设计简介
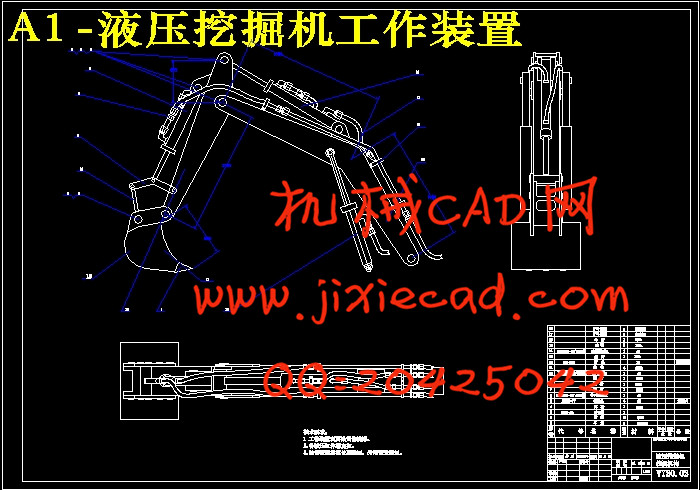
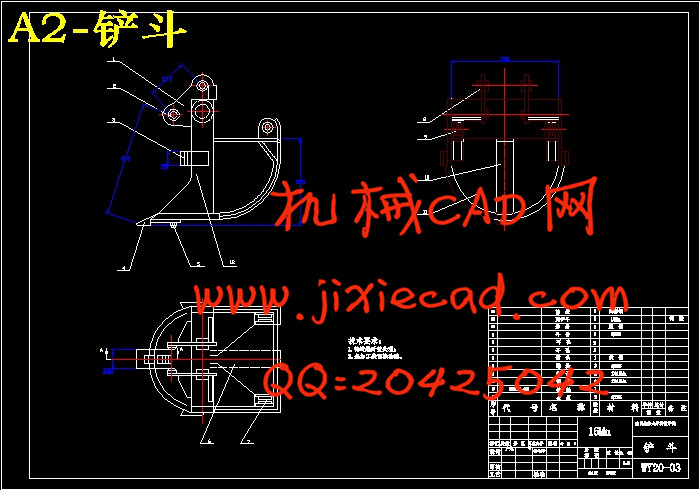
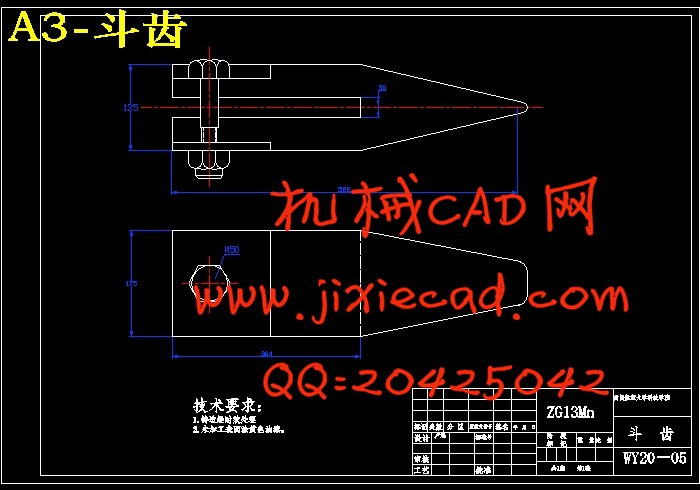
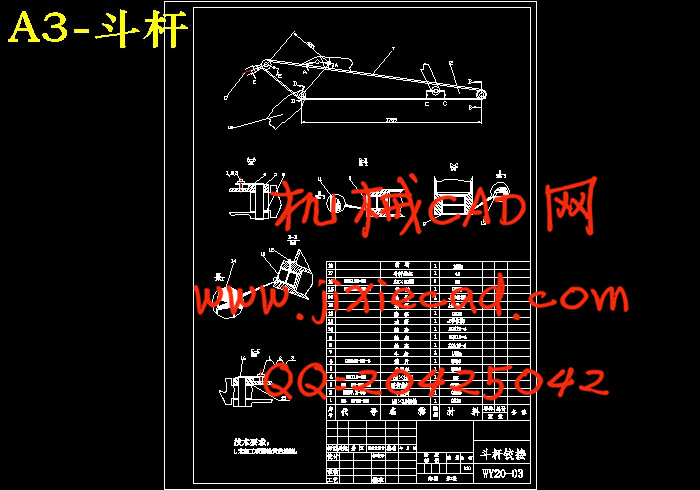
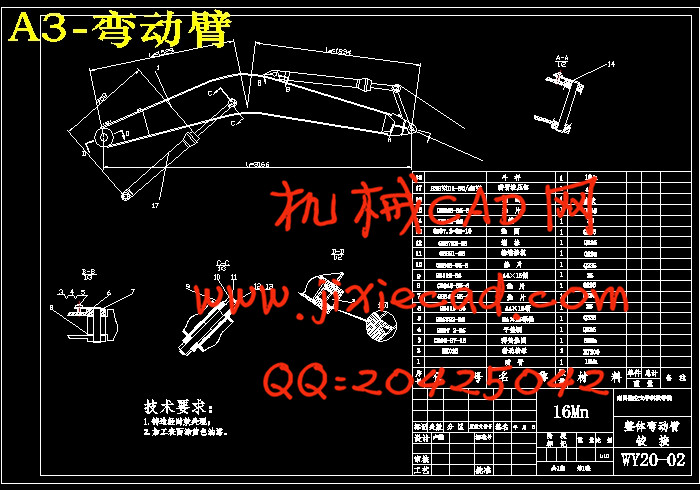
摘 要:本次设计的题目是液压挖掘机反铲装置机构。与其它类型的挖掘机相比,这种类型的挖掘机因有良好通过性能应用最广,对松软地面或沼泽地带还可采用加宽、加长以及浮式履带来降低接地比压。液压挖掘机反铲装置的主要特点为:反铲是中小型液压挖掘机的主要工作装置。液压挖掘机的反铲装置由动臂,斗杆铲斗,以及动臂油缸,斗杆油缸,铲斗油缸和连杆机构组成。其构造特点是各部件之间的连接全部采用铰接,通过油缸的伸缩来实现挖掘工作中的各种动作。动臂的小铰点与回转平台铰接,并以动臂油缸来支撑和改变动臂的倾角,通过动臂油缸的伸缩可使动臂绕小铰点转动而升降。斗杆铰接于动臂的上端,斗杆与动臂的相对位置由斗杆油缸来控制,当斗杆油缸伸缩时,斗杆便可绕动臂上焦铰点转动。铲斗与斗杆前端铰接,并通过铲斗油缸伸缩使铲斗绕该点转动。为增大铲斗的转角,通常以连杆机构与铲斗连接。本次设计的主要参数是斗容量0.2m3,它属于中小型液压挖掘机,主要设计挖掘机的工作装置。
