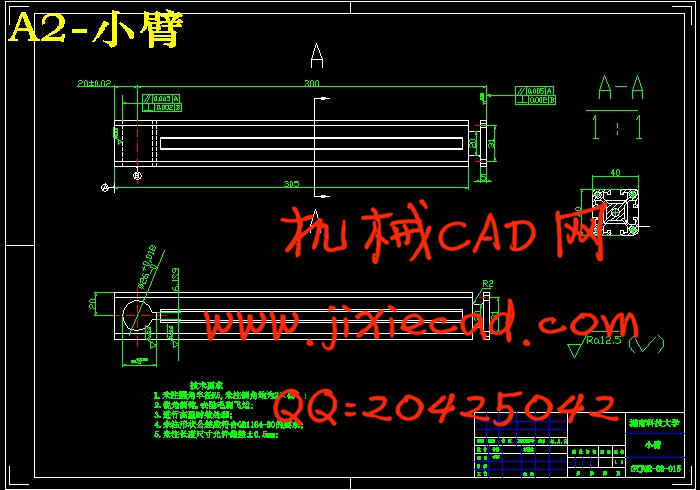
3.1 小臂的机构设计及计算 ………………………………………………………… 9
3.1.1 驱动方式及计算 …………………………………………………………10
3.1.2 小臂的结构设计及计算 …………………………………………………13
3.1.3 轴和轴承的选择和校核 …………………………………………………15
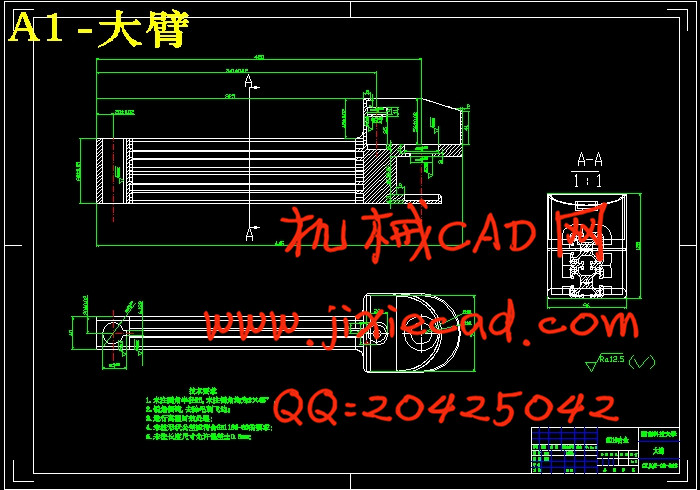
3.2 大臂的机构设计及计算 …………………………………………………………22
3.2.1 驱动方式及计算 …………………………………………………………22
3.2.2 大臂的结构设计及计算 …………………………………………………25
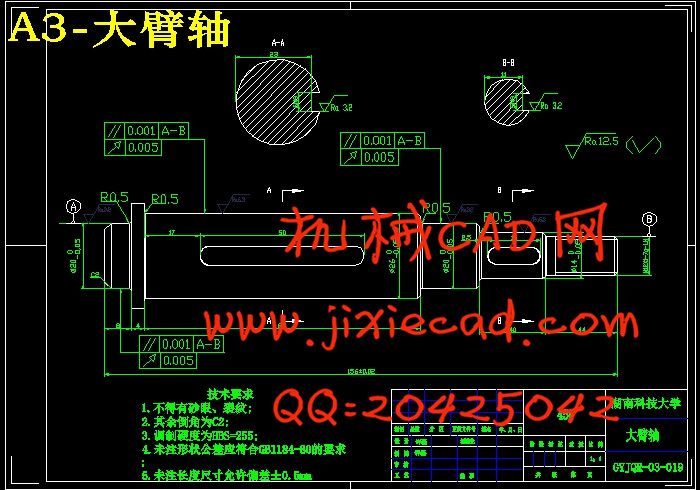
3.2.3 轴和轴承的选择和校核 …………………………………………………27
3.3 立柱的机构设计及计算 …………………………………………………………34
3.3.1 驱动方式的比较和选择 …………………………………………………34
3.3.2 气压系统的设计和计算 …………………………………………………35
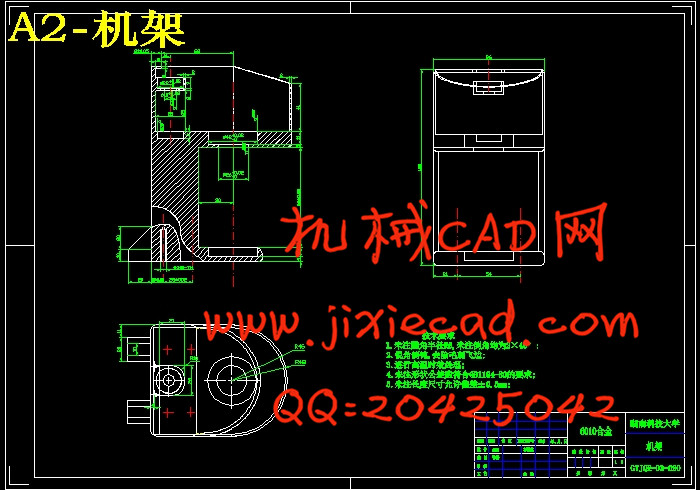
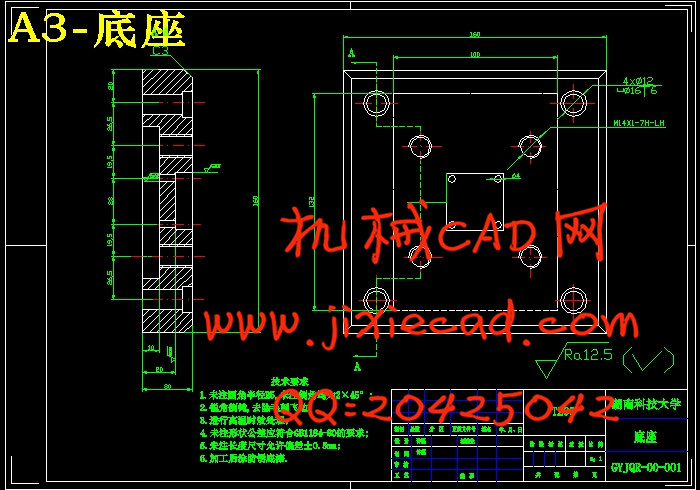
3.4 机座的机构设计和计算 …………………………………………………………36
第四章 结论………………………………………………………………………………38
参 考 文 献………………………………………………………………………………39
致 谢 ………………………………………………………………………………………40
本文简单介绍了本课题的来源、意义和内容,回顾了国内外机械手的发展概况,介绍了目前机器人的几种分类形式,列出了在生产、生活上和高科技领域中几种常见的机器人。本机械手的主要工作是在控制器的作用下将工件从一条流水线搬运到另一条流水线这一简单的动作,通过综合考虑选择了三自由度平面关节型机械手,采用两个回转关节和一个移动关节,两个回转关节控制前后左右运动,而移动关节则实现上下运动,结构简单,成本低,而且针对不同类型的零件可配置不同的末端执行器,减少了闲置率,提高了工作效率。本文对机械手的机械传动部分进行了设计,对驱动、传动系统进行了方案设计并进行了气压缸,步进电机等主要部件的选取和校核。最后用AutoCAD、SolidWorks等绘制相关工程图。
关键词: 三自由度;机械手;搬运;步进电机
Abstract
The article introduces the resource, content and practical application value of the thesis, and reviews the development of robots inside and abroad, and introduces the sort ofrobots, and enumerates several hackneyed robots in manufacture, life and high-tech. The main work of the manipulator is that put the work-piece from a line to another line the simple action under the function of the controller. Through the comprehensive consider choose three degrees of freedom Selective Compliance Assembly Robot Arm, Selective