设计简介
为了增强虚拟手交互的真实性和沉浸感,提出了一种考虑人手指力学特性的虚拟手接触力测量方法。随着虚拟现实技术的发展只依靠视觉和听觉已不能满足人机交互系统的要求,对力觉和触觉的模拟和再现显得愈发重要和迫切。
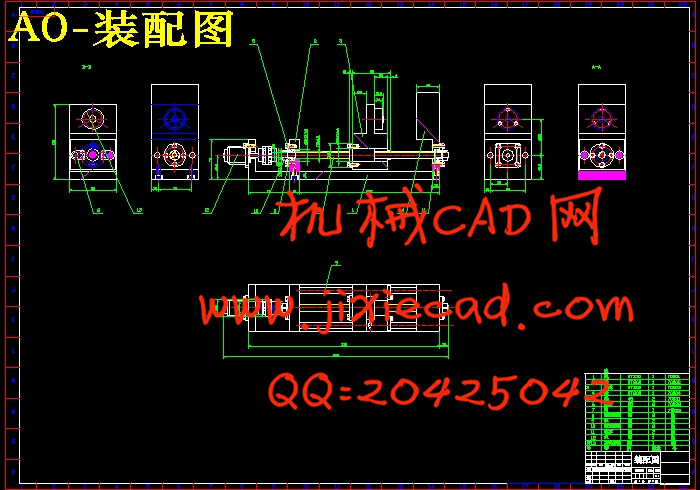
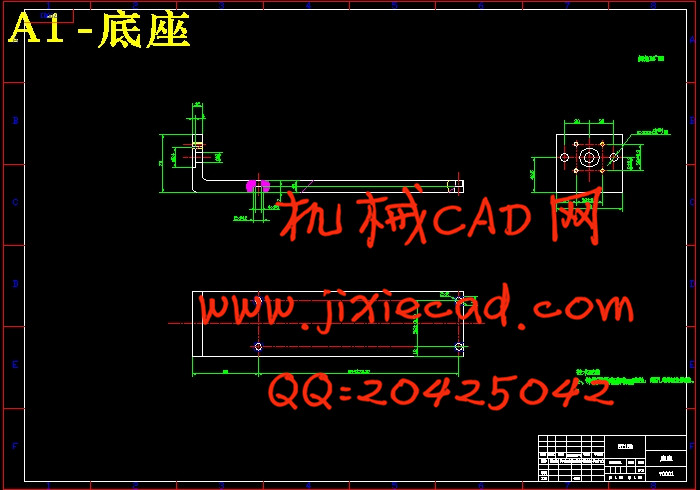
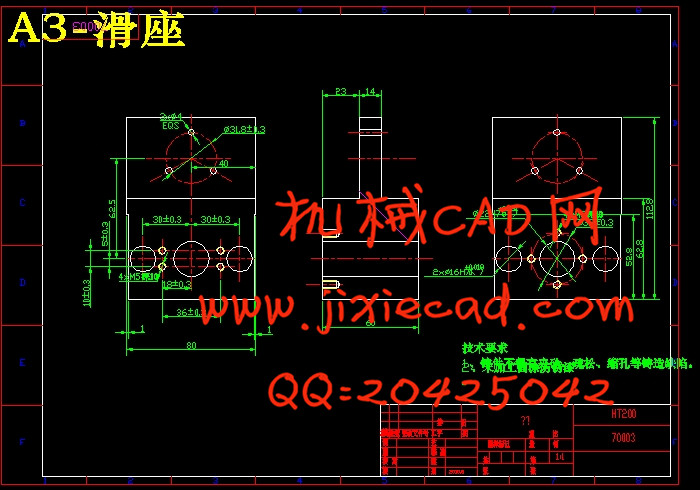
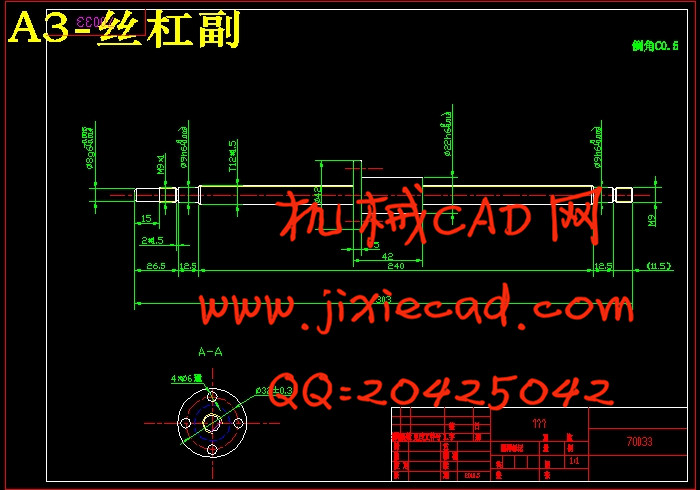
本文设计了一套手指力学特性测量装置,该装置包括机械结构和控制系统两部分。机械结构包括步进电机和升降机构,以及力传感器,本文对其进行了设计,最后给出了机械结构装配图。通过步进电机对升降机构的调节来达到测量的目的。控制部分采用开环结构,对步进电机进行控制,最后给出系统框图。
关键词 虚拟现实 传感器 手指力学 步进电机
Abstract
For improving the immersion and authenticity of virtual hand interaction, a method of measuring contact force of virtual hand considering the finger mechanical properties in virtual environments was presented. As the development of Virtual Reality Technology, human-computer Interaction Systerm can't be satisefied with only by vision and auditory sensation. It becomes more essential and urgent on the simulation and reproduction of force sense and the sense of touch.
