设计简介
摘 要
随着工业自动化、微电子技术、传感器技术、控制技术和机械制造工艺水平的快速发展,机械手在工业应用中越来越重要。工业机械手是近代自动控制领域出现的一项新技术,并已经成为现代机械制造生产系统中一个重要组成部分。这种新技术发展很快,并逐渐成为一门新兴的学科——机械手工程。机械手涉及到力学、机械学、电器液压及气压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。本文简要叙述机械手的应用,并重点阐述了在液晶面板生产过程中,用于将液晶面板模组从一段生产线移送到另一条生产线的液晶面板模组移栽机的结构设计。
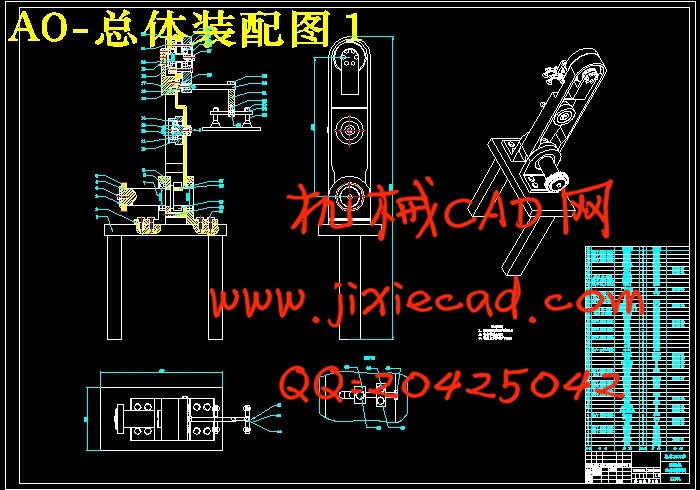
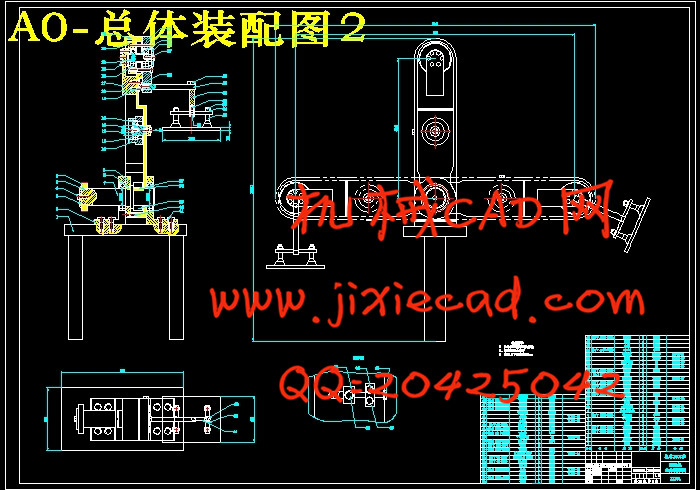
首先,文章介绍了机械手在工业生产过程中的应用,并简要介绍了工业机械手的设计理论和方法。其次,比较全面的讨论了运用移栽机完成面板移送工作的机械手结构设计,确定了该移栽机的传动方式,完成旋转机械手臂和夹紧部件的结构设计,以及各零部件的选用。最后,完成对各零部件的建模工作,并建立移栽机整体装配体,完成各零件工程图以及装配图的绘制工作。
关键词:机械手 、液晶面板模组 、移栽机 、旋转手臂 、夹紧部件
ABSTRACT
With the rapid development of industrial automation, microelectronic technology, sensor technology, control technology and mechanical manufacturing technics,robot plays more and more important roles in industrial applications. The industry manipulator is a new technology which in the modern automatic control domain , and already has became a important component in the modern machine manufacture production system. This new technology has developed rapidly, and becomes an emerging discipline- manipulator project gradually. The manipulator involves to mechanics, mechanics, the electric appliance hydraulic pressure and the barometric pressure technology, the automatic control technology, the sensor technology and the computer technology and so on scientific field, is an interdisciplinary comprehensive technology. This paper describes the application of robot, and focuses on the structure design of LCD panel module transplanting machine, which is used in LCD panel production process to transfer the liquid crystal panel module from one production line to another.
Firstly, the article introduces the applications of robot in the industrial production process, and briefly introduced the industrial robot design theory and methods. Secondly, a more comprehensive discussion of the structural design of transplanting machine using to transfer the LCD panel module is proposed, and then determine the transmission mode of the transplanting machine, complete structural design of the machinery rotating arm and the clamping parts and Select all the standard components. Finally, to complete modeling work of all parts, establish the whole assembly of the transplanting machine, and complete drawing works of engineering drawings and assembly drawings of all machine parts.
