设计简介
摘 要
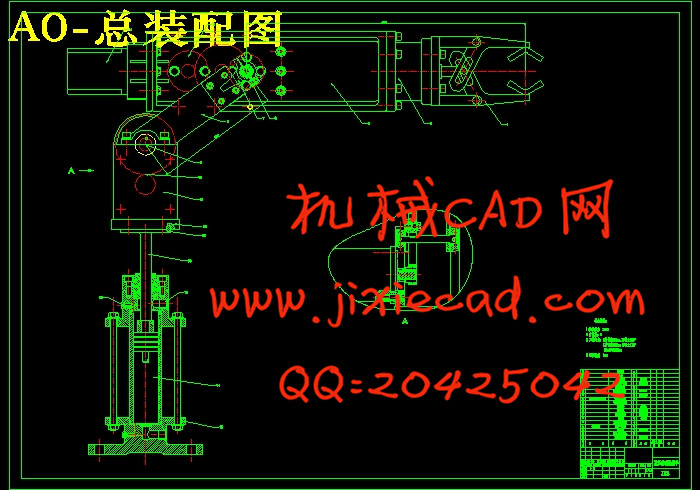
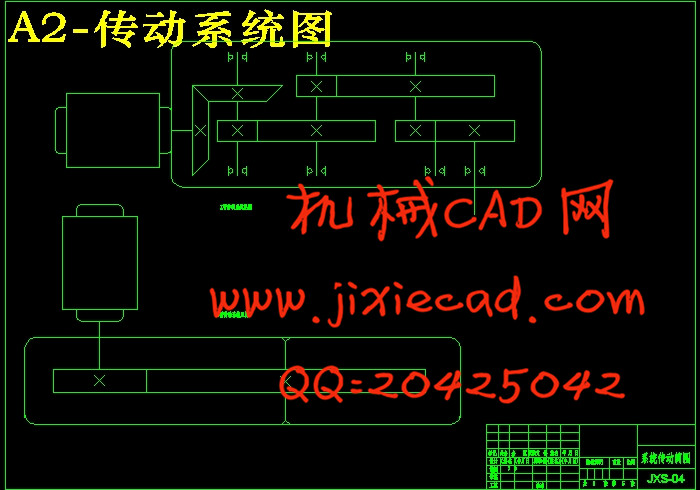
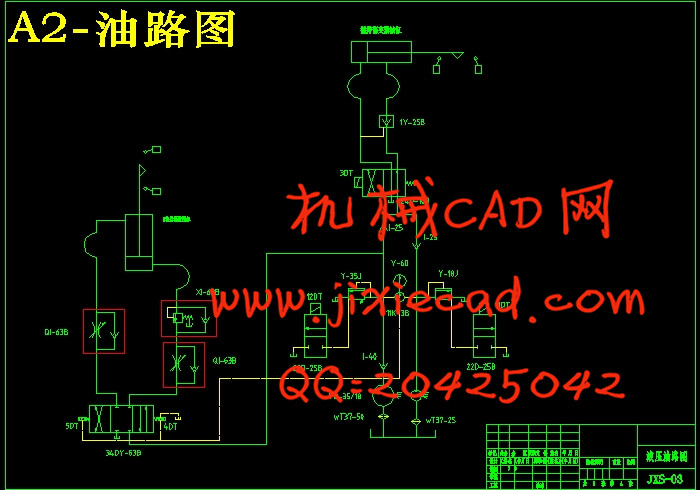
液压机械手是模仿人的关节动作,按照给定的轨迹通过液压系统和电机传动实现抓取和搬运操作的自动装置。本次设计的液压传动机械手根据规定的动作顺序,综合运用所学的理论、知识和相关的机械设计专业知识,完成对机械手的设计,并绘制必要装配图、液压系统图。机械手的机械结构采用油缸和电机传动;在液压传动机构中,机械手的升降采用升降油缸,通过控制电磁阀的开关来控制机械手进行相应的动作循环,当按下连续停止按钮后,机械手在完成一个动作循环后停止运动。
本设计拟开发的机械手可在空间抓放物体,可代替人工在重复的机械动作进行作业,只能抓去质量较小的工件。可以改善劳动条件,减少人力,并便于有节奏的生产。
关键词: 机械手;液压;控制回路
Abstract
Hydraulic robot to imitate human joint action, in accordance with a given track to achieve gripping and handling robot operated by a hydraulic system and motor drives.The design of the hydraulic drive robot action sequence in accordance with the provisions of the integrated use of learning theory, knowledge and related mechanical design expertise to complete the robot design, and draw the necessary assembly drawings, the hydraulic system of FIG. Mechanical structure manipulator oil cylinder and motor drive; hydraulic transmission mechanism, the robot's movements using the lift cylinder, by controlling the solenoid valve switches to control the robot accordingly operation cycle, when continuously pressed the stop button, the robot in the completion of a after the operation cycle to stop movement.
