设计简介
摘要:由于传统手工焊接对操作人员的技术要求高,并且在操作过程中往往对操作人员的身体产生不可避免的危害。因此,需要自动化控制的焊接过程。为达到自动化的目的,设计旋转电弧传感器。
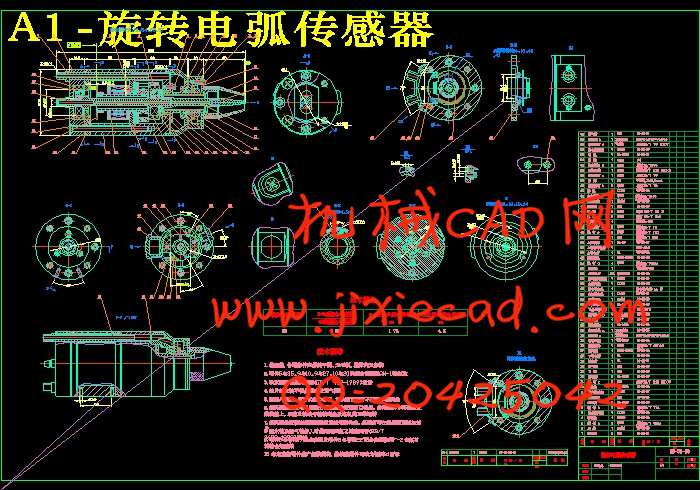
本次设计采用圆柱形外壳体为主要结构,采用空心轴电机为动力源,首先对运动机构和防转机构进行讨论。进而对导电杆,检测装置,偏心机构这些部件进行了计算和设计。最后对通水方式,通电方式,绝缘与密封方式进行阐述。最终达到设计该机构的目的。
关键词: 焊接 旋转电弧 传感器 导电杆 偏心机构
Abstract:Because the traditional manual welding to operating personnel of high technical requirements, and in the operating process often to operating personnel body produce inevitable hazards. Accordingly, need automation control welding process. To achieve the purpose of automation, rotating arc sensor design.
This design USES cylindrical shell as the main structure, outside with hollow shaft motor for power supply, first of sports organizations and prevent discussed. Turn agencies Then the conductive rod, detection device, eccentric institutions of these components are calculated and design. In the end, the post-cooling water way way way, expounds the insulation and seal. Finally achieve the purpose of design agency.
Keywords:welding Rotating arc sensor Conductive stem Eccentric institutions
目 录
1 引言 (01)
1.1 选课的依据和意义 (01)
1.2 当代焊缝跟踪传感器 (01)
1.2.1 附加式传感器概述 (01)
1.2.2 电弧传感器概述 (02)
1.3 电弧传感器工作原理 (03)
1.3.1 电弧传感器的基本原理 (03)
1.3.2旋转电弧传感器的原理 (06)
1.4 课题任务 (10)
2 课题设计主要内容 (11)
2.1电弧旋转方案的选定 (11)
2.1.1 空心轴电机 (11)
2.1.2 运动机构设计 (12)
2.1.3 防转机构 (13)
2.2总体结构设计 (14)
2.2.1 各功能部分的轴向分配 (14)
2.2.2 径向空间的分配 (15)
2.3导电杆部件的设计 (16)
2.3.1 导电杆部件的总体设计 (16)
2.3.2 轴承的选用与安装 (16)
2.4检测装置的选定与安装 (17)
2.4.1 电弧扫描位置与转速的检测方法 (17)
2.4.2 分体式安装的旋转编码器 (18)
2.5偏心机构的设计 (19)
2.5.1 偏心方案的确定 (19)
2.5.2 偏心机构的平衡 (22)
2.6外壳的设计 (23)
2.6.1 外壳总体设计 (23)
2.6.2 通水方式 (24)
2.6.3 通气方式 (25)
2.7绝缘与密封设计 (26)
2.7.1 绝缘设计 (26)
2.7.2 密封设计 (27)
2.8其它零部件的设计 (28)
2.8.1 集线盖与接地装置 (28)
2.8.2 安装设计 (30)
2.8.3 修配方案设计 (30)
2.9设计参数 (31)
3 结论 (32)
3.1课题设计过程总结 (32)
3.2课题设计的缺陷与后续工作 (32)
参考文献 (34)
致 谢 (36)
本次设计采用圆柱形外壳体为主要结构,采用空心轴电机为动力源,首先对运动机构和防转机构进行讨论。进而对导电杆,检测装置,偏心机构这些部件进行了计算和设计。最后对通水方式,通电方式,绝缘与密封方式进行阐述。最终达到设计该机构的目的。
关键词: 焊接 旋转电弧 传感器 导电杆 偏心机构
Abstract:Because the traditional manual welding to operating personnel of high technical requirements, and in the operating process often to operating personnel body produce inevitable hazards. Accordingly, need automation control welding process. To achieve the purpose of automation, rotating arc sensor design.
This design USES cylindrical shell as the main structure, outside with hollow shaft motor for power supply, first of sports organizations and prevent discussed. Turn agencies Then the conductive rod, detection device, eccentric institutions of these components are calculated and design. In the end, the post-cooling water way way way, expounds the insulation and seal. Finally achieve the purpose of design agency.
Keywords:welding Rotating arc sensor Conductive stem Eccentric institutions
目 录
1 引言 (01)
1.1 选课的依据和意义 (01)
1.2 当代焊缝跟踪传感器 (01)
1.2.1 附加式传感器概述 (01)
1.2.2 电弧传感器概述 (02)
1.3 电弧传感器工作原理 (03)
1.3.1 电弧传感器的基本原理 (03)
1.3.2旋转电弧传感器的原理 (06)
1.4 课题任务 (10)
2 课题设计主要内容 (11)
2.1电弧旋转方案的选定 (11)
2.1.1 空心轴电机 (11)
2.1.2 运动机构设计 (12)
2.1.3 防转机构 (13)
2.2总体结构设计 (14)
2.2.1 各功能部分的轴向分配 (14)
2.2.2 径向空间的分配 (15)
2.3导电杆部件的设计 (16)
2.3.1 导电杆部件的总体设计 (16)
2.3.2 轴承的选用与安装 (16)
2.4检测装置的选定与安装 (17)
2.4.1 电弧扫描位置与转速的检测方法 (17)
2.4.2 分体式安装的旋转编码器 (18)
2.5偏心机构的设计 (19)
2.5.1 偏心方案的确定 (19)
2.5.2 偏心机构的平衡 (22)
2.6外壳的设计 (23)
2.6.1 外壳总体设计 (23)
2.6.2 通水方式 (24)
2.6.3 通气方式 (25)
2.7绝缘与密封设计 (26)
2.7.1 绝缘设计 (26)
2.7.2 密封设计 (27)
2.8其它零部件的设计 (28)
2.8.1 集线盖与接地装置 (28)
2.8.2 安装设计 (30)
2.8.3 修配方案设计 (30)
2.9设计参数 (31)
3 结论 (32)
3.1课题设计过程总结 (32)
3.2课题设计的缺陷与后续工作 (32)
参考文献 (34)
致 谢 (36)