设计简介
中文摘要
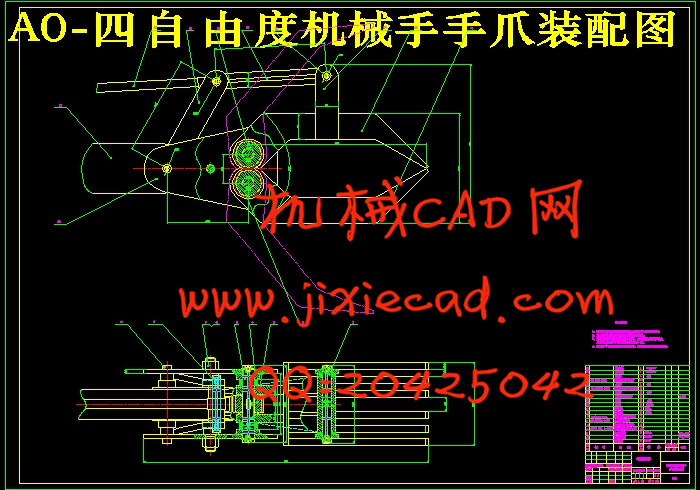
随着对海底、地下资源和宇宙空间的合理开发和利用,高温、高压、强辐射、窒息等极限环境的作业将经常遇到,在这种人们难以靠近或非常危险的场所,由处在安全场所的操作者通过一种有效的通信系统操纵机械手进入危险的场所进行远距离操作,把人从恶劣、危险的作业环境中替换出来。这种操作方式正作为一种有效的手段被开发利用。随着社会的进步与经济的发展,人们对遥操作机器人提出了越来越高的要求,具有无线通信的遥操作机器人系统将在未来的生活及特殊领域的工作中发挥其得天独厚的和无可替代的作用,创造出巨大的经济效益与社会效益。机械手是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。机械手的机械结构采用滚珠丝杆、液压缸等机械器件组成;电气方面有驱动模块、传感器、开关电源、电磁阀、等电子器件组成。该装置涵盖了可编程控制技术,位置控制技术、气动技术、检测技术等,是机电一体化的典型代表仪器之一。本课题开发的机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的要求随时更改相关参数。关键词:机械手 遥操作 力反馈 工程机器人 电液伺服系统
Abstract
With the reasonable exploitation and use of the submarine and underground resources and the space in the universe, we have to be faced with the extreme environment such as high temperature, heavy pressure, heavy radiation or suffocation. In order to do work in these difficult-to-approach or dangerous places, the operators can do it far by an effective telecommunication system----remotely controlling a robot, freeing human workers from these dangerous working environments. This operating method is being exploited as a means of effective one. With the development of society and economy, there are more and more demands for the remotely-controlled robot. The tele-robot system will be of unique superiority in the future life and certain special fields. And it should have great effect on society and economy. The robot arm is the traditional task-operating component in the industrial robot system, and is one of