设计简介
摘 要
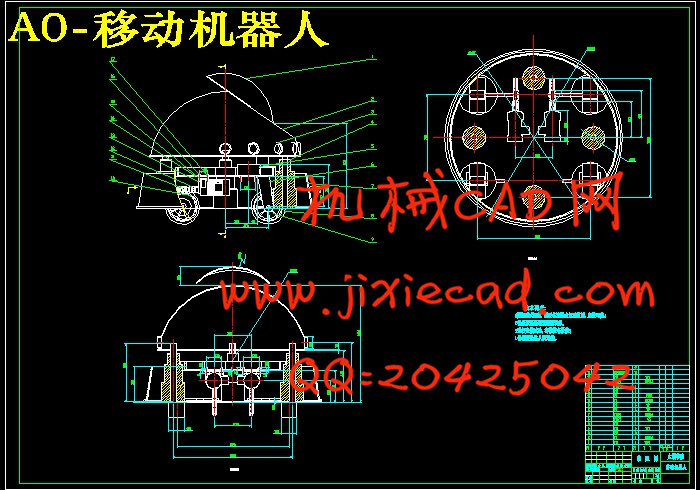
移动机器人是一种由传感器、自主控制的移动载体组成的机器人系统。移动机器人具有移动功能,在代替人从事危险、恶劣(如辐射、有毒等)环境下作业和人所不及的(如宇宙空间、水下)作业环境方面,比一般机器人有更大的机动性,灵活性。随着机器人技术在外星探索、野外考察、军事、安全等全新的领域得到 日益广泛的采用,机器人技术由室内走向室外,由固定、人工的环境走向移动、非人工的环境。本课题是机器人设计的基本环节,能够为后续关于机器人的研究 提供有价值的平台参考和有用的思路。本文对各种移动机器人进行了比较,从而确定了四轮式机器人总体结构与参数的研究设计。对四轮式移动机器人的运动学进行了探讨,建立了运动学模型。在建立运动学模型的基础上对机器人的基本运动方式进行了分析,并推到计算出其动力学模型。本文了解了基于多传感器的移动机器人的自主控制问题。分析了直流伺服电机的动态特性,为后续的研究提供可靠的参考和依据。关键词:轮式移动机器人;运动学与动力学;自主控制问题
Abstract
Mobile robot is a kind of controlled by sensors, autonomous robot system composed of mobile carrier .Mobile robot has the mobile function, instead of people engaged in dangerous and bad environment (such as radiation, toxic) homework and have less (such as space and underwater) in the working environment, have greater flexibility than ordinary robot, flexibility As robots technology in alien exploration, field investigation, military, security and other new fields are widely used, the robot technology by indoor to outdoor, from fixed, artificial environment to move, not artificial environments. This topic is a basic link of robot design, be able to follow-up on the robot platform for the study provide a valuable reference and useful ideas. In this paper, all kinds of mobile robots were compared to determine the four wheel robot structure and parameters of the study design as a whole. Of four wheeled mobile robot kinematics are discussed in this paper, the kinematics model is established. In kinematics model is established on the basis of the basic movement of robot is analyzed, and its dynamic model to calculate. In this paper, the control problem for mobile robot based on multi-sensor. After the completion of the design analysis of the dynamic characteristics and the feasibility of omnidirectional mobile mechanism, provide reliable reference and basis for follow-up studies .
