设计简介
内容摘要:
本文简要介绍了工业机器人的概念,机械手的组成和分类。本文对机械手进行总体方案设计,确定了机械手的转动方案,确定了机械手的技术参数。同时,计算出了回转油缸的驱动力矩,设计了机械手的手臂结构。详细计算出机械手液压驱动系统的各个技术参数,利用可编程序控制器对机械手进行控制,根据机械手的工作流程制定了可编程序控制器的控制方案,并绘制了可编程序控制器的控制程序。
关键词 机械手,液压,可编程序控制器(PLC)

Abstract This paper briefly introduced the concept of indu-
strial robot, and their composition and classification.In this paper, the mechanical design of the overall plan in order to determine the manipulator rotation programme and determine the technical parameters of the manipulator. At the same time, calculated the driven torque of the rotary fuel tank torque. Designed arm structure of a manipulator. The detailed cal-
culations to manipulator hydraulic drive system for various technicalparameters, using programmable logic controller to control the mechanical hand, according to the workflow mani-
pulator developed a PLC control programme, and the mapping of the PLC Control procedures.
Keywords manipulator, hydraulic, programmable logic
controller (PLC)
目 录
前言………………………………………………………………………… 1
第一章 绪论…………………………………………………………………3
1.1 工业机械人概述……………………………………………………3
1.2 上下料机械手的组成和分类………………………………………4
1.2.1机械手的组成 ………………………………………………4
1.2.2机械手的分类 ………………………………………………5
第二章 总体方案的设计……………………………………………………7
2.1 工业机械手的传动方案设计………………………………………7
2.2 主要技术指标的确定………………………………………………7
2.3 上下料机械手的动作顺序及其控制要求…………………………8
第三章 机械手的机械结构设计………………………………………… 10
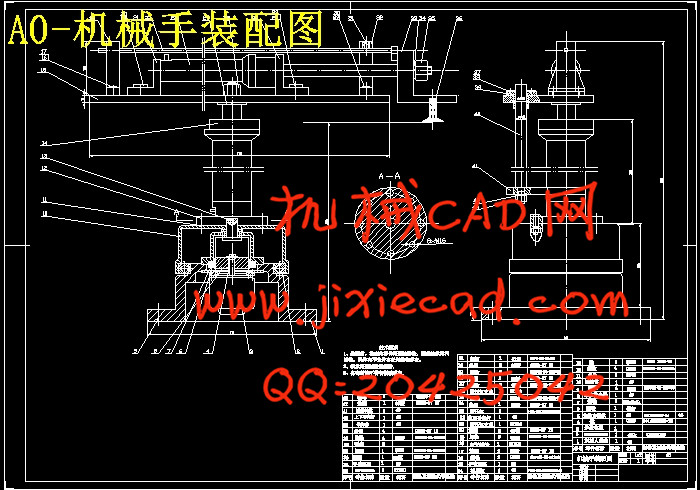
3.1上下料机械手的机械结构组成……………………………………10
3.2机械手的手臂设计…………………………………………………10
3.2.1 手臂的作用和组成 ……………………………………… 10
3.2.2 对设计手臂的要求…………………………………………10
3.2.3 手臂驱动力的计算…………………………………………11
3.2.4 臂部直升降运动驱动力的计算……………………………12
3.2.5 臂部回转运动的计算………………………………………12
3.2.6 升降柱不自锁的条件………………………………………13
3.3机械手的机身设计…………………………………………………14
3.3.1 机身的作用…………………………………………………14
3.3.2 机身设计时应注意的事项…………………………………14
第四章 机械手液压驱动系统的选择与计算…………………………… 15
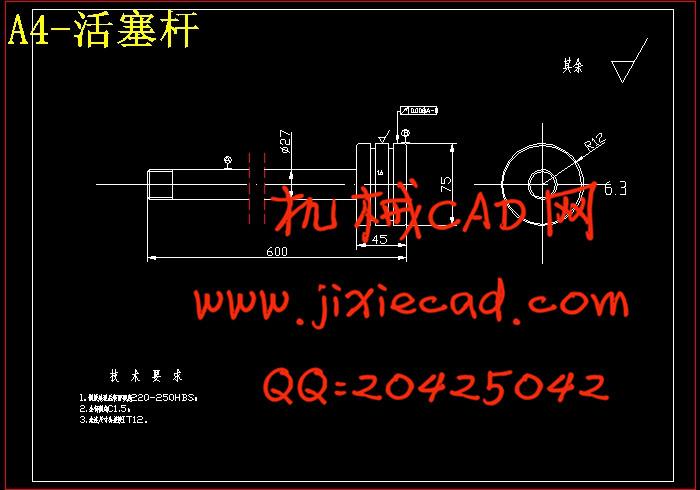
4.1手臂伸缩油缸的选择及计算………………………………………15
4.1.1 手臂伸缩油缸的及计算……………………………………15
4.1.2 手臂伸缩油缸的选择及计算………………………………16
第五章 自动上料机械手液压系统各项工作原理……………………… 18
5.1 液压系统的组成………………………………………………… 18
5.2 液压传动系统机械手的特点………………………………………18
5.3 自动上料机械手的缓冲和定位……………………………………19
5.4 油缸泄露问题与密封装置…………………………………………19
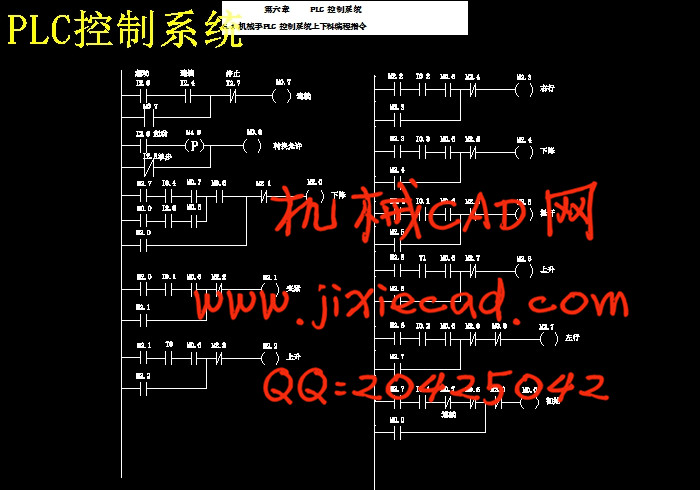
第六章 PLC 控制系统……………………………………………………21
6.1机械手PLC 控制系统上下料编程指令……………………………21
