设计简介
摘要
机械手技术涉及到电子、机械学、自动控制技术、传感器技术和计算机技术等科学领域,是一门学科综合技术。机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、帮运或操作动作的自动化装置。工业机械手是近几十年发展起来的一种高科技自动生产设备,它也是工业机器人的一个重要分支,在构造和性能兼有人和机器各自的优点,尤其体现在人世的智能和适应性。机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
本课题针对机械制造业的生产特点,设计一种用于拾取轴类零件的气动式机械手,以实现轴类零件搬运过程的自动化,减轻生产劳动强度,提高生产效率。本课题设计一种用于塑料注塑成型领域的旋臂式机械手,以提高自动化生产效率。
论文主要研究内容:
(1)了解工业机器人的发展及在工业生产中的应用;
(2)完成该旋臂式机械手的方案设计;
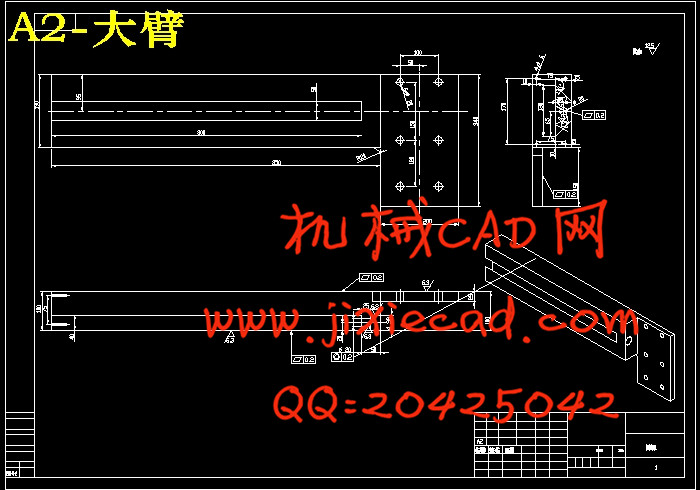
(3)旋臂式机械手的零部件结构设计及计算;
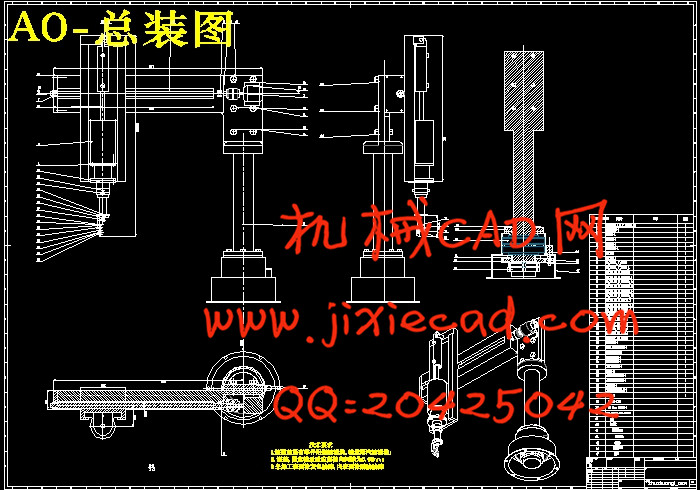
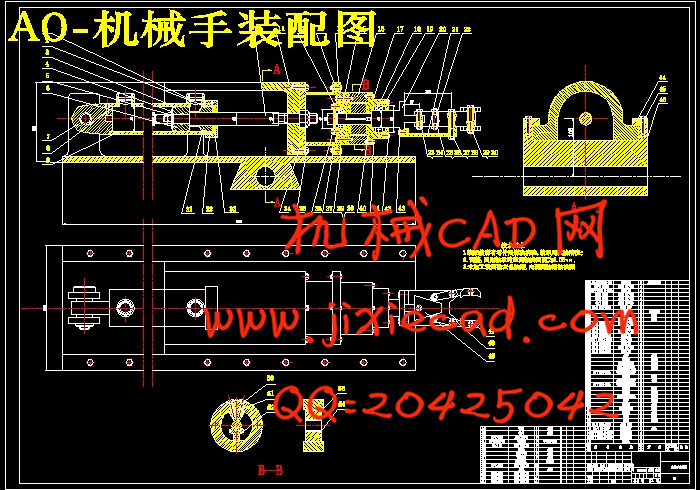
(4)应用PRO/E和AutoCAD软件绘制所设计机械手的装配图及关键零部件的三维图和工程图。
关键词:旋臂式;机械手;PRO/E;工业机器人
Abstract
Manipulator technology involves electronic, mechanical, automatic control technology, the sensor technology and computer technology, scientific fields, is a scientific discipline comprehensive technology. Manipulator is part of the action, imitation of manpower according to the given program, track and demanding acquirement, help nonshipment or operation action of automation devices. Industrial robot developed in recent years is a high-tech automatic production equipment, it is also an important branch of the industrial robot in both man and machine structure and performance of their respective advantages, especially embodied in living intelligence and adaptability. Manipulator and the accuracy of environment homework ability to finish the homework in the national economy, has wide development space.
