设计简介
随着现代科学技术的发展,管道运输作为一种高效、安全、可靠的手段应用日益广泛,城市中的地下排水系统、取暖系统、煤气系统、自来水系统等都应用了各种管道;另外,在现代工农业、石油、化学、核工业等领域也大量使用了管道。经过长期使用,它们会出现裂纹、腐蚀、堵塞等故障。有的管道中输送的是剧毒或放射性介质,若这些管道产生裂纹、漏孔会造成介质泄漏,引起事故甚至发生灾难。为了防患于未然,必须对这些管道进行定期检测和维修。但是它们有的埋在地下,甚至埋在海底,有的口径很小,人无法进入。挖出管道进行检测、维修既不经济又不现实,由此可见,管道机器人有着广阔的市场。
我国早在1987年就开展了管内机器人的研究,并试制了几种模型,但总体水平较国外差。管内机器人研究是机电一体化的高科技研究项目。在石油、化工、核工业、给排水等许多管道工程中,都需要进行管内检测、喷涂及加工等工作,管内机器人在完成这些工作中会发挥重要作用,因此,开发研究管内机器人意义很大[1]。
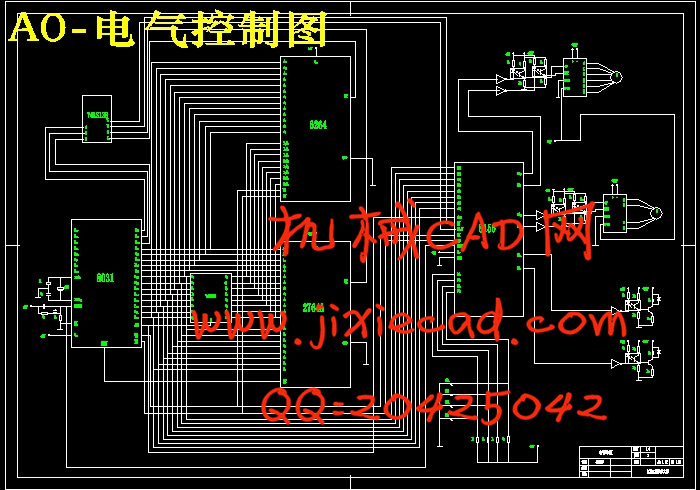
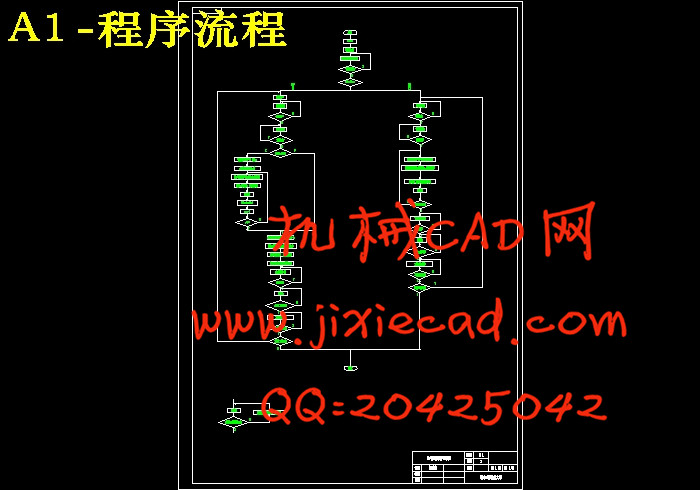
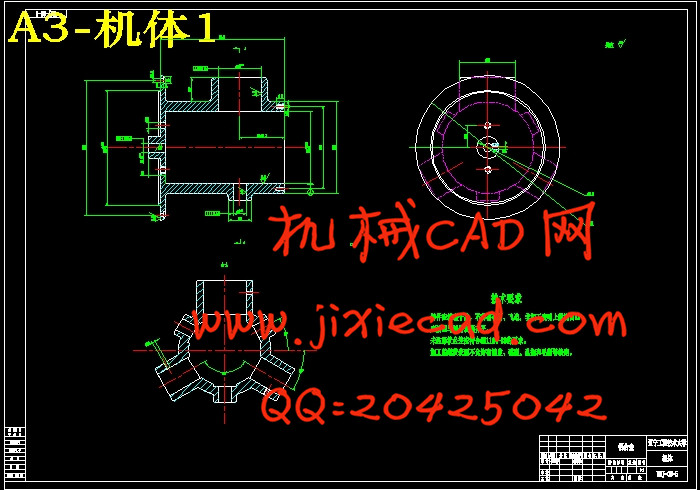
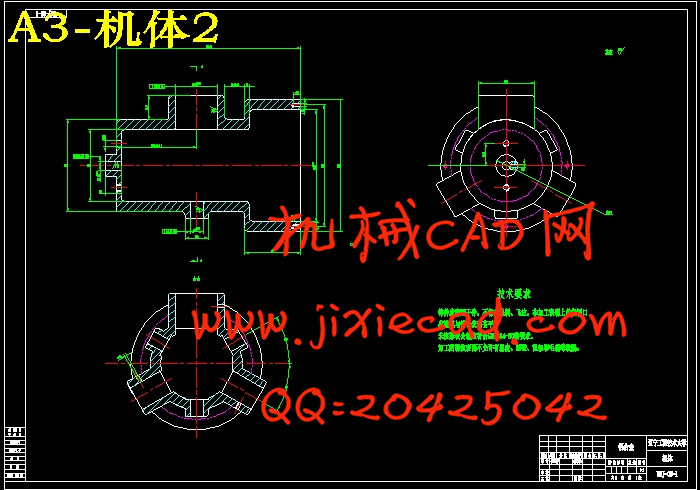
本次题目的内容就是设计一种可在油管内壁爬行,并且搭载工作体的部分可协助工作体完成相应作业的机器人。采用机械结构和电气控制来达到设计目的。要实现的理想过程是:人对主机输入一个控制信号,可以通过单片机对电机、电磁铁进行电气控制,从而使机器人能够按照所搭载工作体的要求进行移动,并在工作体的工作位置做出相应的辅助动作。机器人在行进过程中可在任意位置停止前进,并可以在该位置开始作业,工作体可在步进电机驱动下完成小于360度的任意角度的旋转。
我国早在1987年就开展了管内机器人的研究,并试制了几种模型,但总体水平较国外差。管内机器人研究是机电一体化的高科技研究项目。在石油、化工、核工业、给排水等许多管道工程中,都需要进行管内检测、喷涂及加工等工作,管内机器人在完成这些工作中会发挥重要作用,因此,开发研究管内机器人意义很大[1]。
本次题目的内容就是设计一种可在油管内壁爬行,并且搭载工作体的部分可协助工作体完成相应作业的机器人。采用机械结构和电气控制来达到设计目的。要实现的理想过程是:人对主机输入一个控制信号,可以通过单片机对电机、电磁铁进行电气控制,从而使机器人能够按照所搭载工作体的要求进行移动,并在工作体的工作位置做出相应的辅助动作。机器人在行进过程中可在任意位置停止前进,并可以在该位置开始作业,工作体可在步进电机驱动下完成小于360度的任意角度的旋转。