设计简介
摘 要
自然灾害,尤其是煤矿瓦斯煤尘爆炸事故发生后,矿井环境十分复杂,井下人员面临极其危险的状况,需尽快地转移与救护;而搜救工作异常困难和危险,往往在救援工作中造成救护人员的伤亡。研发代替或部分代替救护人员及时、快速深入矿井灾区进行环境探测和搜救工作的救灾机器人具有极其重要的意义。
本论文研究工作的目的是设计结构新颖、具有独立可操作性的、抗击一定冲击和越障能力的履带式移动机器人,以适应在复杂环境和崎岖路况下工作。本研究意义在于为后续设计的搜救机器人提供一个基础的动力平台,以便于能够开发出更多使用功能的搜救机器人,特别是提供一个坚实的移动平台,搭载一些搜救设备,为井上人员提供救援信息,设计合理救援方案,缩短救援时间,减少伤亡。
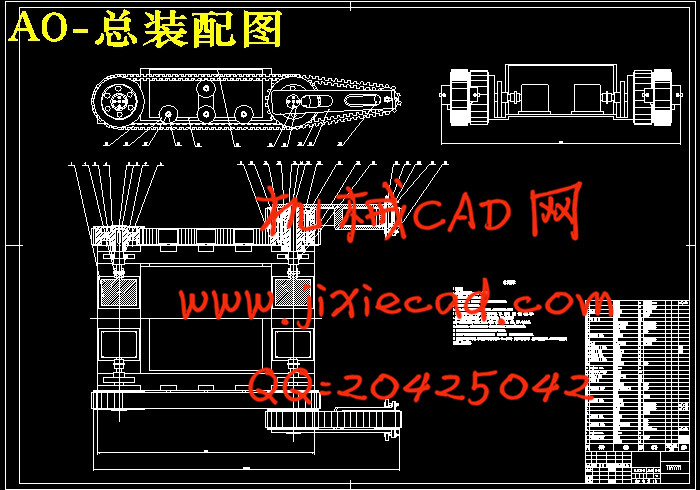
本设计的搜救机器人移动方案是履带式驱动结构。该方案采用模块化设计,便于拆卸维修,可以分段自适应复杂路面,并可主动控制两侧翼板模块的转动来调节机器人姿态变化,辅助爬坡、越障和跨沟;机器人经过合理的结构布局和设计后具有良好的环境适应能力、机动能力并能抵抗一定高度的掉落冲击。所设计的机器人移动机构主要由四部分组成:主动轮减速驱动机构、翼板转动机构、自适应路面执行机构、履带及履带轮运动机构。对此设计作部件的设计,以及强度校核,最后形成设计理念。
关键字:搜救机器人;复合移动机构;模块化设计;
Abstract
Natural disasters, particularly coal gas coal-dust explosion accident happens, the mine environment is very complex, miners face extremely dangerous situation, it is necessary to transfer and ambulance as soon as possible; And search and rescue work more difficult and dangerous, often in the relief work by ambulance staff casualties. Research and development instead of or part of the rescue personnel to replace mine disaster area, rapidly environmental detection and search and rescue work of the rescue robot has very important significance.
This paper studies the purpose of the work is the design of novel structure, has an independent class of operation, resistance to certain impact and the obstacles of the ability to track mobile robot, and to adapt to the complex environment and rugged work conditions. This research significance lies in the design for the follow-up of the search and rescue robot provide a fundamental dynamic platform, in order to be able to develop more function of search and rescue robot, especially to provide a solid mobile platform, playing in some search and rescue equipment, to provide relief information inoue, reasonable design rescue plan, shorten the rescue time, reduce casualties.
We design the mobile search and rescue robot scheme is crawler drive structure. The scheme adopts the modular design, easy to remove the maintenance, can block the adaptive complex pavement, and to control the rotation of the two flanks board module to adjust the robot attitude change, auxiliary climbing, the disabled and across the
自然灾害,尤其是煤矿瓦斯煤尘爆炸事故发生后,矿井环境十分复杂,井下人员面临极其危险的状况,需尽快地转移与救护;而搜救工作异常困难和危险,往往在救援工作中造成救护人员的伤亡。研发代替或部分代替救护人员及时、快速深入矿井灾区进行环境探测和搜救工作的救灾机器人具有极其重要的意义。
本论文研究工作的目的是设计结构新颖、具有独立可操作性的、抗击一定冲击和越障能力的履带式移动机器人,以适应在复杂环境和崎岖路况下工作。本研究意义在于为后续设计的搜救机器人提供一个基础的动力平台,以便于能够开发出更多使用功能的搜救机器人,特别是提供一个坚实的移动平台,搭载一些搜救设备,为井上人员提供救援信息,设计合理救援方案,缩短救援时间,减少伤亡。
本设计的搜救机器人移动方案是履带式驱动结构。该方案采用模块化设计,便于拆卸维修,可以分段自适应复杂路面,并可主动控制两侧翼板模块的转动来调节机器人姿态变化,辅助爬坡、越障和跨沟;机器人经过合理的结构布局和设计后具有良好的环境适应能力、机动能力并能抵抗一定高度的掉落冲击。所设计的机器人移动机构主要由四部分组成:主动轮减速驱动机构、翼板转动机构、自适应路面执行机构、履带及履带轮运动机构。对此设计作部件的设计,以及强度校核,最后形成设计理念。
关键字:搜救机器人;复合移动机构;模块化设计;
Abstract
Natural disasters, particularly coal gas coal-dust explosion accident happens, the mine environment is very complex, miners face extremely dangerous situation, it is necessary to transfer and ambulance as soon as possible; And search and rescue work more difficult and dangerous, often in the relief work by ambulance staff casualties. Research and development instead of or part of the rescue personnel to replace mine disaster area, rapidly environmental detection and search and rescue work of the rescue robot has very important significance.