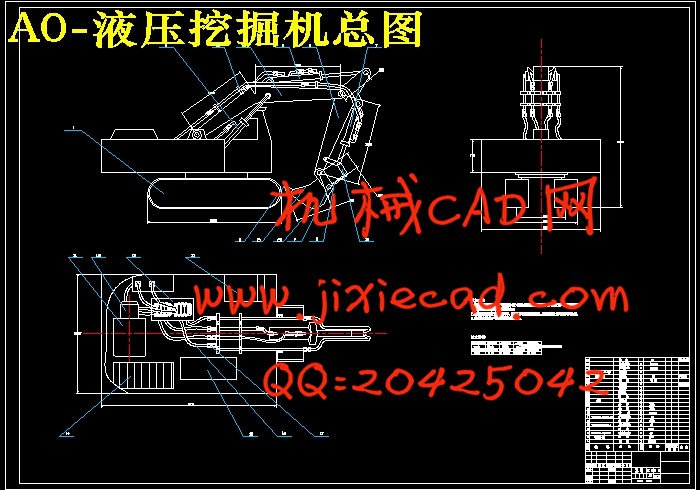
在设计中,采用了轮胎式行走装置,来满足要求。上部转台是全回转式,因此它可在一个更大的范围内工作。又因采用液压传动控制而使整机性能得以改善。与机械式挖掘机相比,其挖掘力提高到2~3倍,整机质量约为5吨,挖掘力约为30kN,最大卸载高度约为2.65m,最大挖掘深度4.2m,最大挖掘半径约为5.728m,从中可以看出整机作业能力有了很大的改进,不仅挖掘力大,且机器重量轻,传动平稳,作业效率高,结构紧凑。另外,还对挖掘机的工作装置提出基于结构推理的机构方案创新设计方法。
关键词:液压挖掘机 ;挖掘机构 ;创新设计
ABSTRACT:This designed topic is the marching hydraulic excavator excavational organization. Compared with other types excavators, this kind of type excavator used very universal that because has good through theperformance, also may use to lengthens widens as well as the floating type caterpillar band to reduce pressure for the soft ground or the bogregion.