the key components. The machine structure consists of the bead curl pole, slippery pole and cylinder. This equipment is composed of the programmable control technique, the position control technique, air driving technique, the monitor technique, and is one of the typical representation of the integration of mechanism and electricity. This topic draw up the material porterage the machine hand of the development and can grasp to put the object in the space, act vivid and diverse, the commutability artificial carries on the task in the area of the heat and danger, and at any time change the related parameter according to the difference of the workplace and the request of the product processes.Keywords:Robot manipulator Tele-operation Force feedback
Construction Robot Electro-hydraulic servo system
目 录
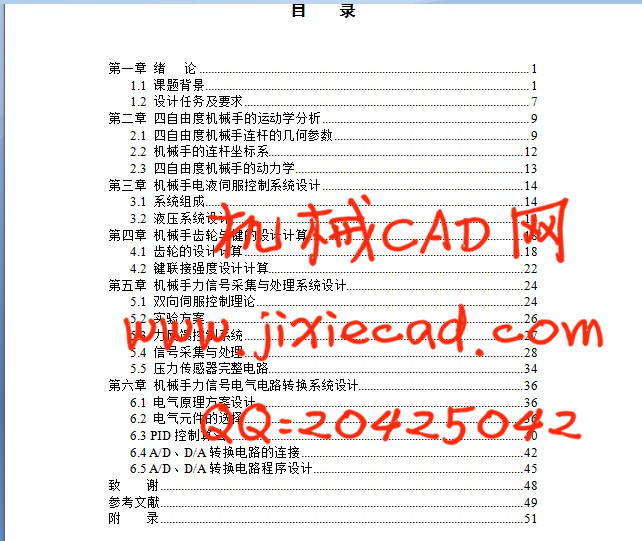
第一章 绪 论 1
1.1 课题背景 1
1.2 设计任务及要求 7
第二章 四自由度机械手的运动学分析 9
2.1 四自由度机械手连杆的几何参数 9
2.2 机械手的连杆坐标系 12
2.3 四自由度机械手的动力学 13
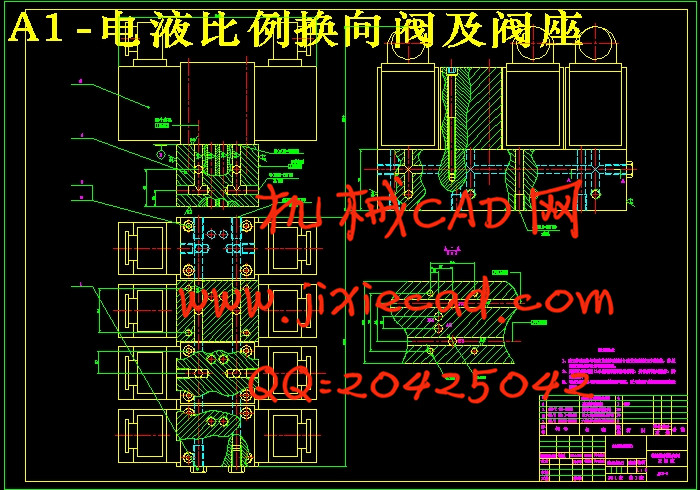
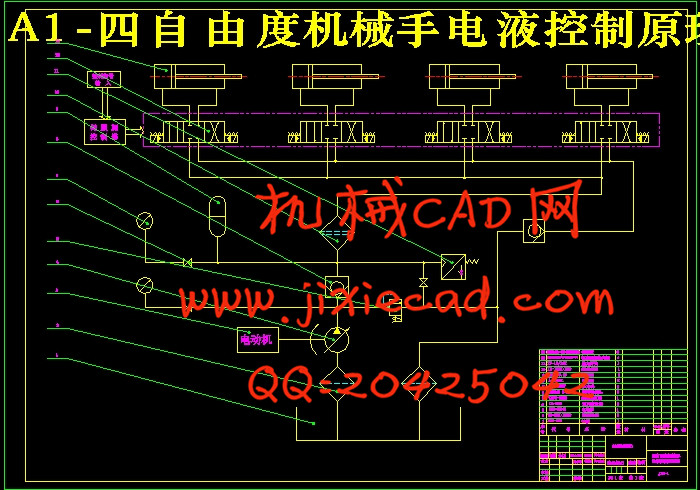
第三章 机械手电液伺服控制系统设计 14
3.1 系统组成 14
3.2 液压系统设计 14
第四章 机械手齿轮与键的设计计算 18
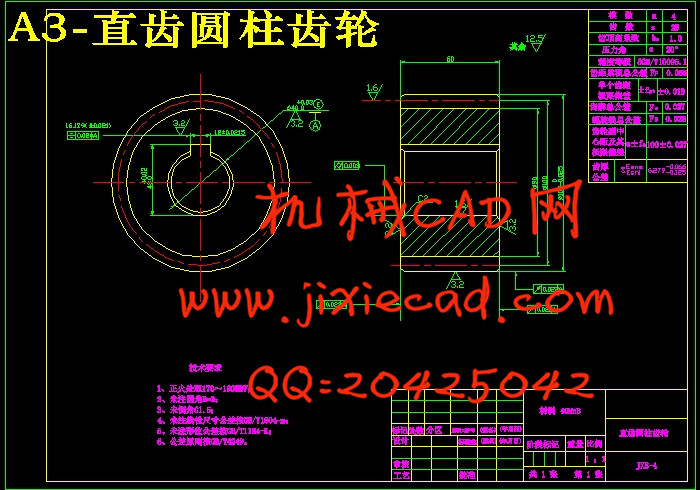
4.1 齿轮的设计计算 18
4.2 键联接强度设计计算 22
第五章 机械手力信号采集与处理系统设计 24
5.1 双向伺服控制理论 24
5.2 实验方案 26
5.3 力反馈控制系统 27
5.4 信号采集与处理 28
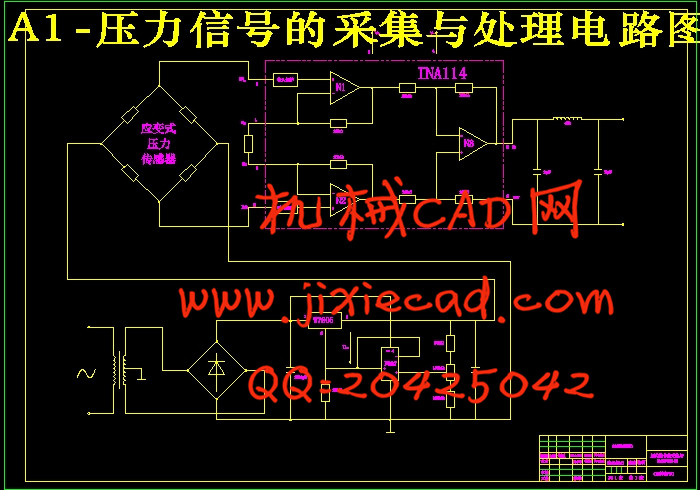
5.5 压力传感器完整电路 34
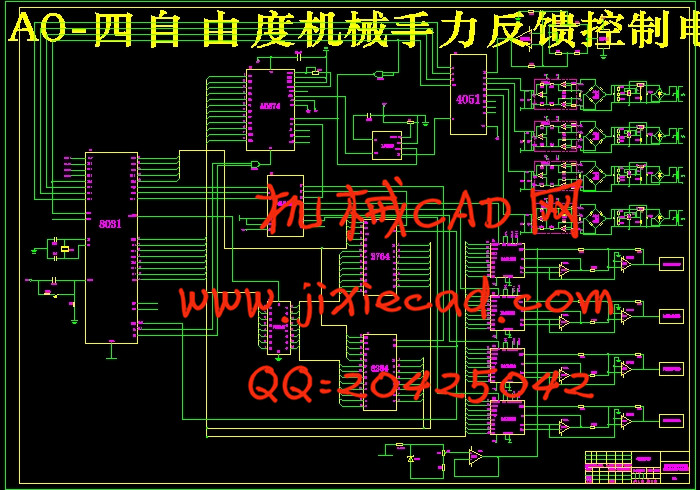
第六章 机械手力信号电气电路转换系统设计 36
6.1 电气原理方案设计 36
6.2 电气元件的选择 36
6.3 PID控制算法 40
6.4 A/D、D/A转换电路的连接 42
6.5 A/D、D/A转换电路程序设计 45
致 谢 48
参考文献 49