设计简介
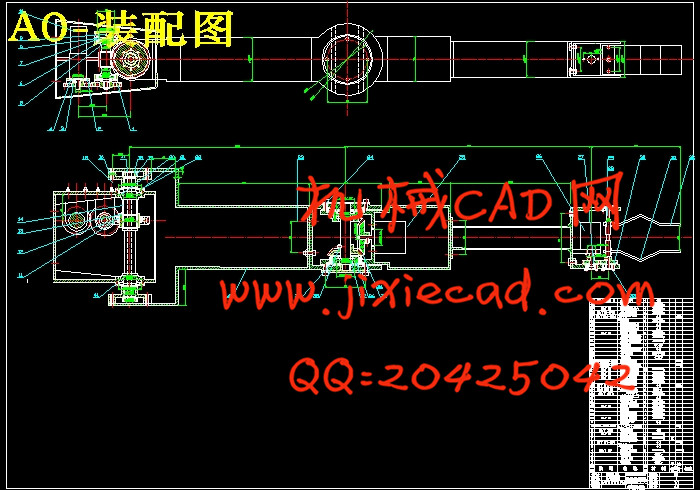
本课题来源于南京市科技局的科技计划项目,具有较大的应用价值。结合当前小型移动机器人的发展,而进行移动机器人机械臂的结构设计和计算,要求结构紧凑、轻巧,以提高机器人臂杆系统的运动性能。将移动机械臂安装在是一个小型多用途移动作业机器人智能移动平台,可以用于执行爆炸物处理、侦察、通讯、探测系统或其他特殊任务。通过几个阶段系统的分析、设计与计算等过程,提高分析与解决工程实际问题的能力。具备较扎实的机械设计及自动化方面的专业知识,能较熟练的使用CAD软件或其他工程设计与分析软件进行设计。本课题以小型地面移动机器人的机械折叠臂为研究对象,设计了移动机器人机械臂的设计。
论文以实际工程为背景,结合移动机器人机械臂研究设计过程中遇见的问题,进行分析。内容安排如下:
在了解总体尺寸、重量及运动指标的基础上,进行机构分析和比较;对选定的方案进行机构造型、分析、设计与计算;绘制该系统装配图及部分零件图;编写设计、计算说明书。
设计机械臂及夹持机构。设计数据要求:机械臂折叠时总长≤650mm,单臂杆转动范围:150°,旋动速度0.5rad/s,系统自重≤7kg。机器人底盘系统的总体尺寸不超出:长×宽×高=800mm×540mm×260mm。机械臂的抓取重量为3kg,抓取对象为直径40mm、长度360mm的圆柱体。
目 录
1 引言………………………………………………………………………………… 1
1.1 移动机器人机械臂的研究意义及目的………………………………………… 1
1.2 移动机器人的发展现状及研究………………………………………………… 2
1.3 本课题的来源和研究内容…………………………………………………… 5
2 移动机器人机械臂的总体设计…………………………………………………… 7
2.1 机械臂结构的确定 …………………………………………………………… 7
2.2 机械臂设计的主要参数………………………………………………………… 7
3 移动机器人机械臂的手部结构设计……………………………………………… 8
3.1 手部结构设计要求……………………………………………………………… 9
3.2 传动方式的选择………………………………………………………………… 9
3.3 手部结构的设计…………………………………………………………… 9
3.4 电机的计算与型号选择………………………………………………………… 12
3.5 材料的选择与强度校核………………………………………………………… 14
3.6 本章小结…………………………………………………………………… 17