This topic for mechanical manufacturing production characteristics, design a kind of shaft parts in order, in order to realize the pneumatic manipulator handling axial parts automate the process, reduce production labor intensity and improve production efficiency. This topic design for a plastic molding field back brachial type of manipulator, to improve automation production efficiency.
Thesis research content:
(1) to understand the development of industrial robots and the application in industrial production;
(2) complete the spiral arm type manipulator design;
(3) back brachial type and structure design of the manipulator parts computation;
(4) application PRO/E and AutoCAD software drawing design drawings and key components of the manipulator of three-dimensional graph and engineering drawings.
Keywords: spiral arm type; Manipulator; PRO/E; Industrial robots
目录
摘要 4
Abstract 5
第一章 前言 6
1.1工业机器人概述 6
1.2工业机器人的基本型式及其运动形式 7
1.2.1直角坐标式机械手 7
1.2.2圆柱坐标式机械手 8
1.2.3球坐标式机械手 8
1.2.4关节式机械手 8
1.3工业机器人的机能和特性 9
1.3.1工业机械手的自由度 9
1.3.2工业机械手的机能 9
1.4工业机器人的发展趋势与前景 10
1.4.1重复高精度 10
1.4.2模块化 10
1.4.3无给油化 11
1.4.4机电一体化 11
1.5本课题的研究内容 11
第二章 旋臂式机械手的方案设计 12
2.1旋旋臂式机械手方案拟定 12
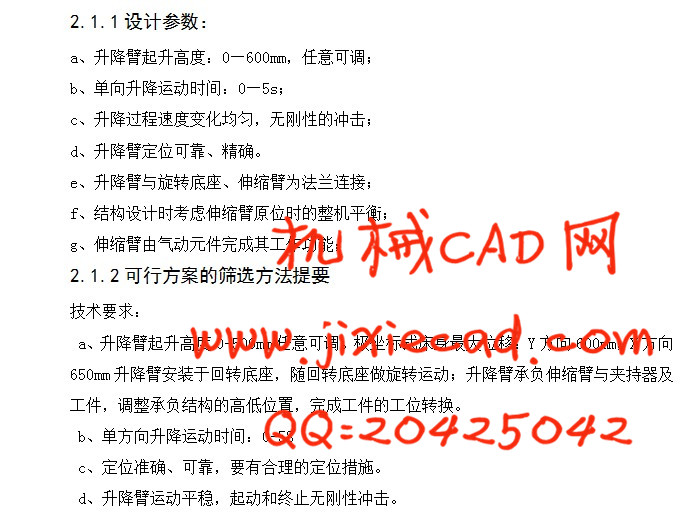
2.1.1设计参数: 15
2.1.2可行方案的筛选方法提要 15
2.2设计方案的选择 15
2.2.1圆柱坐标(直线移动)升降臂 15
2.2.2极坐标(旋转升降式)升降臂 15
2.2.3气压驱动方案设计 16
2.2.4机械驱动方案设计 16
2.2.5传动系统结构设计 16
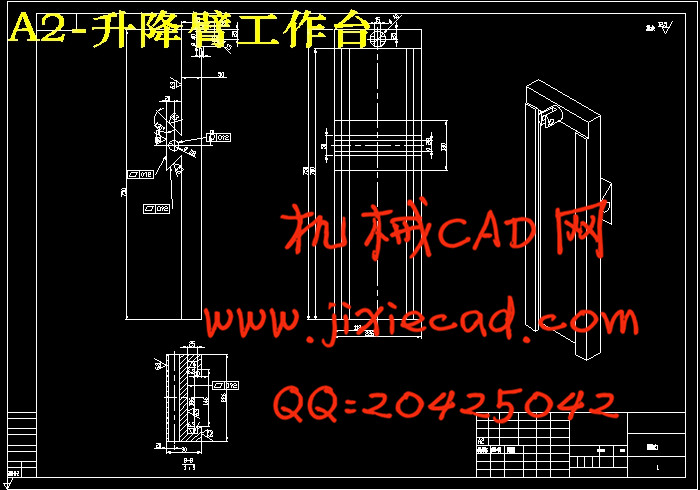
2.6升降臂的设计所选方案 20
2.6.1机械手升降臂设计 20
2.6.2运动方案 20
2.6.3设计内容 20
2.7具体方案 20
2.7.1驱动系统的选择计算 20
2.7.2 气压缸的选择 20
2.7.3大臂导轨的设计与计算 23
第三章 旋臂式机械手夹持器设计 25
3.1旋臂式机械手夹持器设计的基本要求 25
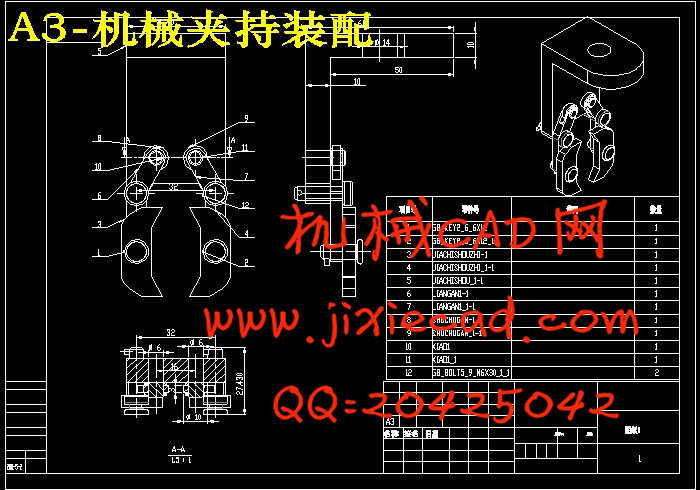
3.2机械手夹持器结构设计 25
3.2.1机械手夹紧装置设计. 25
3.2.2机械手手爪的夹持误差及分析 29
3.2.3楔块等尺寸的确定 32
