设计简介
摘 要
随着社会的进步,经济的发展,数控技术已经越来越重要了,而且数控技术是先进制造技术的核心,是人类进步的一个很重要的阶梯。机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。因此,在机械加工中得到越来越广泛的应用。
机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
关键词:机械手,加工工艺,液压系统
第一章 前 言 5
1.1 机械手的用途说明 5
1.2 机械手的目的、意义 5
1.3 设计的指导思想,应达到的技术性能要求 5
第二章 设计方案论证 7
2.1 机械手设计的原始数据 7
2.1.1 组成结构 7
2.1.2 执行机构 7
2.1.3 驱动机构 7
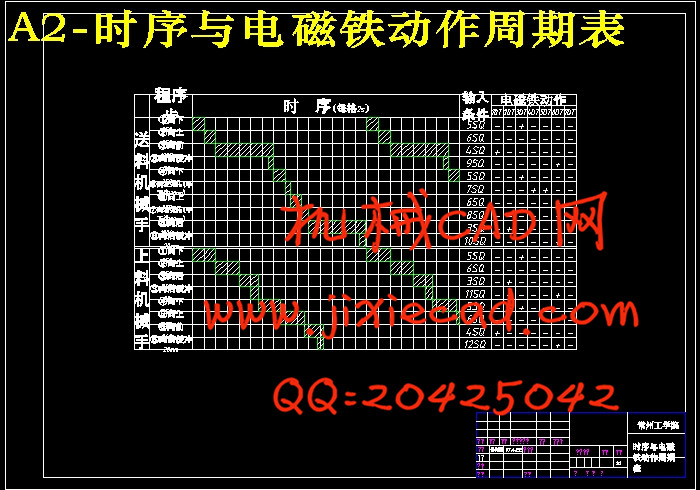
2.1.4 控制系统 7
2.1.5 位置检测装置 8
2.2 机械手的运动方案论证 8
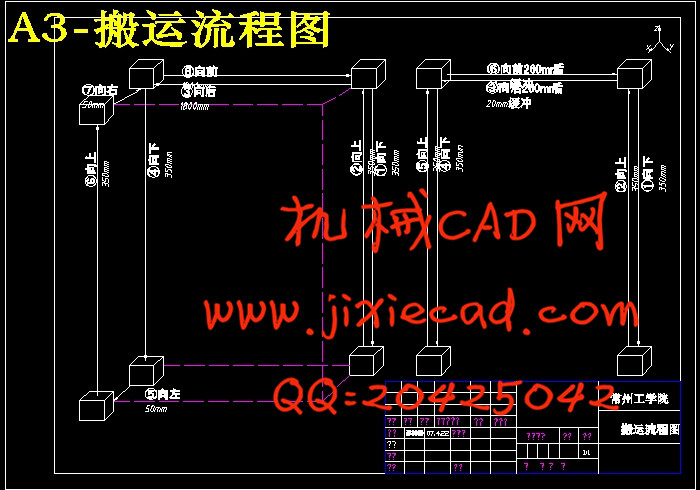
2.2.1 机械手的运动形式(坐标形式)确定 8
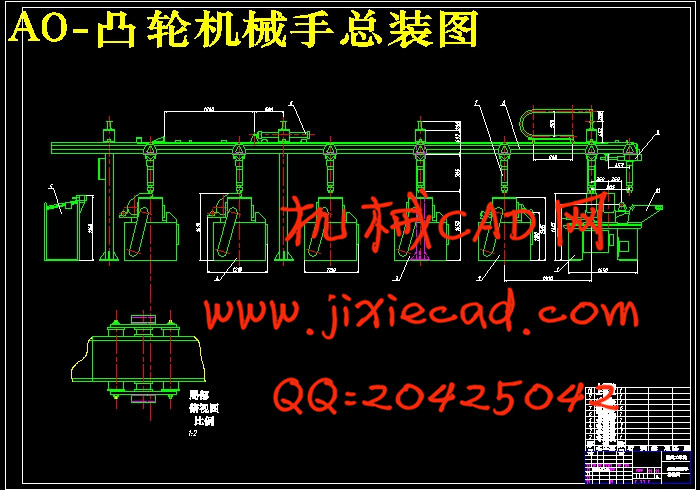
第三章 机械手各组成部件设计计算 10
3.1 抓取机械设计 10
3.1.1 抓取机械机构的基本要求 10
3.1.2 手爪夹紧力的计算 12
3.1.3 手爪的驱动装置的选择与驱动力计算 13
3.2 手腕机构 13
3.2.1 手腕的作用和动作 13