Key words: wheeled mobile robots; Kinematics and dynamics; Autonomous control
目 录
摘 要 III
Abstract IV
目 录 V
1 绪论 1
1.1 本课题的研究内容和意义 1
1.2 国内外的发展概况 1
1.2.1 国内外发展概况 1
1.2.2 移动机器人的主要组成 2
1.3 本课题应达到的要求 2
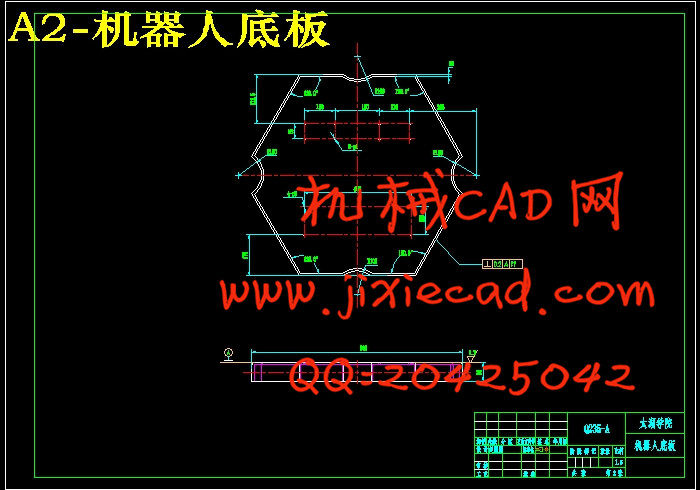
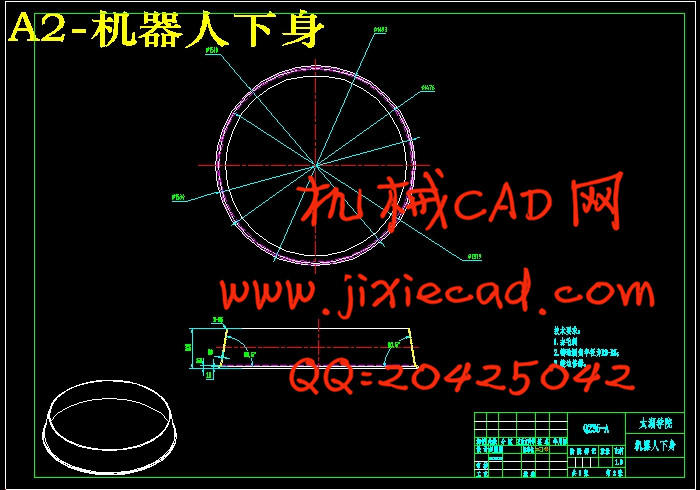
2 移动机器人行走机构的总体结构和参数 3
2.1 机器人运动方式的选择 3
2.2 轮式机器人移动能力分析 5
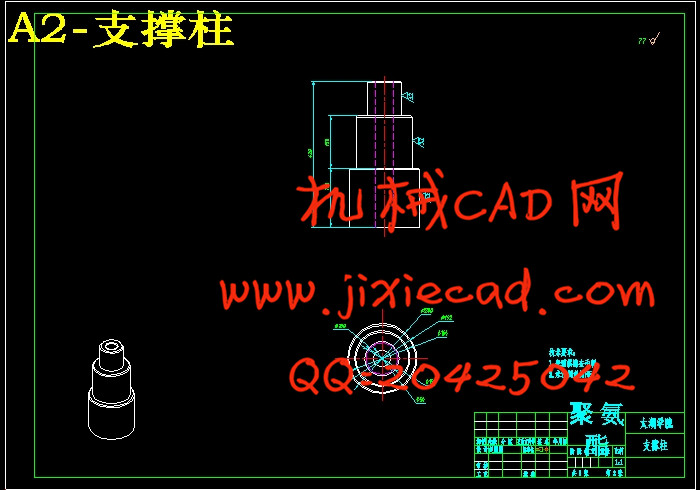
2.3 轮式机器人驱动轮的组成 6
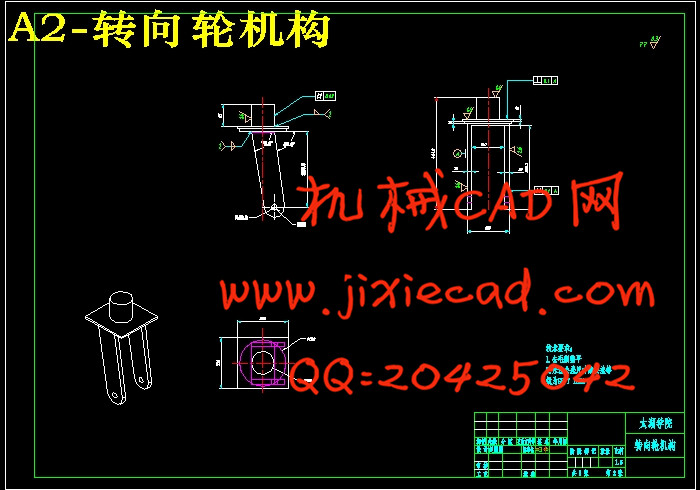
2.4 轮式机器人转向轮的组成 7
2.5 电机的选择 8
2.6 直流伺服电机的数学模型及动态参数的确定 9
