设计简介
摘
机械手也被称为自动手,能模仿人手和臂部的某些动作功能,用以按固定程序抓取、搬运物件或操作工具。随着工业自动化发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手的设计计算过程。首先,本文介绍了机械手的作用,机械手的组成并进行结构方案设计,同时,本文给出了这台机械手的主要性能规格参量。而后文中全面详尽的讨论了悬挂式工业机械手的手爪、腕部、手臂等主要部件的结构设计,并对臂部平移机构的强度、刚度进行了校核,对腕部驱动力进行了计算。
关键词:悬挂式 工业机械手 设计计算
ABSTRACT
Mechanical arm is known as automatic robotic hand,which can simulate some action of hands and arms to fix,transport and operate.With the need of improving of industrial automation,mechanical arm is becoming more and more significant.the article is narrative the design and calculation.Above all, this article describes the role of mechanical arm.and robot design and structural components.While,it contains performance specifications which are central of whole designs.however it introduces Structural design of gripper, wrist, arm of mechanical arm ,and makes calculation for strength, stiffness and driving force of the wrist .
Keywords: Suspended Industrial Mechanical Arm Design And Calculation.
目
绪论 1
机械手综述 1
机械手国内外发展现况 1
第一章 机械手的发展方向....……………………………………………………………………...2
1.1机械手的技术发展方向 2
1.2机械手的研究意义 3
1.3机械手的设计目的 3
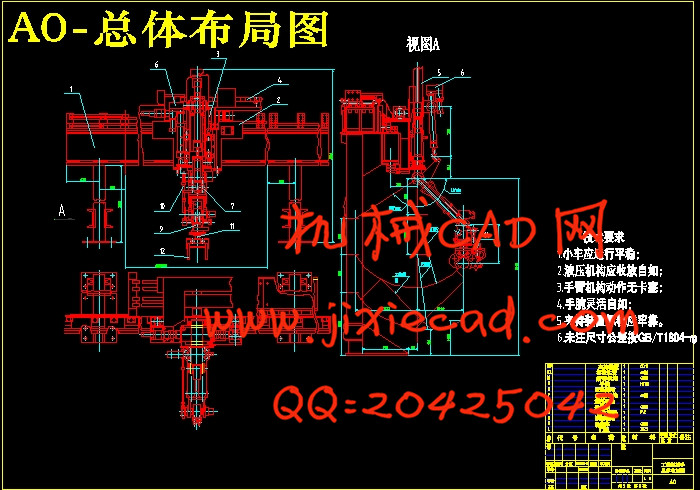
第二章 总体布局设计 4
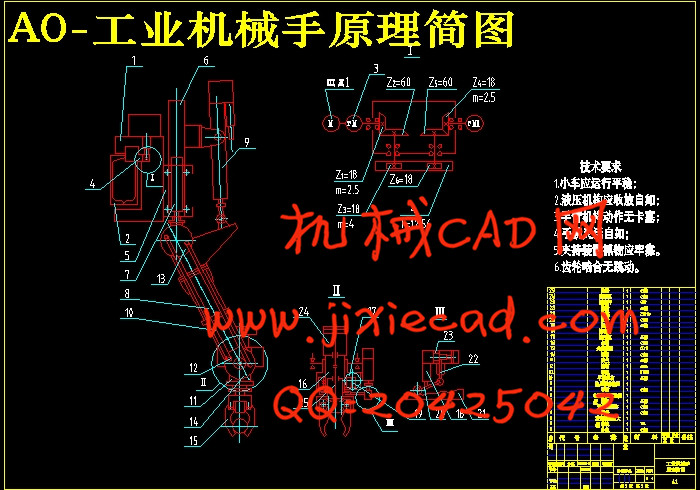
2.1机械手的工作原理 4
2.2基本设计参数 5
2.3结构方案分析 6
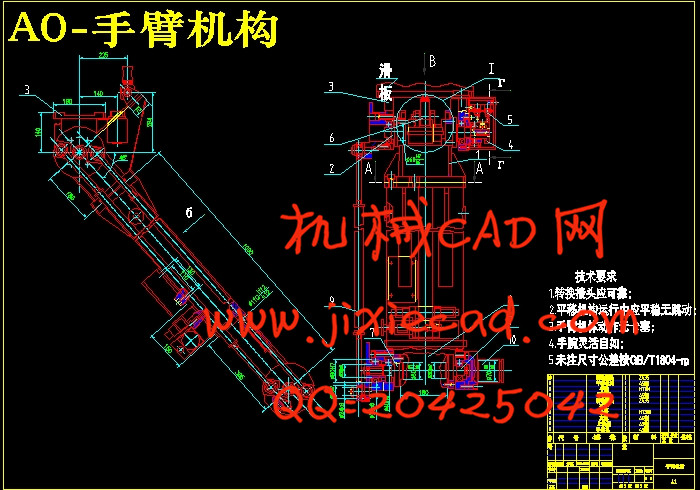
第三章 臂部的设计及有关计算 8