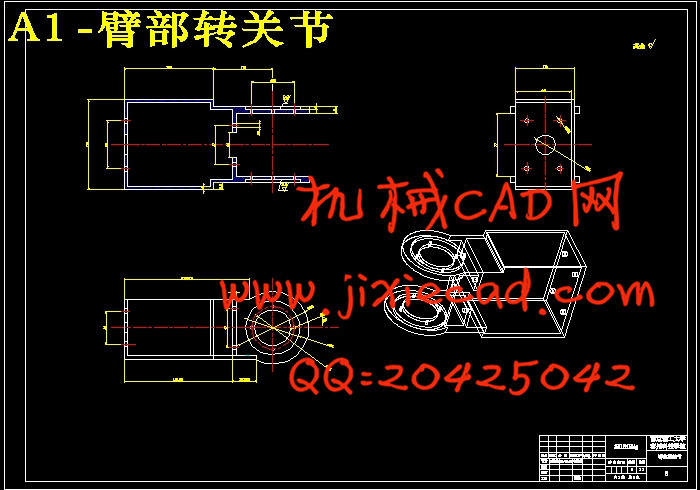
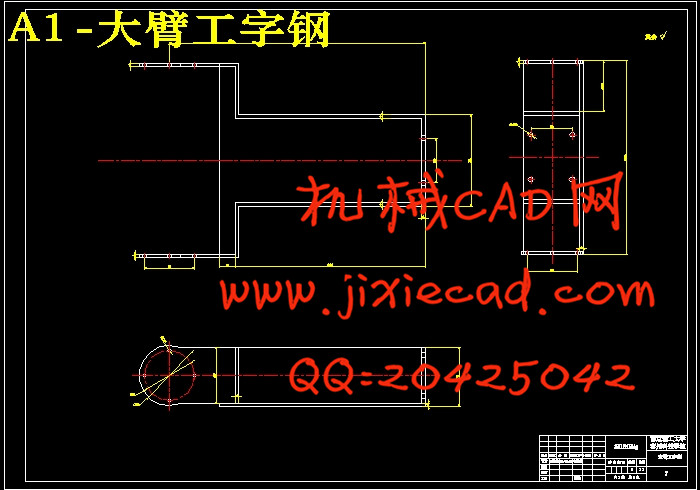
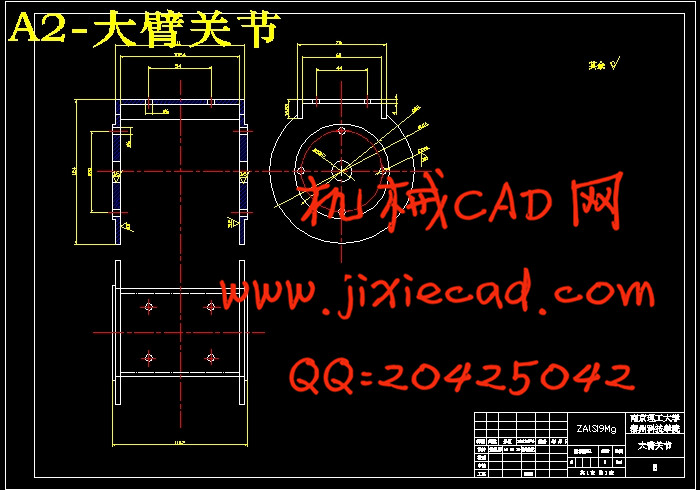
4 移动机器人机械臂的臂部结构设计………………………………………18
4.1 臂部结构设计要求…………………………………………………………… 18
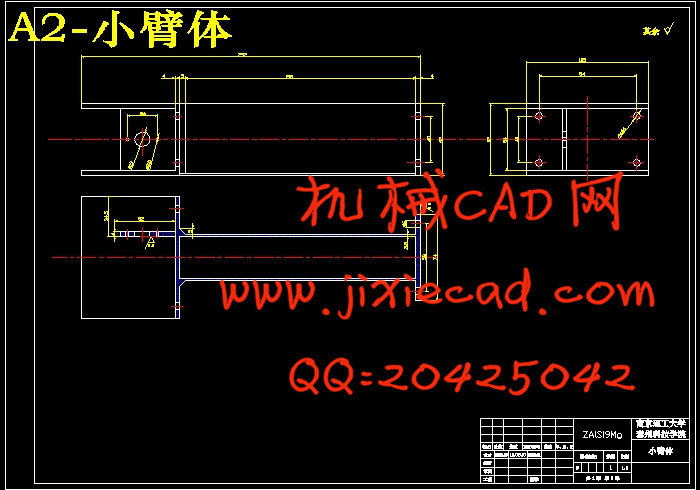
4.2 臂部结构的设计………………………………………………………………… 19
4.3 臂部电机的选择………………………………………………………………… 26
5 移动机器人机械臂的肩部结构设计…………………………………………………… 28
5.1 肩部的传动方式………………………………………………………………… 28
5.2 肩部结构的设计………………………………………………………………… 29
5.3 肩部电机的选择………………………………………………………………… 31
5.4 肩部直流电机的计算……………………………………………………………32
5.5 肩部伺服电机与臂部和手部步进电机的控制………………………………… 33
6 移动机器人机械臂的结构分析………………………………………………………… 30
6.1 机械臂总体结构分析…………………………………………………37
6.2 机械臂的肩部结构分析………………………………………………………… 39
6.2 本章小结………………………………………………………………………… 39
结束语 ……………………………………………………………………………… 42
致谢 ………………………………………………………………………………… 45
参考文献…………………………………………………………………………… 46
论文以实际工程为背景,结合移动机器人机械臂研究设计过程中遇见的问题,进行分析。内容安排如下:
在了解总体尺寸、重量及运动指标的基础上,进行机构分析和比较;对选定的方案进行机构造型、分析、设计与计算;绘制该系统装配图及部分零件图;编写设计、计算说明书。
设计机械臂及夹持机构。设计数据要求:机械臂折叠时总长≤650mm,单臂杆转动范围:150°,旋动速度0.5rad/s,系统自重≤7kg。机器人底盘系统的总体尺寸不超出:长×宽×高=800mm×540mm×260mm。机械臂的抓取重量为3kg,抓取对象为直径40mm、长度360mm的圆柱体。
目 录
1 引言………………………………………………………………………………… 1
