设计简介
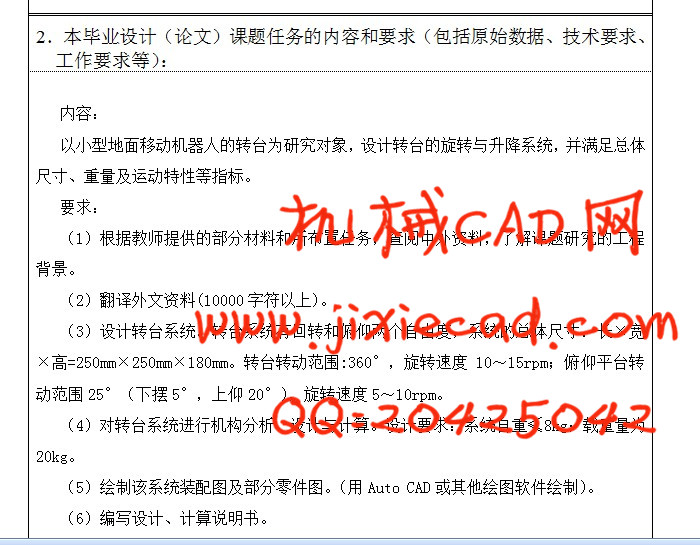
本课题以小型地面移动机器人的转台为研究对象,综合运用所学基础理论知识,根据给定的总体结构尺寸、重量及运动特性指标,进行结构选型、机构设计。通过本课题的研究,通过对设计要求、工作原理和机构动作的分析和理解,构思机构运动方式和传动布局,并进行机构、零部件设计计算等环节的实践,培养设计、计算、制图及计算机应用能力,以提高分析与解决工程实际问题的能力。
目 录
1 引言…………………………………………………………………………………… 1
1.1本课题研究内容及意义……………………………………………………………… 1
1.2 国内外发展现状…………………………………………………………………… 1
1.3 本文所做的工作…………………………………………………………………… 1
2 装台系统的总体设计 ………………………………………………………………… 3
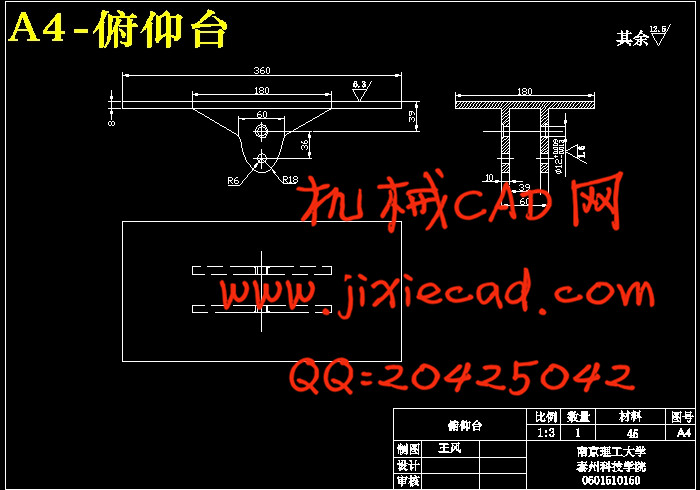
3 俯仰系统的设计……………………………………………………………………… 5
3.1 俯仰机构的设计……………………………………………………………………… 5
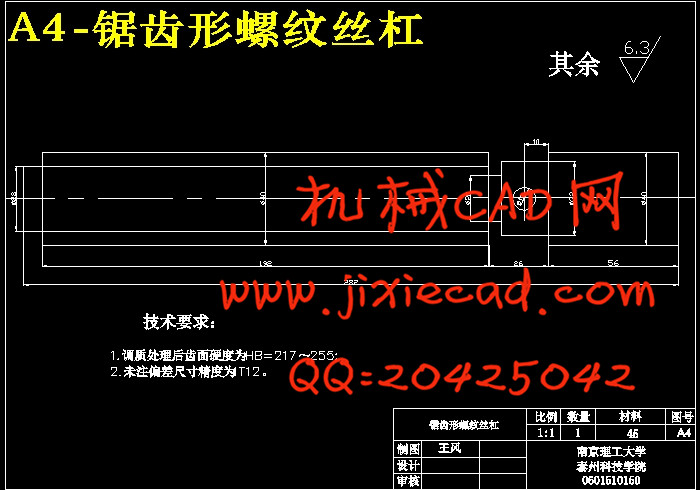
3.2 俯仰系统的传动分析与计算……………………………………………………… 8
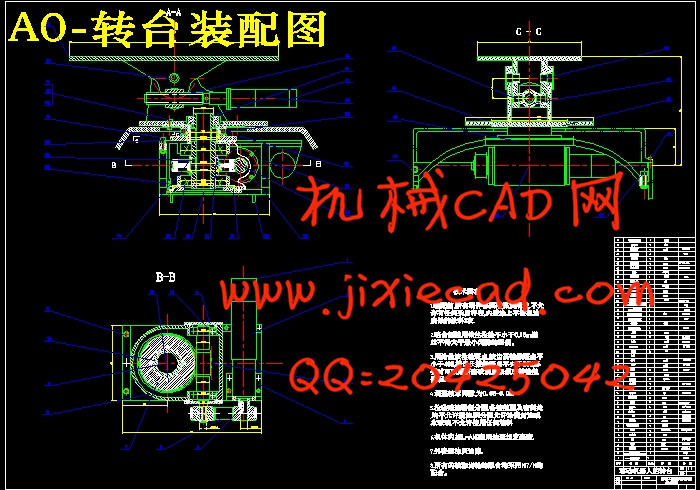
4 转台回转系统的设计………………………………………………………………… 13
4.1 转台回转机构的设计……………………………………………………………… 13
4.2 传动比的设置……………………………………………………………………… 16