3.2.4材料及连接件选择 35
第四章 机械手的腕部设计 37
4.1腕部设计的基本要求 37
4.2具有一个自由度的回转缸驱动的典型腕部结构 37
4.3腕部结构计算 38
4.3.1腕部回转力矩的计算 38
4.3.2回转气压缸所驱动力矩计算 40
4.3.3回转缸内径D计算 41
4.3.4气压缸盖螺钉的计算 42
4.3.5静片和输出轴间的连接螺钉 44
4.3.6腕部轴承选择 45
4.3.7材料及连接件,密封件选择 45
第五章 机械手的伸缩臂设计 47
5.1伸缩臂设计基本要求 47
5.2方案设计 48
5.3伸缩臂机构结构设计 49
5.3.1伸缩臂气压缸参数计算 50
5.3.2导向杆机构设计 57
5.4腰部步进电机的选型计算 59
5.5旋臂式机械手的PRO/E装配模型 62
总结 63
参考文献 64
机械手技术涉及到电子、机械学、自动控制技术、传感器技术和计算机技术等科学领域,是一门学科综合技术。机械手是模仿人手的部分动作,按给定程序、轨迹和要求实现自动抓取、帮运或操作动作的自动化装置。工业机械手是近几十年发展起来的一种高科技自动生产设备,它也是工业机器人的一个重要分支,在构造和性能兼有人和机器各自的优点,尤其体现在人世的智能和适应性。机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
本课题针对机械制造业的生产特点,设计一种用于拾取轴类零件的气动式机械手,以实现轴类零件搬运过程的自动化,减轻生产劳动强度,提高生产效率。本课题设计一种用于塑料注塑成型领域的旋臂式机械手,以提高自动化生产效率。
论文主要研究内容:
(1)了解工业机器人的发展及在工业生产中的应用;
(2)完成该旋臂式机械手的方案设计;
(3)旋臂式机械手的零部件结构设计及计算;
(4)应用PRO/E和AutoCAD软件绘制所设计机械手的装配图及关键零部件的三维图和工程图。
关键词:旋臂式;机械手;PRO/E;工业机器人
Abstract
Manipulator technology involves electronic, mechanical, automatic control technology, the sensor technology and computer technology, scientific fields, is a scientific discipline comprehensive technology. Manipulator is part of the action, imitation of manpower according to the given program, track and demanding acquirement, help nonshipment or operation action of automation devices. Industrial robot developed in recent years is a high-tech automatic production equipment, it is also an important branch of the industrial robot in both man and machine structure and performance of their respective advantages, especially embodied in living intelligence and adaptability. Manipulator and the accuracy of environment homework ability to finish the homework in the national economy, has wide development space.