1.1 移动机器人机械臂的研究意义及目的………………………………………… 1
1.2 移动机器人的发展现状及研究………………………………………………… 2
1.3 本课题的来源和研究内容…………………………………………………… 5
2 移动机器人机械臂的总体设计…………………………………………………… 7
2.1 机械臂结构的确定 …………………………………………………………… 7
2.2 机械臂设计的主要参数………………………………………………………… 7
3 移动机器人机械臂的手部结构设计……………………………………………… 8
3.1 手部结构设计要求……………………………………………………………… 9
3.2 传动方式的选择………………………………………………………………… 9
3.3 手部结构的设计…………………………………………………………… 9
3.4 电机的计算与型号选择………………………………………………………… 12
3.5 材料的选择与强度校核………………………………………………………… 14
3.6 本章小结…………………………………………………………………… 17
4 移动机器人机械臂的臂部结构设计………………………………………18
4.1 臂部结构设计要求…………………………………………………………… 18
4.2 臂部结构的设计………………………………………………………………… 19
4.3 臂部电机的选择………………………………………………………………… 26
5 移动机器人机械臂的肩部结构设计…………………………………………………… 28
5.1 肩部的传动方式………………………………………………………………… 28
5.2 肩部结构的设计………………………………………………………………… 29
5.3 肩部电机的选择………………………………………………………………… 31
5.4 肩部直流电机的计算……………………………………………………………32
5.5 肩部伺服电机与臂部和手部步进电机的控制………………………………… 33
6 移动机器人机械臂的结构分析………………………………………………………… 30
6.1 机械臂总体结构分析…………………………………………………37
6.2 机械臂的肩部结构分析………………………………………………………… 39
6.2 本章小结………………………………………………………………………… 39
结束语 ……………………………………………………………………………… 42
致谢 ………………………………………………………………………………… 45
参考文献…………………………………………………………………………… 46