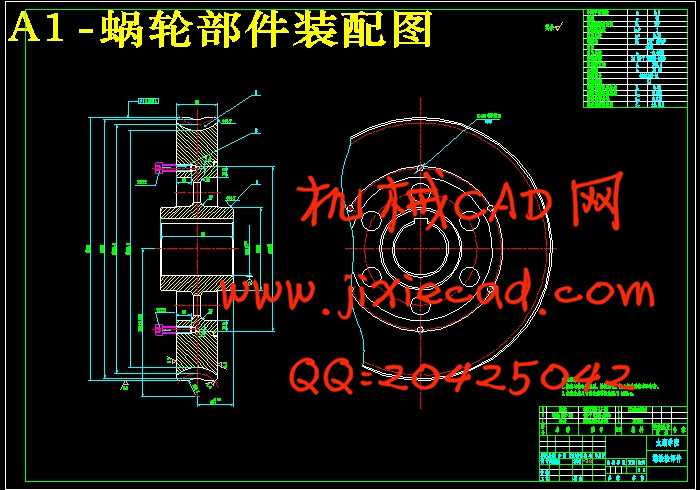
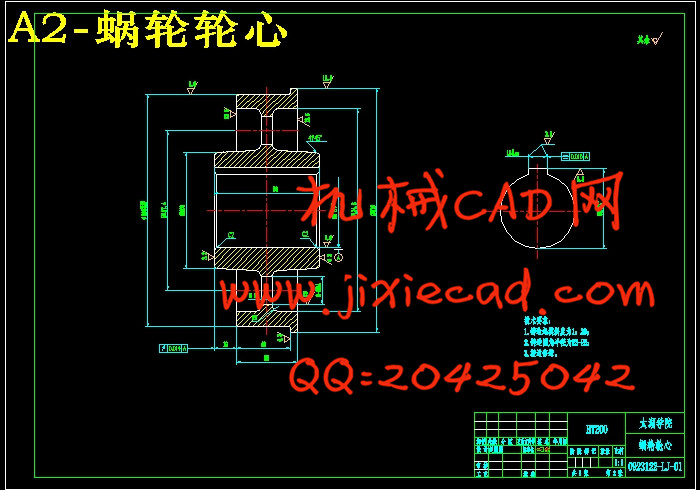
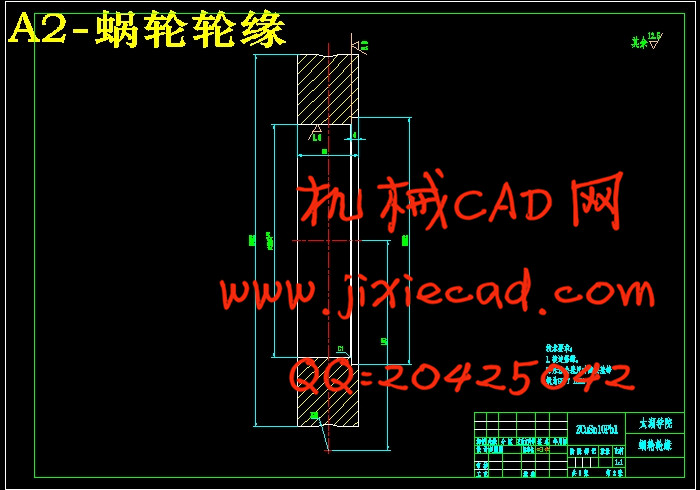
2.7 减速机构的设计(蜗轮蜗杆减速机构) 12
2.7.1 电机参数的确定 12
2.7.2 计算传动装置的运动和动力参数 13
2.7.3 蜗轮蜗杆设计计算 14
2.7.4 蜗轮轴的设计 16
2.7.5 初选滚动轴承 16
2.7.6 蜗杆轴的结构设计 18
2.8 机器人的电源供应 19
2.9 车轮及轮毂 19
3 移动机器人的运动学模型 21
3.1 机器人的运动学分析 21
3.2 两种运动规划方法分析 23
3.3 仿真实验 23
3.4 结论 24
4 机器人四轮转向系统的动力学模型 25
4.1轮子 25
4.2 平台体 25
4.3 小结 26
5 自主运动控制 26
5.1 控制系统的选用 26
5.2可行性分析 28
6 结论与展望 28
6.1 结论 28
6.2 不足之处及未来展望 29
致 谢 29
参考文献 30