The hydraulic excavator main characteristic is: The small and medium-sized hydraulic excavator shovel is the main work device. Hydraulic excavator shovel device by the arm, dou stem bucket, and arm oil cylinder, dou rod oil cylinders, the bucket of cylinder and linkage mechanism. Its structure feature is between components All adopt the connection by oil cylinder hinged adjustable to realize the various movements excavation. Moving arm little hinge point and rotary platform, and with hinged arm oil cylinder to support and change the dip Angle, through arm arm Oil cylinder telescopic can make moving arm around small hinge point lifting rotation. Dou lever arm hinged on the upper arm, dou rod and the relative By dou pole position to control oil cylinder, when dou rod oil cylinder telescopic, dou lever arm can be around the upper energizer hinge point rotation. Bucket and measures Rod front-end loader, and through hinged cylinder telescopic made the bucket turning around the point. To increase the bucket corner, usually by connecting rod Institutions and bucket connection. theperformance good,and may make the high speed reverse, the transmission steady,structure simple, may absorb attacks and vibrates, the operation reduces effort, and to be easy to realize the automated control, is easy to realize the standardization, the seriation, the universalization.This designed main parameter is scoop capacity 0.2m3, it is long to the middle and small scale hydraulic excavator, mainly design the excavator,s the work installment and the hydraulic transmissionprinciple.
In the design, used marching walked the installment to satisfied request. Upside the turnplate is the entire rotation , thereof it may work in a greater scope. And further because uses the hydraulicsteering to enable the entire machine performance to improve. Compared with the mechanical type excavator, its excavation strength enhance to 2 ~ 3 times, the entire machine weight approximately is 5 tons,the excavation strength approximately is 30kN, the biggest unloading high approximately is 2.65m, biggest digging depth is 4.2m, the biggest excavation radius approximately is 5.728m, thus can see the entire machine work ability to have the very big improvement, not only excavation strength big, but also machine weight light, transmission steadyly, work efficiency is high, the structure is compact. Moreover, but also proposes to the excavator work installment based on the structureinference organization plan innovation design method.