Compliance Assembly Robot Arm have two slew joints and one move joints , two slew joints control the moving of the front and back left and right . the move joints control the moving of up and down ,simple structure, low cost and according to different types of part add a end effector, reducing the unemployment, improving the working efficiency. The article main design the mechanical transmission parts of the manipulator, the writer designs the project of driving system and transmission system, selects and checks air cylinder magnetic,stepping motor, and so on.The last draw the relevant drawings in AutoCAD, SolidWorks, etc.
Key words: Three degrees of freedom;Manipulator;handling;magnetic stepping motor
目 录
第一章 绪论……………………………………………………………………………… 1
1.1 工业机器人运用情况 …………………………………………………………… 1
1.2 国内外工业机器人的发展现状 ………………………………………………… 1
1.3 工业机器人的发展趋势 ………………………………………………………… 3
第二章 工业机器人的总体设计…………………………………………………………… 6
2.1 设计要求 ………………………………………………………………………… 6
2.2 总体方案设计 …………………………………………………………………… 6
2.3 运动原理简图及主要技术参数 ………………………………………………… 7
第三章 工业机器人的结构设计…………………………………………………………… 9
3.1 小臂的机构设计及计算 ………………………………………………………… 9
3.1.1 驱动方式及计算 …………………………………………………………10
3.1.2 小臂的结构设计及计算 …………………………………………………13
3.1.3 轴和轴承的选择和校核 …………………………………………………15
3.2 大臂的机构设计及计算 …………………………………………………………22
3.2.1 驱动方式及计算 …………………………………………………………22
3.2.2 大臂的结构设计及计算 …………………………………………………25
3.2.3 轴和轴承的选择和校核 …………………………………………………27
3.3 立柱的机构设计及计算 …………………………………………………………34
3.3.1 驱动方式的比较和选择 …………………………………………………34
3.3.2 气压系统的设计和计算 …………………………………………………35
3.4 机座的机构设计和计算 …………………………………………………………36
第四章 结论………………………………………………………………………………38
参 考 文 献………………………………………………………………………………39
致 谢 ………………………………………………………………………………………40