3.3 手臂设计 14
3.3.1 机械手手臂应满足的基本要求: 14
3.3.2 为满足基本要求而采取的机构、工艺性措施 14
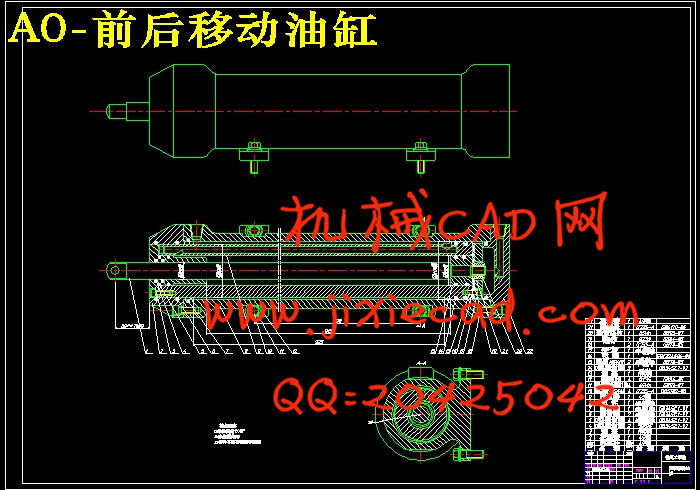
3.3.3 手臂伸缩运动的结构设计 15
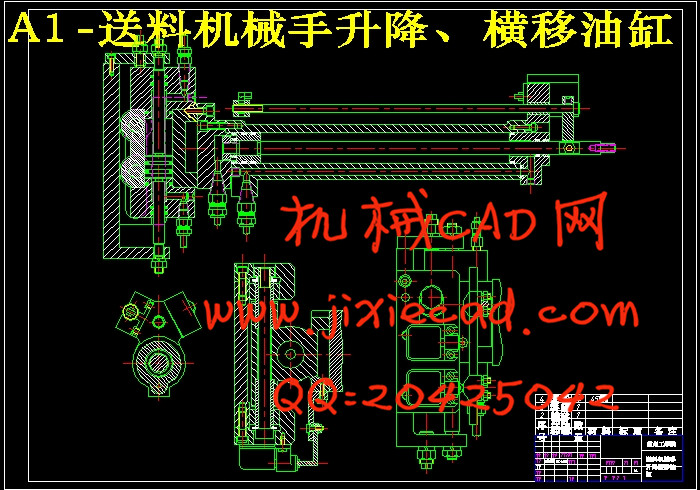
3.3.4 手臂升降运动的结构设计 17
3.3.5 手臂回转运动的结构设计 19
3.4 缓冲装置设计 20
3.4.1 缓冲方式的确定 20
3.5 定位机构设计 21
3.5.1 定位方式的选择确定 21
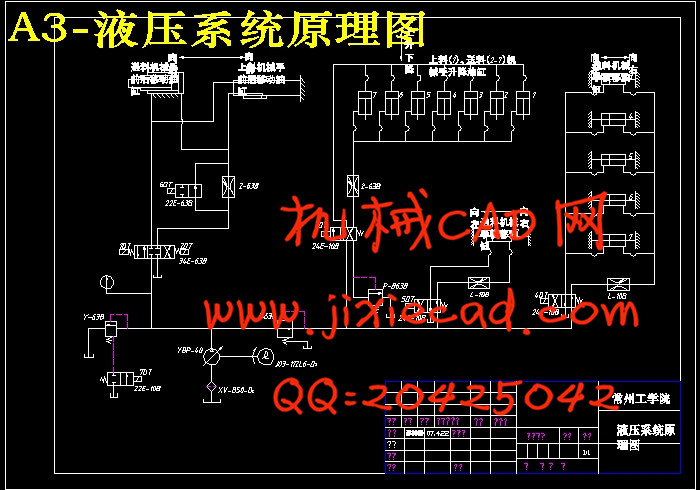
3.6 机械手驱动系统选择 22
3.6.1 驱动方式的选择 22
3.6.2 下面是液动与气动方式特点的比较 22
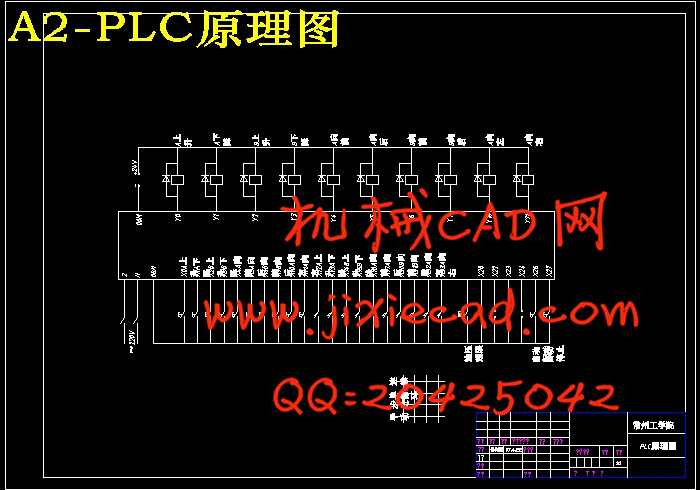
第四章 机械手控制系统设计 23
4.1 机械手的控制方式的选择 23
4.2 本控制方式的特点 23
设计总结 24
随着社会的进步,经济的发展,数控技术已经越来越重要了,而且数控技术是先进制造技术的核心,是人类进步的一个很重要的阶梯。机械手是模仿人手的动作,生产中应用机械手可以提高自动化水平和劳动生产率,可以减轻劳动强度,保证产品质量,实现安全生产,尤其在恶劣的劳动条件下,它代替人作业的意义更加重大。因此,在机械加工中得到越来越广泛的应用。
机械手是利用PLC控制整个系统实现各种运动的自动化控制,且能用于教学演示。