3.1 臂部设计的基本要求 8
3.2 手臂的典型机构以及结构的选择 9
3.2.1 手臂的典型运动机构 9
3.2.2 手臂运动机构的选择 9
3.3 手臂回转运动的驱动力计算 9
3.3.1 手臂平移机构的强度、刚度校核 9
3.3.2 手臂机构设计 10
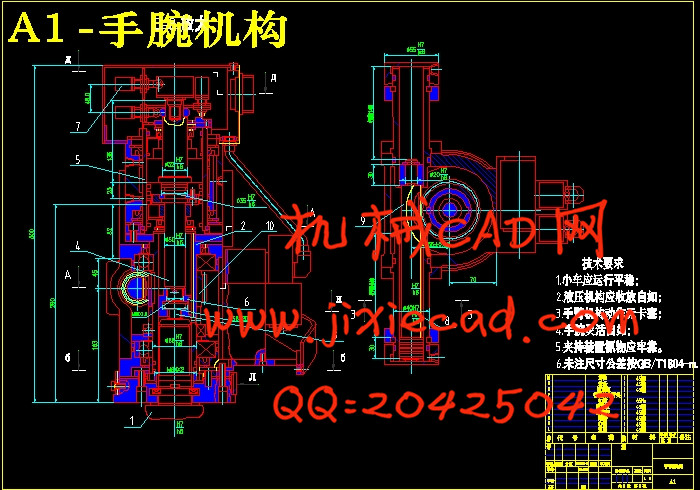
第四章 腕部的设计及有关计算 12
4.1 腕部设计的基本要求 12
4.2 腕部的结构以及选择 12
4.2.1典型的腕部结构 12
4.2.2 腕部结构和驱动机构的选择 12
4.3 腕部的设计计算 12
4.3.1 腕部设计考虑的参数 12
4.3.2 腕部的驱动力矩计算 12
4.3.3 腕部的机构设计 14
第五章 机械手手爪的结构设计 16
5.1机械手末端执行器的设计要求 16
5.2机器人夹持器的运动和驱动方式 16
5.3 机器人夹持器的典型结构 17
5.4设计具体采用方案 17
第六章 工艺规程编制 19
6.1零件分析 19
6.2制定工艺路线…………………...……………………………………………..19
6.3工艺卡片 20
6.4确定工艺方案的原则及注意的问题 23
第七章 PLC在机械手控制系统中的应用 25
7.1 plc概况及在机械手中的应用(这里以日本三菱plcF1—30MR讲解) 25
7.2机械手动作过程 27
7.3 机械手操作方式 27
7.4 PLC程序设计 29
7.4.1机械手的结构...............................................................................................30
7.4.2电气控制的设计...........................................................................................31
7.4.3操作面板及动作说明...................................................................................31
7.5梯形图的总体设计..............................................................................................34
7.5.1各部分梯形图的设计...................................................................................35
7.6结论......................................................................................................................43
结 论 45
参考文献 45
致 谢 47