Key words : Robot; LCD panel module; Transplanting machine; Rotating arm; Clamping parts
目 录
1 绪论 1
1.1工业机械手简介 1
1.2机械手的组成和分类 1
1.2.1机械手的组成 1
1.2.2机械手的分类 2
1.3工业机械手主要参数 3
1.3.1基本参数 3
1.3.2规格参数 4
1.3.3其他参数 4
2 方案设计 5
2.1设计任务和要求 5
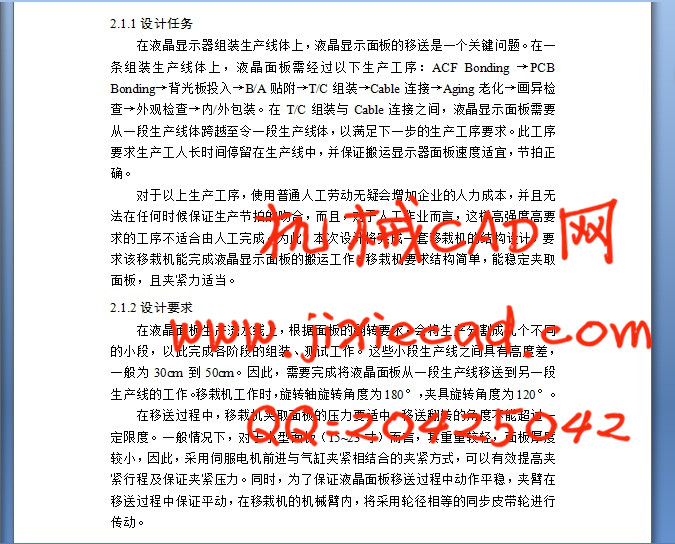
2.1.1设计任务 5
2.1.2设计要求 5
2.2运动方案设计 5
2.3移栽机械手旋转臂的整体运动方案 7
3 机械手设计 8
3.1设计要求 8
3.2手臂机构方案设计 8
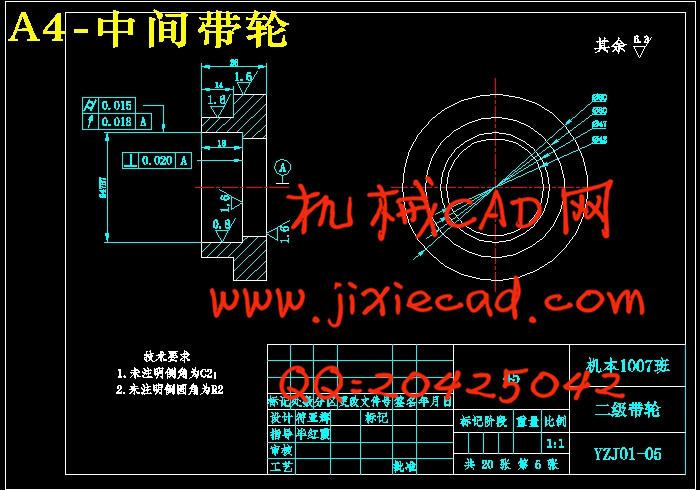
3.3带轮 9
3.3.1一级带轮计算 9
3.3.2二级带轮计算 10
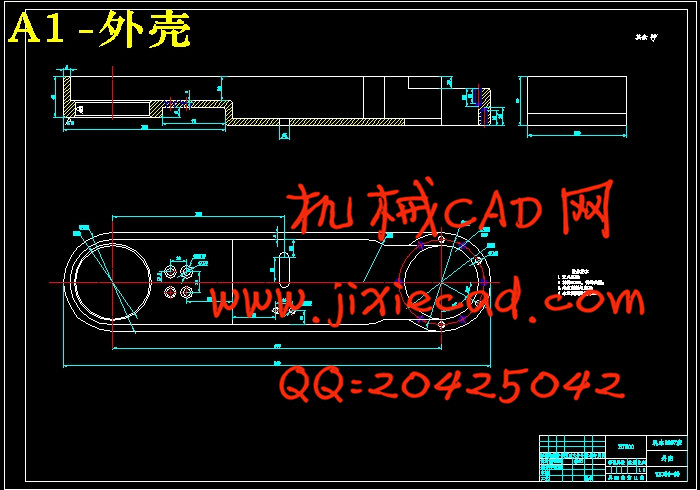
3.4外壳 12
3.4.1外壳的结构设计 12
3.4.2外壳尺寸的确定 12
3.5轴 12
3.5.1主轴的设计 12
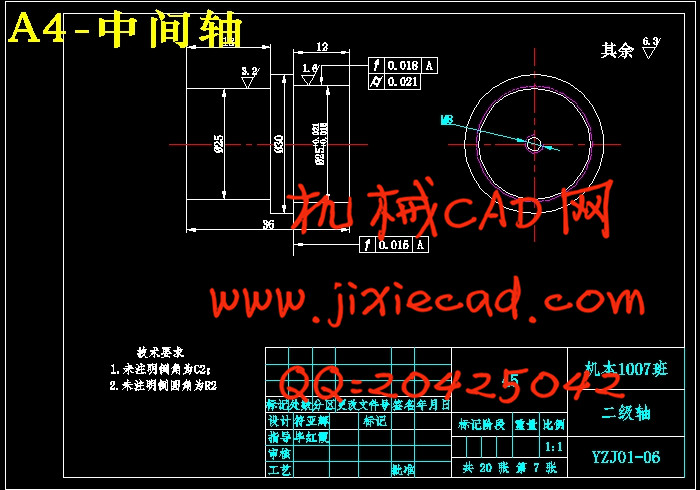
3.5.2第二级轴的设计 13
3.5.3第三级轴的设计 14
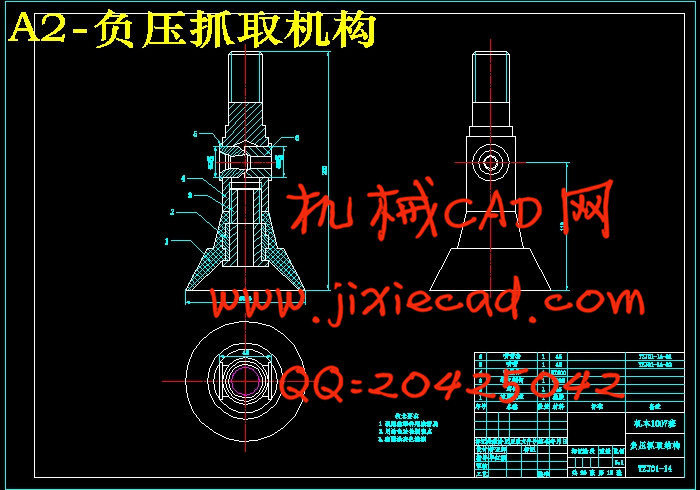
3.6抓取机构 15
3.6.1抓取机构方案设计 15
3.6.2抓取部件的方案设计 15
3.6.3抓取结构设计 16
4 Solidworks建模 20
4.1机械臂外壳建模 20
4.2气流负压抓取机构建模 20
4.3摆动头部建模 21
4.4整体装配体建模 22
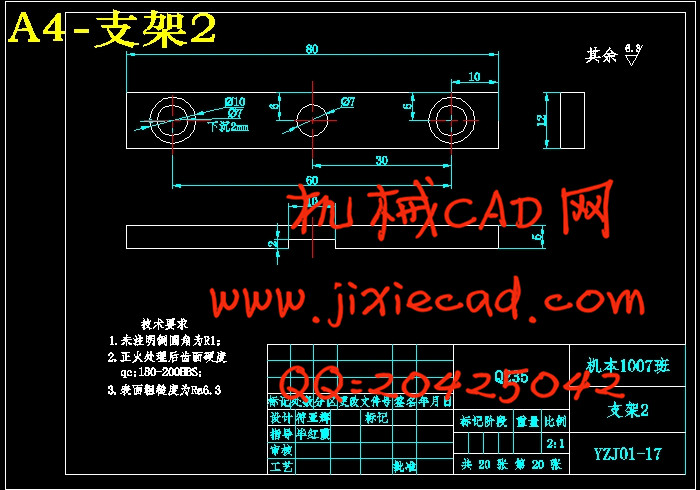
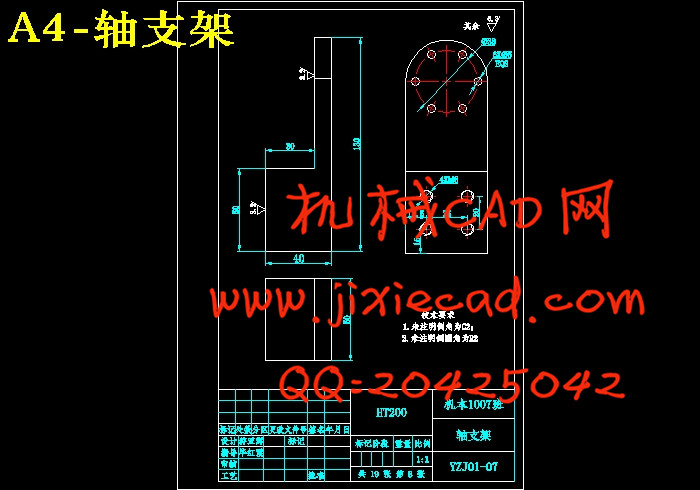
4.5零部件工程图绘制 22
总 结 23
参考文献 24
致 谢 25
随着工业自动化、微电子技术、传感器技术、控制技术和机械制造工艺水平的快速发展,机械手在工业应用中越来越重要。工业机械手是近代自动控制领域出现的一项新技术,并已经成为现代机械制造生产系统中一个重要组成部分。这种新技术发展很快,并逐渐成为一门新兴的学科——机械手工程。机械手涉及到力学、机械学、电器液压及气压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。本文简要叙述机械手的应用,并重点阐述了在液晶面板生产过程中,用于将液晶面板模组从一段生产线移送到另一条生产线的液晶面板模组移栽机的结构设计。
