设计简介
摘 要
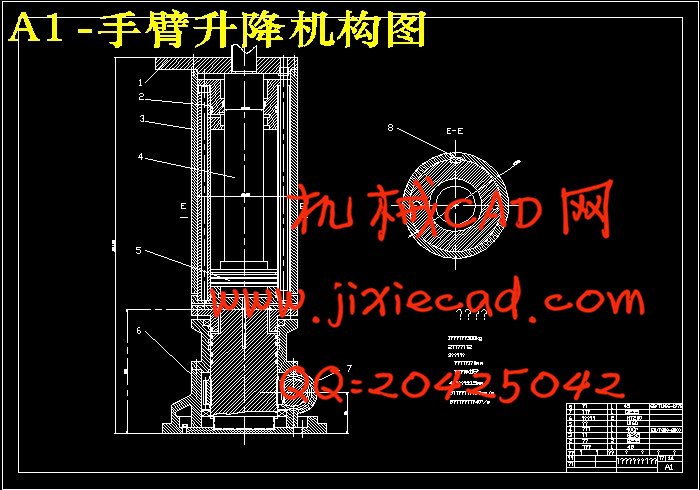
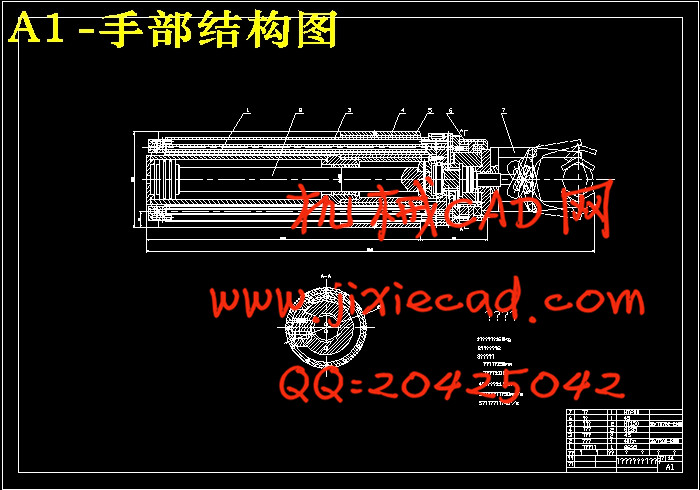
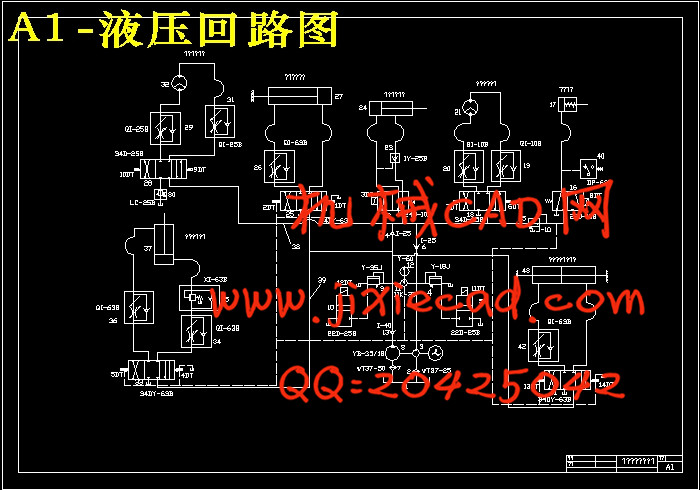
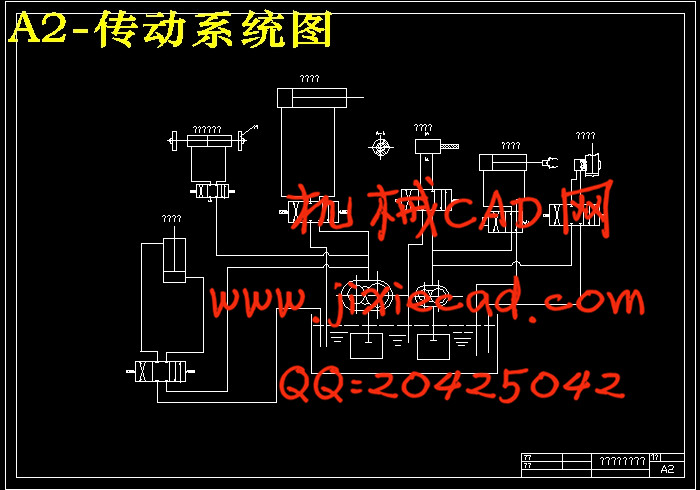
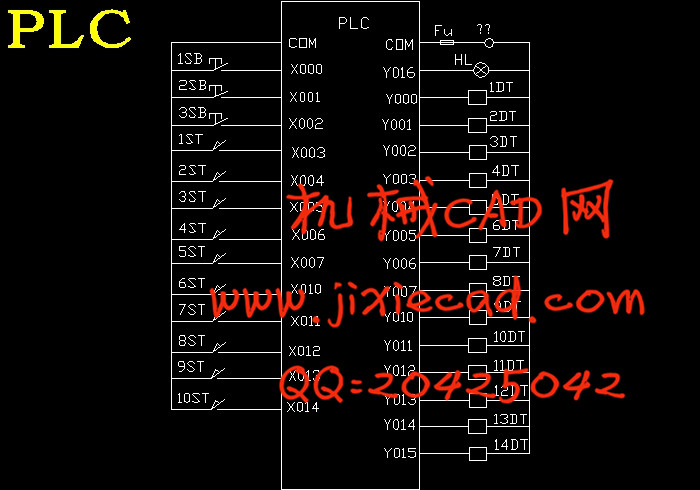
本次设计的液压传动机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要装配图、液压系统图、PLC控制系统原理图。机械手的机械结构采用油缸、螺杆、导向筒等机械器件组成;在液压传动机构中,机械手的手臂伸缩采用伸缩油缸,手腕回转采用回转油缸,立柱的转动采用齿条油缸,机械手的升降采用升降油缸,立柱的横移采用横向移动油缸;在PLC控制回路中,采用的PLC类型为FX2N,当按下连续启动后,PLC按指定的程序,通过控制电磁阀的开关来控制机械手进行相应的动作循环,当按下连续停止按钮后,机械手在完成一个动作循环后停止运动。
本设计拟开发的上料机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,可抓取重量较大的工件。
关键词:机械手 液压 控制回路
本次设计的液压传动机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要装配图、液压系统图、PLC控制系统原理图。机械手的机械结构采用油缸、螺杆、导向筒等机械器件组成;在液压传动机构中,机械手的手臂伸缩采用伸缩油缸,手腕回转采用回转油缸,立柱的转动采用齿条油缸,机械手的升降采用升降油缸,立柱的横移采用横向移动油缸;在PLC控制回路中,采用的PLC类型为FX2N,当按下连续启动后,PLC按指定的程序,通过控制电磁阀的开关来控制机械手进行相应的动作循环,当按下连续停止按钮后,机械手在完成一个动作循环后停止运动。
本设计拟开发的上料机械手可在空间抓放物体,动作灵活多样,可代替人工在高温和危险的作业区进行作业,可抓取重量较大的工件。
关键词:机械手 液压 控制回路
Abstract
The design of hydraulic drive manipulator movements under the provisions of the order , use the basic theory, basic knowledge and related mechanical design expertise comprehensively to complete the design,and drawing the necessary assembly, hydraulic system map, PLC control system diagram . Manipulator mechanical structure using tanks, screw ,guide tubes and other mechanical device component ;In the hydraulic drive bodies ,manipulator arm stretching using telescopic tank ,rotating column of tanks used rack ,manipulator movements using tank movements ,the column takes the horizontal movement of tanks ;The PLC control circuit use the type of FX2N PLC .When pressed for commencement ,PLC in accordance with the prescribed procedures ,through the control of the solenoid valve to control the switch manipulator corresponding moves cycle ,after press the row stop button , the manipulator complete a cycle of action to stop after the hole campaign.