致 谢 ………………………………………………………………………22
参考文献……………………………………………………………………22
本文简要介绍了工业机器人的概念,机械手的组成和分类。本文对机械手进行总体方案设计,确定了机械手的转动方案,确定了机械手的技术参数。同时,计算出了回转油缸的驱动力矩,设计了机械手的手臂结构。详细计算出机械手液压驱动系统的各个技术参数,利用可编程序控制器对机械手进行控制,根据机械手的工作流程制定了可编程序控制器的控制方案,并绘制了可编程序控制器的控制程序。
关键词 机械手,液压,可编程序控制器(PLC)
Abstract This paper briefly introduced the concept of indu-
strial robot, and their composition and classification.In this paper, the mechanical design of the overall plan in order to determine the manipulator rotation programme and determine the technical parameters of the manipulator. At the same time, calculated the driven torque of the rotary fuel tank torque. Designed arm structure of a manipulator. The detailed cal-
culations to manipulator hydraulic drive system for various technicalparameters, using programmable logic controller to control the mechanical hand, according to the workflow mani-
pulator developed a PLC control programme, and the mapping of the PLC Control procedures.
Keywords manipulator, hydraulic, programmable logic
controller (PLC)
目 录
前言………………………………………………………………………… 1
第一章 绪论…………………………………………………………………3
1.1 工业机械人概述……………………………………………………3
1.2 上下料机械手的组成和分类………………………………………4
1.2.1机械手的组成 ………………………………………………4
1.2.2机械手的分类 ………………………………………………5
第二章 总体方案的设计……………………………………………………7
2.1 工业机械手的传动方案设计………………………………………7
2.2 主要技术指标的确定………………………………………………7
2.3 上下料机械手的动作顺序及其控制要求…………………………8
第三章 机械手的机械结构设计………………………………………… 10
3.1上下料机械手的机械结构组成……………………………………10
3.2机械手的手臂设计…………………………………………………10
3.2.1 手臂的作用和组成 ……………………………………… 10
3.2.2 对设计手臂的要求…………………………………………10
3.2.3 手臂驱动力的计算…………………………………………11
3.2.4 臂部直升降运动驱动力的计算……………………………12
3.2.5 臂部回转运动的计算………………………………………12
3.2.6 升降柱不自锁的条件………………………………………13
3.3机械手的机身设计…………………………………………………14
3.3.1 机身的作用…………………………………………………14
3.3.2 机身设计时应注意的事项…………………………………14
第四章 机械手液压驱动系统的选择与计算…………………………… 15
4.1手臂伸缩油缸的选择及计算………………………………………15
4.1.1 手臂伸缩油缸的及计算……………………………………15
4.1.2 手臂伸缩油缸的选择及计算………………………………16
第五章 自动上料机械手液压系统各项工作原理……………………… 18
5.1 液压系统的组成………………………………………………… 18
5.2 液压传动系统机械手的特点………………………………………18
5.3 自动上料机械手的缓冲和定位……………………………………19
5.4 油缸泄露问题与密封装置…………………………………………19
第六章 PLC 控制系统……………………………………………………21
6.1机械手PLC 控制系统上下料编程指令……………………………21
致 谢 ………………………………………………………………………22
参考文献……………………………………………………………………22