首先,文章介绍了机械手在工业生产过程中的应用,并简要介绍了工业机械手的设计理论和方法。其次,比较全面的讨论了运用移栽机完成面板移送工作的机械手结构设计,确定了该移栽机的传动方式,完成旋转机械手臂和夹紧部件的结构设计,以及各零部件的选用。最后,完成对各零部件的建模工作,并建立移栽机整体装配体,完成各零件工程图以及装配图的绘制工作。
关键词:机械手 、液晶面板模组 、移栽机 、旋转手臂 、夹紧部件
ABSTRACT
With the rapid development of industrial automation, microelectronic technology, sensor technology, control technology and mechanical manufacturing technics,robot plays more and more important roles in industrial applications. The industry manipulator is a new technology which in the modern automatic control domain , and already has became a important component in the modern machine manufacture production system. This new technology has developed rapidly, and becomes an emerging discipline- manipulator project gradually. The manipulator involves to mechanics, mechanics, the electric appliance hydraulic pressure and the barometric pressure technology, the automatic control technology, the sensor technology and the computer technology and so on scientific field, is an interdisciplinary comprehensive technology. This paper describes the application of robot, and focuses on the structure design of LCD panel module transplanting machine, which is used in LCD panel production process to transfer the liquid crystal panel module from one production line to another.