The design of the proposed development of the robot can pick and place objects in space, can instead of doing repetitive mechanical operation of the work, the quality of the workpiece can only be arrested and smaller. It can improve working conditions, reduce manpower, and facilitate rhythmic production.
Keywords: Manipulator ;Hydraulic;Control Loop
目 录
第一章 绪论 1
1.1 机械手的基本概念的研究内容和意义 1
1.1.1 机械手的基本概念 1
1.1.2 机械手的研究意义 1
1.2 机械手的发展现状及应用 1
1.2.1 世界机器人发展状况 2
1.2.2 我国工业机器人的发展 2
1.3 本课题达到的要求 4
第二章 液压机械手主要结构的机械设计 5
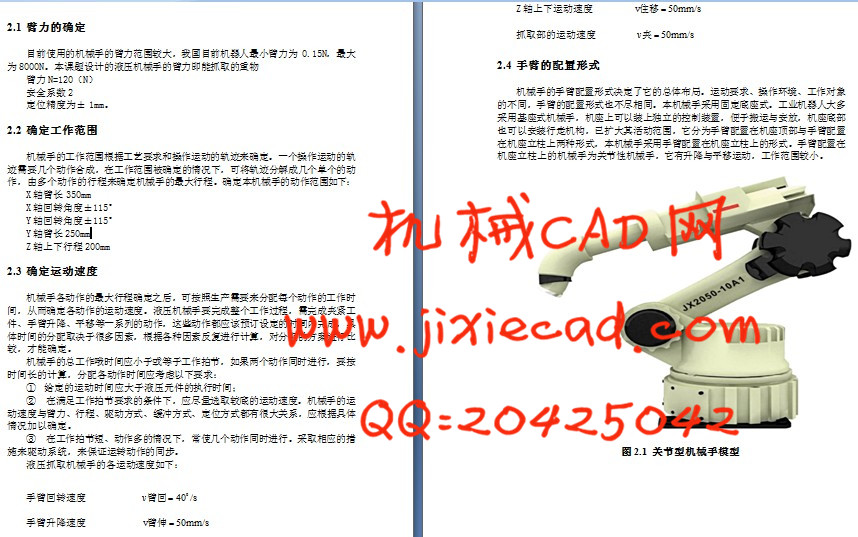
2.1 臂力的确定 5
2.2 确定工作范围 5
2.3 确定运动速度 5
2.4 手臂的配置形式 6
2.5 位置检测装置的选择 7