This paper studies the purpose of the work is the design of novel structure, has an independent class of operation, resistance to certain impact and the obstacles of the ability to track mobile robot, and to adapt to the complex environment and rugged work conditions. This research significance lies in the design for the follow-up of the search and rescue robot provide a fundamental dynamic platform, in order to be able to develop more function of search and rescue robot, especially to provide a solid mobile platform, playing in some search and rescue equipment, to provide relief information inoue, reasonable design rescue plan, shorten the rescue time, reduce casualties.
We design the mobile search and rescue robot scheme is crawler drive structure. The scheme adopts the modular design, easy to remove the maintenance, can block the adaptive complex pavement, and to control the rotation of the two flanks board module to adjust the robot attitude change, auxiliary climbing, the disabled and across the
channel; Robot after reasonable structure layout and design with good ability to adapt to the environment, mobility and resistant to a certain degree drop impact. The mobile mechanism of the robot design mainly consists of four parts: active pinwheel reducer drive mechanism, wing turn institutions, adaptive pavement actuators, caterpillar and track the movement institutions. We are for parts design of design, and intensity, the final shape design theory.
Key words: search and rescue robots; composite mobile body; modular design
目录
前 言 1Key words: search and rescue robots; composite mobile body; modular design
目录
1 绪 论 3
1.1 课题研究背景及意义 3
1.1.1 课题研究背景 3
1.1.2 课题研究意义 4
1.2 国内外的研究概况 6
1.2.1 国外研究现状 6
1.2.2国内研究现状 8
1.2.3 发展趋势 9
2 搜救机器人的总体结构方案设计 13
2.1 井下复杂环境对救灾机器人的要求 13
2.2 典型移动机构方案论证分析 14
2.2.1 轮式移动机构特点 14
2.2.2 腿式移动机构特点 15
2.2.3 履带式移动机构特点 16
2.2.4 履、腿式移动机构特点 17
2.2.5 轮、履、腿式移动机构性能比较 18
2.3 研究设计采用的行走机构 18
2.4 救灾机器人性能指标与设计 19
2.5本章小结 21
3搜救机器人运动参数设计计算 22
3.1搜救机器人越障分析 22
3.1.1搜救机器人跨越台阶 22
3.1.2搜救机器人跨越沟槽 24
3.2搜救机器人斜坡运动分析 25
3.3 本章小结 26
4驱动电机的选则 26
4.1基于平地的最大速度的电机功率计算 26
4.2爬坡最大坡度的驱动电机功率计算 27
4.3 本章小结 28
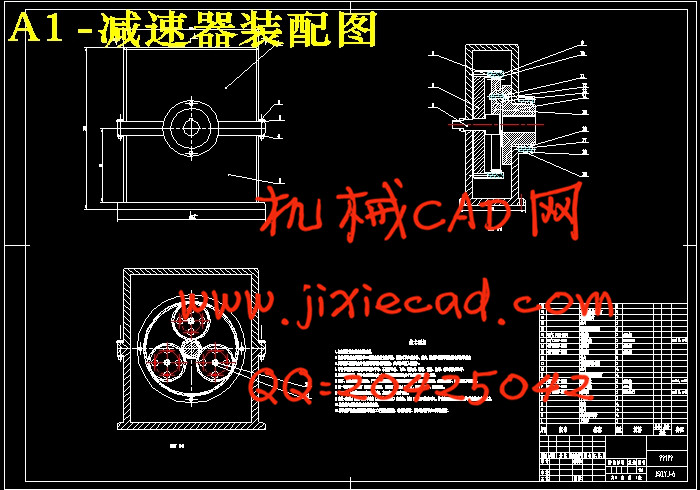
5 驱动轮减速器设计 30
5.1减速器方案分析 30
5.1.1减速器应满足的要求 30
5.1.2 减速器方案分析 30
5.2 减速器的设计计算 32
5.2.1减速器的传动方案分析 32
5.2.2配齿计算 32
5.2.3初步计算齿轮的主要参数 33
5.2.4装配条件的计算 38
5.2.5高速级齿轮强度的验算 39
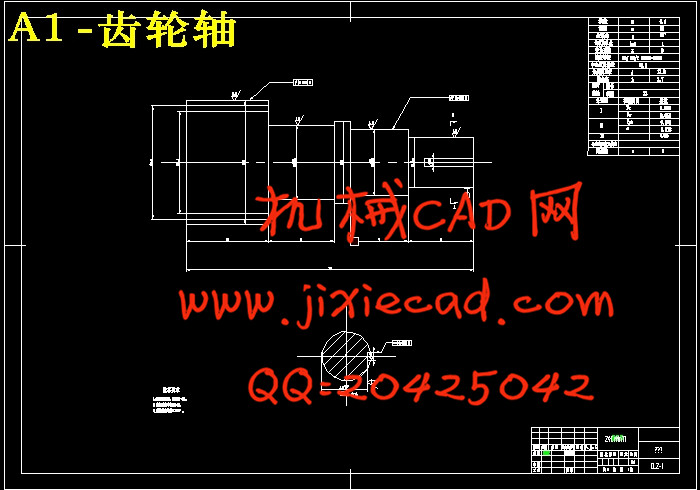
5.2.6 轴的设计及校核 48
5.3 本章小结 51
6移动机构履带及翼板部分设计 52
6.1.1 确定带的型号和节距 53
6.1.2确定主从动轮直径 54
6.2 翼板部分设计 54
6.3 摆臂作用概述 55
致 谢 58