关键词:机械手,加工工艺,液压系统
第一章 前 言 5
1.1 机械手的用途说明 5
1.2 机械手的目的、意义 5
1.3 设计的指导思想,应达到的技术性能要求 5
第二章 设计方案论证 7
2.1 机械手设计的原始数据 7
2.1.1 组成结构 7
2.1.2 执行机构 7
2.1.3 驱动机构 7
2.1.4 控制系统 7
2.1.5 位置检测装置 8
2.2 机械手的运动方案论证 8
2.2.1 机械手的运动形式(坐标形式)确定 8
第三章 机械手各组成部件设计计算 10
3.1 抓取机械设计 10
3.1.1 抓取机械机构的基本要求 10
3.1.2 手爪夹紧力的计算 12
3.1.3 手爪的驱动装置的选择与驱动力计算 13
3.2 手腕机构 13
3.2.1 手腕的作用和动作 13
3.3 手臂设计 14
3.3.1 机械手手臂应满足的基本要求: 14
3.3.2 为满足基本要求而采取的机构、工艺性措施 14
3.3.3 手臂伸缩运动的结构设计 15
3.3.4 手臂升降运动的结构设计 17
3.3.5 手臂回转运动的结构设计 19
3.4 缓冲装置设计 20
3.4.1 缓冲方式的确定 20
3.5 定位机构设计 21
3.5.1 定位方式的选择确定 21
3.6 机械手驱动系统选择 22
3.6.1 驱动方式的选择 22
3.6.2 下面是液动与气动方式特点的比较 22
第四章 机械手控制系统设计 23
4.1 机械手的控制方式的选择 23
4.2 本控制方式的特点 23
设计总结 24