This topic for mechanical manufacturing production characteristics, design a kind of shaft parts in order, in order to realize the pneumatic manipulator handling axial parts automate the process, reduce production labor intensity and improve production efficiency. This topic design for a plastic molding field back brachial type of manipulator, to improve automation production efficiency.
Thesis research content:
(1) to understand the development of industrial robots and the application in industrial production;
(2) complete the spiral arm type manipulator design;
(3) back brachial type and structure design of the manipulator parts computation;
(4) application PRO/E and AutoCAD software drawing design drawings and key components of the manipulator of three-dimensional graph and engineering drawings.
Keywords: spiral arm type; Manipulator; PRO/E; Industrial robots
目录
摘要 4
Abstract 5
第一章 前言 6
1.1工业机器人概述 6
1.2工业机器人的基本型式及其运动形式 7
1.2.1直角坐标式机械手 7
1.2.2圆柱坐标式机械手 8
1.2.3球坐标式机械手 8
1.2.4关节式机械手 8
1.3工业机器人的机能和特性 9
1.3.1工业机械手的自由度 9
1.3.2工业机械手的机能 9
1.4工业机器人的发展趋势与前景 10
1.4.1重复高精度 10
1.4.2模块化 10
1.4.3无给油化 11
1.4.4机电一体化 11
1.5本课题的研究内容 11
第二章 旋臂式机械手的方案设计 12
2.1旋旋臂式机械手方案拟定 12
2.1.1设计参数: 15
2.1.2可行方案的筛选方法提要 15
2.2设计方案的选择 15
2.2.1圆柱坐标(直线移动)升降臂 15
2.2.2极坐标(旋转升降式)升降臂 15
2.2.3气压驱动方案设计 16
2.2.4机械驱动方案设计 16
2.2.5传动系统结构设计 16
2.6升降臂的设计所选方案 20
2.6.1机械手升降臂设计 20
2.6.2运动方案 20
2.6.3设计内容 20
2.7具体方案 20
2.7.1驱动系统的选择计算 20
2.7.2 气压缸的选择 20
2.7.3大臂导轨的设计与计算 23
第三章 旋臂式机械手夹持器设计 25
3.1旋臂式机械手夹持器设计的基本要求 25
3.2机械手夹持器结构设计 25
3.2.1机械手夹紧装置设计. 25
3.2.2机械手手爪的夹持误差及分析 29
3.2.3楔块等尺寸的确定 32
3.2.4材料及连接件选择 35
第四章 机械手的腕部设计 37
4.1腕部设计的基本要求 37
4.2具有一个自由度的回转缸驱动的典型腕部结构 37
4.3腕部结构计算 38
4.3.1腕部回转力矩的计算 38
4.3.2回转气压缸所驱动力矩计算 40
4.3.3回转缸内径D计算 41
4.3.4气压缸盖螺钉的计算 42
4.3.5静片和输出轴间的连接螺钉 44
4.3.6腕部轴承选择 45
4.3.7材料及连接件,密封件选择 45
第五章 机械手的伸缩臂设计 47
5.1伸缩臂设计基本要求 47
5.2方案设计 48
5.3伸缩臂机构结构设计 49
5.3.1伸缩臂气压缸参数计算 50
5.3.2导向杆机构设计 57
5.4腰部步进电机的选型计算 59
5.5旋臂式机械手的PRO/E装配模型 62
总结 63
参考文献 64