2.6 驱动与控制方式的选择 7
2.7 本章小结 8
第三章 X轴抓持结构的设计 9
3.1 概述 9
3.3 驱动力的计算 10
3.4 两支点回转式钳爪的定位误差的分析 12
3.5 本章小结 12
第四章 X轴的结构 13
4.1 X轴概述 13
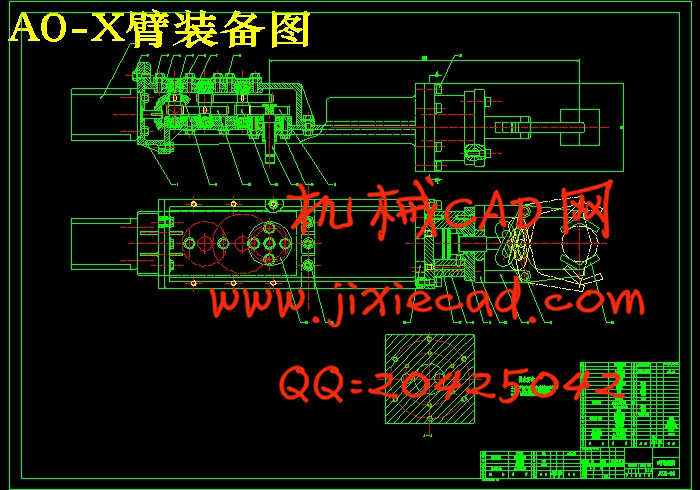
4.2 X臂结构的设计 13
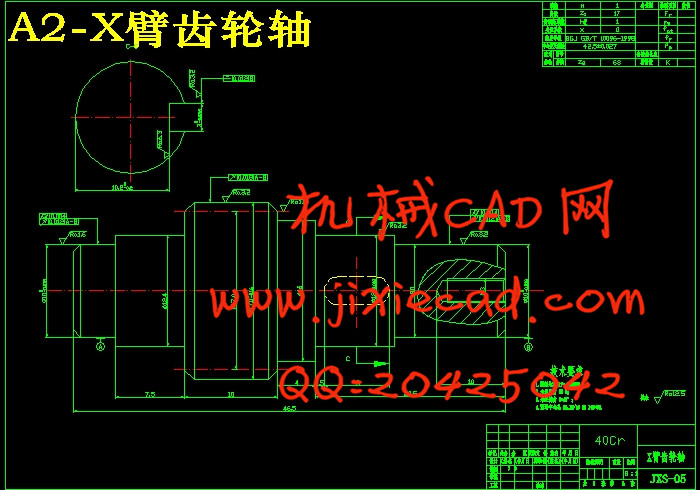
4.3 X转轴的设计计算 14
4.4 轴承的选择 19
4.5 步进电机的选择 20
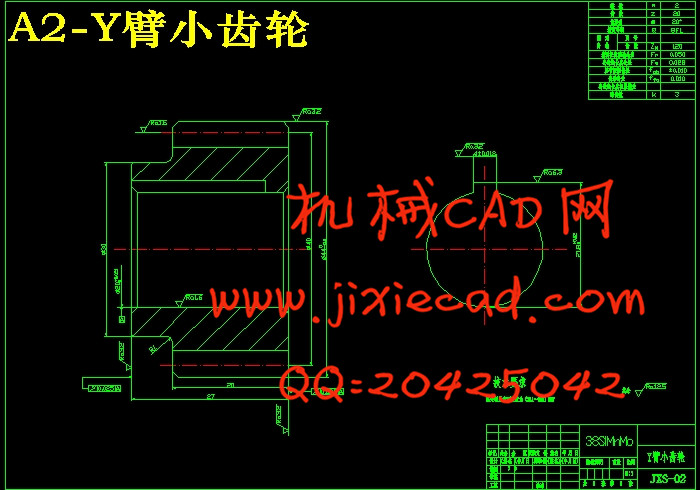
4.6 齿轮的设计 21
第五章 Y臂传动及结构的设计 26
5.1 Y臂概述 26
5.2 X转轴的连接部位设计 26
5.3 Y臂主体机构设计 29
5.4 轴承的选择 32
第六章 液压系统的设计 34
6.1 液压系统简介 34
6.2 液压系统的组成 34
6.3 机械手液压系统的控制回路 34
6.3.1 压力控制回路 34
6.3.2 速度控制回路 35
6.3.3 方向控制回路 35
6.4 机械手的液压传动系统 36
6.5 机械手液压系统的简单计算 36
6.6 双作用单杆活塞油缸 36
6.7 油泵的选择 38
6.8 确定油泵电动机功率N 39
第七章 结 论 40
参考文献 41
致谢 42