设计简介
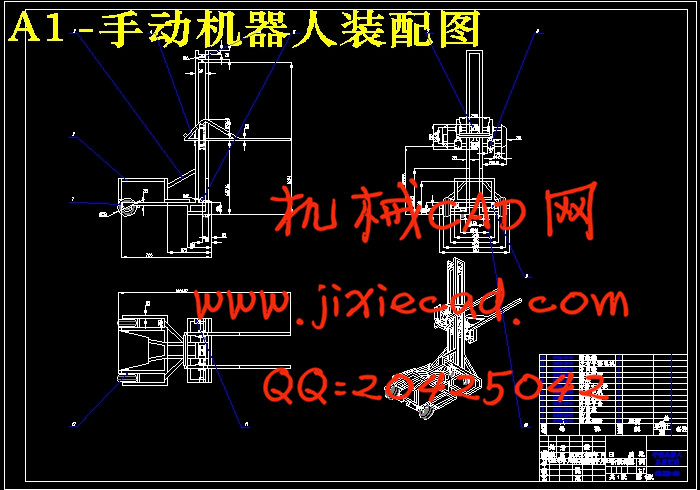
摘 要:在国内外机器人竞赛热潮的背景下,作为人才新生主力军的大学生,自制机器人参加各种比赛已经成为了大学校园里一道亮丽的风景线。作为湖南农业大学参赛代表之一,我参加了2012年亚太大学生机器人大赛的各项活动,参与了机器人的设计和制作整个过程,在创新设计能力、动手能力和培养团队合作精神等方面都得到了很大提高。而本次设计的手动机器人是一台自动化程度较高、控制精确灵活的机器人,这台手动机器人由行走模块、主控模块和机械手臂等组成。需要完成一定难度的硬币精确抓放,搬运收集机器人并精确放置等工作(题目源于2012年亚太大学生机器人大赛)。这对机器人的竞争力、灵活性、准确性有较高要求。手动机器人的控制系统采用基于STM32的CorTex -M3内核的开发板作为底层控制模块,充分利用该款单片机高速处理能力与可靠性高的优势。
关键词:机器人;驱动;通信;PID算法 ;PWM调速;
Abstract:In the situation of the booming robotics competition at home and abroad, as the main force of college students of the talent newborn ,the phenomenon of sending homemade robots to various competitions has become a beautiful landscape in the university. As one of the contestant of Hunan Agricultural University, I have participated the Robert competition which was hold in the Universiade in 2012.The activities of Asia-Pacific Robot Contest include robot design and production of the entire process. It has been greatly improved in terms of innovative design capability, ability of practicing and cultivating teamwork spirit. This design is a high degree of automation, accurately and flexibly controlled manual robot, which consists of the walking module, the main control module and the mechanical arms. The main purpose is to complete an accurately action of picking coins , moving and collecting robots and replacing. (the title comes from the Asia-Pacific Robot Contest of College Students in 2012).It has a high requirement of robot in terms of competitiveness, flexibility, accuracy. The control system of the manual robot uses development board which is based on the STM32 Cortex-M3 core, as the underlying control module. It has taken full advantage of high-speed processing capability and high reliability of that subsection micro-controller.
Key words: Robot; drive; communication; PID algorithm; PWM speed control;
目 录
摘 要 1
关键词 1
1 前言 2
1.1 2012Robocon赛制简介 2
1.1.1 比赛主题 2
1.1.2 比赛规则 2
1.2 手动机器人任务简述 3
1.3 本次机器人设计原则 4
1.4 策略概要 4
2 手动机器人的总体设计 5
2.1 机械结构设计 5
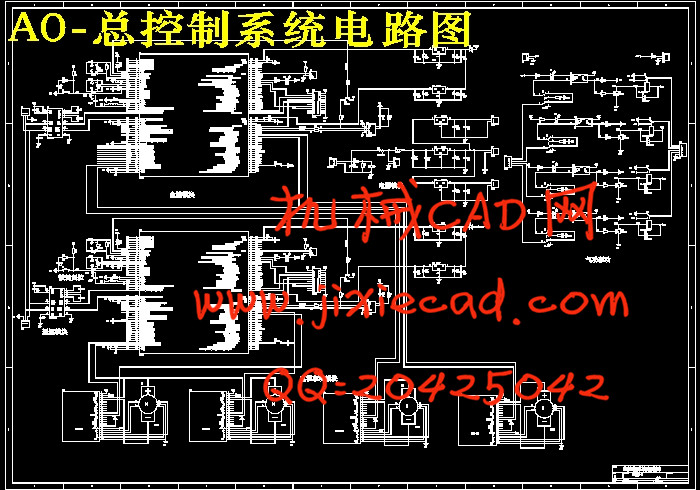
2.2 控制系统设计 6
3. 手动机器人硬件电路设计 7
3.1 CPU选择 7
3.1.1 最小系统原理图 10
3.2 电机选型 11
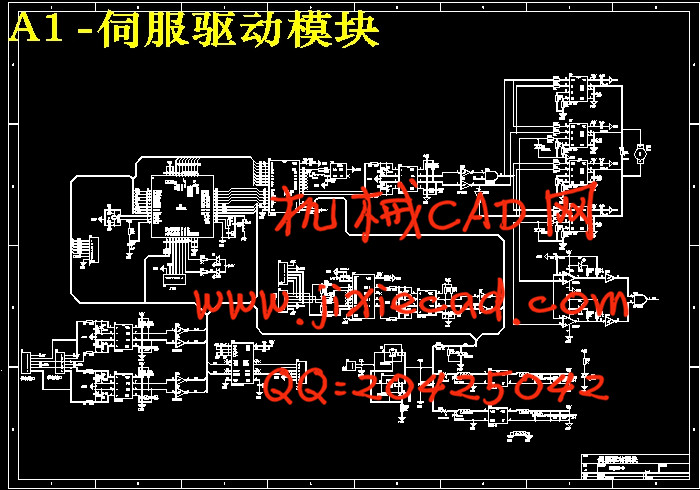
3.3 直流伺服电机驱动模块设计 12
3.3.1 LM629驱动模块 13
3.3.2 单片机模块 19
3.3.3 18200工作原理 20
3.4 电源模块 23
3.4.1 系统电源设计 23
3.4.2 STM32控制板电源设计 23
3.4.3 过流保护与欠压保护电路设计 24
3.5 通信模块 25
3.6 人机交互模块 26
3.7 信号隔离电路设计 28
3.8 编码盘采样模块电路设计 28