Firstly, the article introduces the applications of robot in the industrial production process, and briefly introduced the industrial robot design theory and methods. Secondly, a more comprehensive discussion of the structural design of transplanting machine using to transfer the LCD panel module is proposed, and then determine the transmission mode of the transplanting machine, complete structural design of the machinery rotating arm and the clamping parts and Select all the standard components. Finally, to complete modeling work of all parts, establish the whole assembly of the transplanting machine, and complete drawing works of engineering drawings and assembly drawings of all machine parts.
Key words : Robot; LCD panel module; Transplanting machine; Rotating arm; Clamping parts
目 录
1 绪论 1
1.1工业机械手简介 1
1.2机械手的组成和分类 1
1.2.1机械手的组成 1
1.2.2机械手的分类 2
1.3工业机械手主要参数 3
1.3.1基本参数 3
1.3.2规格参数 4
1.3.3其他参数 4
2 方案设计 5
2.1设计任务和要求 5
2.1.1设计任务 5
2.1.2设计要求 5
2.2运动方案设计 5
2.3移栽机械手旋转臂的整体运动方案 7
3 机械手设计 8
3.1设计要求 8
3.2手臂机构方案设计 8
3.3带轮 9
3.3.1一级带轮计算 9
3.3.2二级带轮计算 10
3.4外壳 12
3.4.1外壳的结构设计 12
3.4.2外壳尺寸的确定 12
3.5轴 12
3.5.1主轴的设计 12
3.5.2第二级轴的设计 13
3.5.3第三级轴的设计 14
3.6抓取机构 15
3.6.1抓取机构方案设计 15
3.6.2抓取部件的方案设计 15
3.6.3抓取结构设计 16
4 Solidworks建模 20
4.1机械臂外壳建模 20
4.2气流负压抓取机构建模 20
4.3摆动头部建模 21
4.4整体装配体建模 22
4.5零部件工程图绘制 22
总 结 23
参考文献 24
致 谢 25