The design of the proposed development of the information on the manipulator can grasp up in space objects ,flexible and varied movements ,can replace the artificial heat and dangerous operation conducted operations,and can grasp the larger workpieces .
Key words: Manipulator ;Hydraulic;Control Loop
目 录The design of hydraulic drive manipulator movements under the provisions of the order , use the basic theory, basic knowledge and related mechanical design expertise comprehensively to complete the design,and drawing the necessary assembly, hydraulic system map, PLC control system diagram . Manipulator mechanical structure using tanks, screw ,guide tubes and other mechanical device component ;In the hydraulic drive bodies ,manipulator arm stretching using telescopic tank ,rotating column of tanks used rack ,manipulator movements using tank movements ,the column takes the horizontal movement of tanks ;The PLC control circuit use the type of FX2N PLC .When pressed for commencement ,PLC in accordance with the prescribed procedures ,through the control of the solenoid valve to control the switch manipulator corresponding moves cycle ,after press the row stop button , the manipulator complete a cycle of action to stop after the hole campaign.
The design of the proposed development of the information on the manipulator can grasp up in space objects ,flexible and varied movements ,can replace the artificial heat and dangerous operation conducted operations,and can grasp the larger workpieces .
Key words: Manipulator ;Hydraulic;Control Loop
摘 要 I
Abstract II
1 前言 1
1.1工业机器人简介 1
1.2世界机器人的发展 1
1.3 我国工业机器人的发展 3
1.4工业机械手的分类 5
1.5工业机械手在生产中的应用 6
1.6工业机械手的选题背景 7
1.7 我要设计的机械手 7
2 手部结构 10
2.1概述 10
2.2 设计时应考虑的几个问题 10
2.3 驱动力的计算 11
3 腕部结构 14
3.1 概述 14
3.2 腕部的结构形式 14
3.3手腕驱动力矩的计算 15
4 臂部结构 18
4.1 概述 18
4.2手臂直线运动机构 18
4.4 手臂的横向移动 21
4.5 臂部运动驱动力计算 22
5 液压系统的设计 25
5.1液压系统简介 25
5.2液压系统的组成 25
5.3机械手液压系统的控制回路 25
5.4 机械手的液压传动系统 27
5.5机械手液压系统的简单计算 30
结 论 37
致 谢 38
参考文献 39