This paper designs a set of finger mechanical properties measurement device which includes the mechanical structure and control system. The mechanical structure consists of Stepper motor, lifting mechanism and force sensor. After designing it we get the mechanical structure assembly drawing. We achieve the measurement purpose by the regulation of the stepper mottor to the lifting mechanism. The control system uses the Open-loop structure to control the stepper motor and then give out the system chart.
Keywords Virtual Reality Technology sensor mechanical properties of finger stepper mottor
目 录
1 绪论……………………………………………………………………………………………1
1.1 手指力学建模……………………………………………………………………………1
1.2 手指力学研究现状……………………………………………………………………2
1.3 论文研究题目的提出……………………………………………………………………3
2 总体结构设计及传感器选型……………………………………………………………4
2.1 测量装置总体结构设计…………………………………………………………………4
2.2 力传感器选型…………………………………………………………………………4
3 测量装置机械结构设置…………………………………………………………………7
3.1 机械结构的设计…………………………………………………………………………7
3.2 升降机构的设计…………………………………………………………………………22
4 控制系统的设计…………………………………………………………………………23
4.1 步进电机工作原理……………………………………………………………………23
4.2 步进电机驱动与控制策略综述………………………………………………………24
4.3 控制系统设计与实现…………………………………………………………………26
结论………………………………………………………………………………………………31
致谢………………………………………………………………………………………………32
参考文献 ………………………………………………………………………………………33
本文设计了一套手指力学特性测量装置,该装置包括机械结构和控制系统两部分。机械结构包括步进电机和升降机构,以及力传感器,本文对其进行了设计,最后给出了机械结构装配图。通过步进电机对升降机构的调节来达到测量的目的。控制部分采用开环结构,对步进电机进行控制,最后给出系统框图。
关键词 虚拟现实 传感器 手指力学 步进电机
Abstract
For improving the immersion and authenticity of virtual hand interaction, a method of measuring contact force of virtual hand considering the finger mechanical properties in virtual environments was presented. As the development of Virtual Reality Technology, human-computer Interaction Systerm can't be satisefied with only by vision and auditory sensation. It becomes more essential and urgent on the simulation and reproduction of force sense and the sense of touch.
This paper designs a set of finger mechanical properties measurement device which includes the mechanical structure and control system. The mechanical structure consists of Stepper motor, lifting mechanism and force sensor. After designing it we get the mechanical structure assembly drawing. We achieve the measurement purpose by the regulation of the stepper mottor to the lifting mechanism. The control system uses the Open-loop structure to control the stepper motor and then give out the system chart.
Keywords Virtual Reality Technology sensor mechanical properties of finger stepper mottor
目 录
1 绪论……………………………………………………………………………………………1
1.1 手指力学建模……………………………………………………………………………1
1.2 手指力学研究现状……………………………………………………………………2
1.3 论文研究题目的提出……………………………………………………………………3
2 总体结构设计及传感器选型……………………………………………………………4
2.1 测量装置总体结构设计…………………………………………………………………4
2.2 力传感器选型…………………………………………………………………………4
3 测量装置机械结构设置…………………………………………………………………7
3.1 机械结构的设计…………………………………………………………………………7
3.2 升降机构的设计…………………………………………………………………………22
4 控制系统的设计…………………………………………………………………………23
4.1 步进电机工作原理……………………………………………………………………23
4.2 步进电机驱动与控制策略综述………………………………………………………24
4.3 控制系统设计与实现…………………………………………………………………26
结论………………………………………………………………………………………………31
致谢………………………………………………………………………………………………32
参考文献 ………………………………………………………………………………………33