您好,欢迎来到机械CAD网!
客服QQ:20425042
搜索
网站首页
工艺夹具
数控编程
注塑模具
冲压模具
机械机电
土木工程
采矿通风
其他专业
首页
>
机械机电
>
设计名称
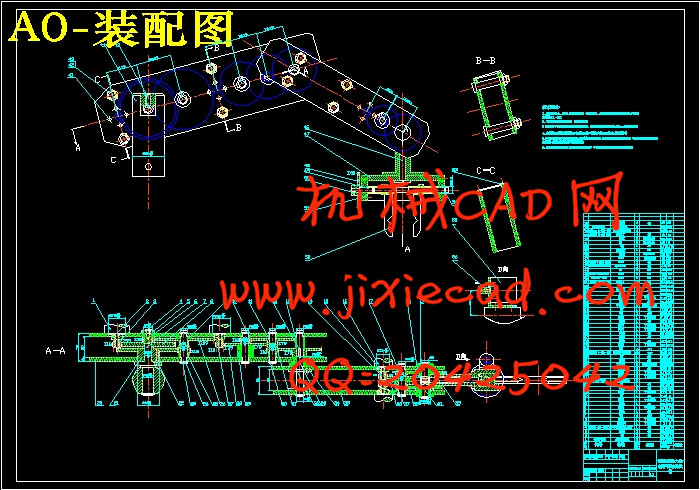
移动机器人机械臂结构设计【5自由度步进电机驱动】【说明书+CAD】
设计编号
JX5303
设计软件
AutoCAD,Word
包含内容
见右侧图片
说明字数
见下方截图
图纸数量
见右侧图片
推荐指数
较高
价格
价格优惠中
整理日期
2017-07-29
整理人
admin
购买流程
查看如何购买本站设计
设计简介
全旋转关节小型机器人具有典型的工业机器人的运动特征。唯有体型较小,可以放在桌面上,适宜于教学实验和作为自动化及控制技术的研究工具。
该课题在调研的基础上完成5自由度步进电机驱动,传动设计和结构设计。重点工作是电动机的选择和校核及其关键零部件的强度计算。
部分图纸截图
说明
机械毕业设计|论文
展开
收缩
在线咨询
QQ:20425042
QQ:99872184
技术支持
售后服务