Key word:Hydraulic pressure excavator ;Excavation organization ;Hydraulic system ;Innovation design
目 录
1 绪论 1
1.1液压挖掘机的工作特点和基本类型 1
1.1.1液压挖掘机的主要优点 1
1.1.2液压挖掘机的基本类型及主要特点 2
1.2反铲装置的工作原理 2
2 总体设计方案 4
2.1工作装置设计方案原则 4
2.2液压系统设计方案原则(总体) 4
2.2.1对液压系统作业动作要求 4
2.2.2对液压系统基本的要求 5
3挖掘机工作装置设计6
3.1确定动臂的结构形式6
3.2动臂、铲斗机构参数的选择6
3.2.1反铲装置总体方案的选择6
3.2.2铲斗参数的选择 7
3.2.3 动臂机构参数的选择 8
4 液压挖掘机工作装置运动仿真 13
4.1模型建立13
4.2构件运动配装15
4.3构件运动仿真17
结 论21
致 谢22
参考文献23
在设计中,采用了轮胎式行走装置,来满足要求。上部转台是全回转式,因此它可在一个更大的范围内工作。又因采用液压传动控制而使整机性能得以改善。与机械式挖掘机相比,其挖掘力提高到2~3倍,整机质量约为5吨,挖掘力约为30kN,最大卸载高度约为2.65m,最大挖掘深度4.2m,最大挖掘半径约为5.728m,从中可以看出整机作业能力有了很大的改进,不仅挖掘力大,且机器重量轻,传动平稳,作业效率高,结构紧凑。另外,还对挖掘机的工作装置提出基于结构推理的机构方案创新设计方法。
关键词:液压挖掘机 ;挖掘机构 ;创新设计
ABSTRACT:This designed topic is the marching hydraulic excavator excavational organization. Compared with other types excavators, this kind of type excavator used very universal that because has good through theperformance, also may use to lengthens widens as well as the floating type caterpillar band to reduce pressure for the soft ground or the bogregion.
The hydraulic excavator main characteristic is: The small and medium-sized hydraulic excavator shovel is the main work device. Hydraulic excavator shovel device by the arm, dou stem bucket, and arm oil cylinder, dou rod oil cylinders, the bucket of cylinder and linkage mechanism. Its structure feature is between components All adopt the connection by oil cylinder hinged adjustable to realize the various movements excavation. Moving arm little hinge point and rotary platform, and with hinged arm oil cylinder to support and change the dip Angle, through arm arm Oil cylinder telescopic can make moving arm around small hinge point lifting rotation. Dou lever arm hinged on the upper arm, dou rod and the relative By dou pole position to control oil cylinder, when dou rod oil cylinder telescopic, dou lever arm can be around the upper energizer hinge point rotation. Bucket and measures Rod front-end loader, and through hinged cylinder telescopic made the bucket turning around the point. To increase the bucket corner, usually by connecting rod Institutions and bucket connection. theperformance good,and may make the high speed reverse, the transmission steady,structure simple, may absorb attacks and vibrates, the operation reduces effort, and to be easy to realize the automated control, is easy to realize the standardization, the seriation, the universalization.This designed main parameter is scoop capacity 0.2m3, it is long to the middle and small scale hydraulic excavator, mainly design the excavator,s the work installment and the hydraulic transmissionprinciple.
In the design, used marching walked the installment to satisfied request. Upside the turnplate is the entire rotation , thereof it may work in a greater scope. And further because uses the hydraulicsteering to enable the entire machine performance to improve. Compared with the mechanical type excavator, its excavation strength enhance to 2 ~ 3 times, the entire machine weight approximately is 5 tons,the excavation strength approximately is 30kN, the biggest unloading high approximately is 2.65m, biggest digging depth is 4.2m, the biggest excavation radius approximately is 5.728m, thus can see the entire machine work ability to have the very big improvement, not only excavation strength big, but also machine weight light, transmission steadyly, work efficiency is high, the structure is compact. Moreover, but also proposes to the excavator work installment based on the structureinference organization plan innovation design method.
Key word:Hydraulic pressure excavator ;Excavation organization ;Hydraulic system ;Innovation design
目 录
1 绪论 1
1.1液压挖掘机的工作特点和基本类型 1
1.1.1液压挖掘机的主要优点 1
1.1.2液压挖掘机的基本类型及主要特点 2
1.2反铲装置的工作原理 2
2 总体设计方案 4
2.1工作装置设计方案原则 4
2.2液压系统设计方案原则(总体) 4
2.2.1对液压系统作业动作要求 4
2.2.2对液压系统基本的要求 5
3挖掘机工作装置设计6
3.1确定动臂的结构形式6
3.2动臂、铲斗机构参数的选择6
3.2.1反铲装置总体方案的选择6
3.2.2铲斗参数的选择 7
3.2.3 动臂机构参数的选择 8
4 液压挖掘机工作装置运动仿真 13
4.1模型建立13
4.2构件运动配装15
4.3构件运动仿真17
结 论21
致 谢22
参考文献23