3.9 复位电路设计 29
3.10 硬件抗干扰及可靠性保证 29
4 手动机器人软件及算法论证 30
4.1 主控板程序流程图 30
4.2 Atmega32L程序流程图 31
4.3 PWM的产生 31
4.3.1 软件生成PWM 31
4.3.2 硬件生成PWM 32
5 调试工具和方法介绍 35
5.1 应用Protues进行调试与仿真 35
5.2 应用IAR Embedded Workbench for ARM进行编程调试 36
6 结论 36
参考文献 37
致谢 37
附录 38
关键词:机器人;驱动;通信;PID算法 ;PWM调速;
Abstract:In the situation of the booming robotics competition at home and abroad, as the main force of college students of the talent newborn ,the phenomenon of sending homemade robots to various competitions has become a beautiful landscape in the university. As one of the contestant of Hunan Agricultural University, I have participated the Robert competition which was hold in the Universiade in 2012.The activities of Asia-Pacific Robot Contest include robot design and production of the entire process. It has been greatly improved in terms of innovative design capability, ability of practicing and cultivating teamwork spirit. This design is a high degree of automation, accurately and flexibly controlled manual robot, which consists of the walking module, the main control module and the mechanical arms. The main purpose is to complete an accurately action of picking coins , moving and collecting robots and replacing. (the title comes from the Asia-Pacific Robot Contest of College Students in 2012).It has a high requirement of robot in terms of competitiveness, flexibility, accuracy. The control system of the manual robot uses development board which is based on the STM32 Cortex-M3 core, as the underlying control module. It has taken full advantage of high-speed processing capability and high reliability of that subsection micro-controller.
Key words: Robot; drive; communication; PID algorithm; PWM speed control;
目 录
摘 要 1
关键词 1
1 前言 2
1.1 2012Robocon赛制简介 2
1.1.1 比赛主题 2
1.1.2 比赛规则 2
1.2 手动机器人任务简述 3
1.3 本次机器人设计原则 4
1.4 策略概要 4
2 手动机器人的总体设计 5
2.1 机械结构设计 5
2.2 控制系统设计 6
3. 手动机器人硬件电路设计 7
3.1 CPU选择 7
3.1.1 最小系统原理图 10
3.2 电机选型 11
3.3 直流伺服电机驱动模块设计 12
3.3.1 LM629驱动模块 13
3.3.2 单片机模块 19
3.3.3 18200工作原理 20
3.4 电源模块 23
3.4.1 系统电源设计 23
3.4.2 STM32控制板电源设计 23
3.4.3 过流保护与欠压保护电路设计 24
3.5 通信模块 25
3.6 人机交互模块 26
3.7 信号隔离电路设计 28
3.8 编码盘采样模块电路设计 28
3.9 复位电路设计 29
3.10 硬件抗干扰及可靠性保证 29
4 手动机器人软件及算法论证 30
4.1 主控板程序流程图 30
4.2 Atmega32L程序流程图 31
4.3 PWM的产生 31
4.3.1 软件生成PWM 31
4.3.2 硬件生成PWM 32
5 调试工具和方法介绍 35
5.1 应用Protues进行调试与仿真 35
5.2 应用IAR Embedded Workbench for ARM进行编程调试 36
6 结论 36
参考文献 37
致谢 37
附录 38