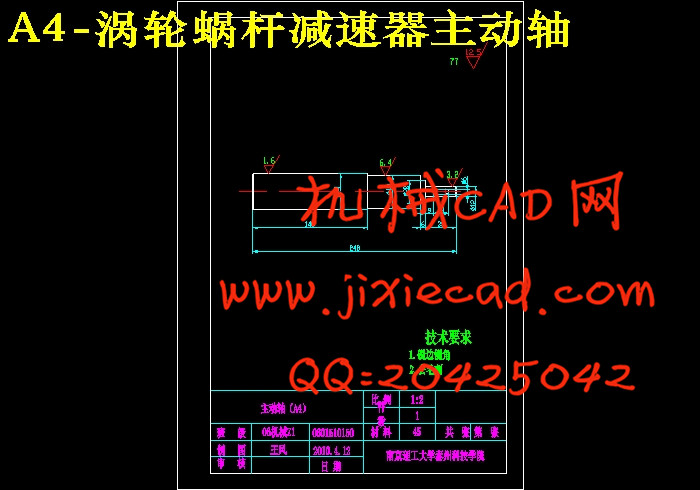
4.3 回转系统的动力分析与计算……………………………………………………… 16
结束语 …………………………………………………………………………………… 31
致谢 ……………………………………………………………………………………… 32
参考文献………………………………………………………………………………33
目 录
1 引言…………………………………………………………………………………… 1
1.1本课题研究内容及意义……………………………………………………………… 1
1.2 国内外发展现状…………………………………………………………………… 1
1.3 本文所做的工作…………………………………………………………………… 1
2 装台系统的总体设计 ………………………………………………………………… 3
3 俯仰系统的设计……………………………………………………………………… 5
3.1 俯仰机构的设计……………………………………………………………………… 5
3.2 俯仰系统的传动分析与计算……………………………………………………… 8
4 转台回转系统的设计………………………………………………………………… 13
4.1 转台回转机构的设计……………………………………………………………… 13
4.2 传动比的设置……………………………………………………………………… 16
4.3 回转系统的动力分析与计算……………………………………………………… 16
结束语 …………………………………………………………………………………… 31
致谢 ……………………………………………………………………………………… 32
参考文献………………………………………………………………………………33