设计简介
鱼类的形体结构与机器鱼的游动机构设计
摘要
机器人技术的一个重要应用领域是在娱乐方面。在对鱼类游动方式深入研究的基础上,将仿鱼水下推进技术应用于玩具设计,给出了一种仿生机器鱼玩具的机构设计方案及系统的设计、仿真软件,并研制出可在水中运动的仿生机器鱼原型。仿生机器鱼是当前机器人领域的研究热点。大自然的选择使地球上的鱼类具有非凡的水中生活能力,由于游动具有效率高、机动性能好以及对环境扰动小等优点,仿生机器鱼技术的研究已成为当前水下机器人领域研究的热点之一。它为研制高效、高机动性和低噪声的水下运载器提供了新的设计思路。1944年美国麻省理工学院(MIT)成功研制了一个电机驱动的 8 关节新月形对称尾鳍的机器金枪鱼RoboTuna,开启了机器鱼研制的先河,其后多个研究单位都开始了机器鱼的研究与研制,如:日本运输省船舶研究所(SPI)研制了PF系列和UPF系列机器鱼,国内北京航空航天大学研制了5 关节机器海豚等。
关键词:仿鱼推进;仿生机器鱼;
The shape and strcture of fish swimming machine mechanism Design
Author: Wan Zhongyang
Tutor: Kong Lingyun
Abstract
An important application field of robotics is entertainment. On the basis of in-depth study of fish swimming, imitation fish underwater propulsion technology used in toy design, given a ROBOFISH toys institutional design and system design, simulation software, and developed can be movement in the water bionic robotic fish prototypes. The ROBOFISH the field of robotics. The natural choice of fish on Earth has a remarkable ability to live in the water, swimming has advantages of high efficiency, good maneuverability and little disturbance to the environment, the study of biomimetic robotic fish has become the field of underwater robots one of the hotspots. It provides a new design ideas for the development of efficient, high maneuverability and low noise underwater launch vehicle. Massachusetts Institute of Technology (MIT) in 1944 successfully developed a motor-driven machine of eight joint crescent symmetrical tail fin tuna RoboTuna open robotic fish developed by precedent, subsequent research units began the study of robotic fish development, such as: Japanese Ministry of Transport ship Research Institute (SPI) developed a PF series and UPF series of robotic fish domestic Beijing University of Aeronautics and Astronautics has developed a joint machine dolphins.
Key words: Imitation Fish Propulsion; Robofish
目录
第一章 产品综述 1
1.1研究意义 1
1.2设计思想 1
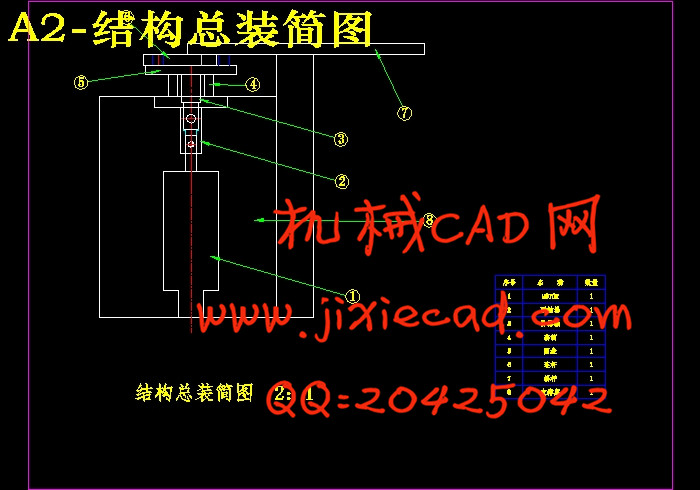
1.3尾部摆动机构三维图 2
1.4 悬浮机构三 4
第二章机构原理 6
2.1设计构思 6
2.2摆动机构设计 7
2.3鱼类游动的运动学模型及特征参数 9
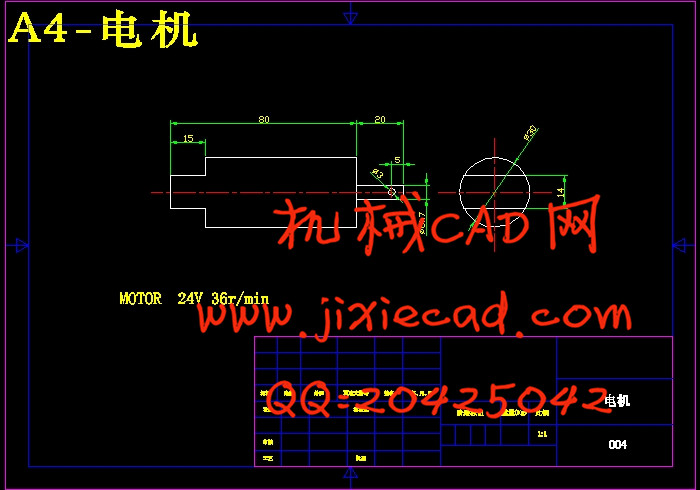
2.4 机器鱼驱动源选择 10
2.5 尾部弹性设计 11
2.6 转弯设计 11
2.7 沉浮机构设计 12
2.8 骨架及密封设计 12
2.9 自由度选择与分段设计方案 14
2.9.1躯干设计 14
2.9.2 头部设计 14
第三章 机器鱼控制系统设计 16
3.1 遥控器及霍尔元件模块 16
3.2 机器鱼电源模块设计 16
3.3 电机及电磁阀驱动模块 17
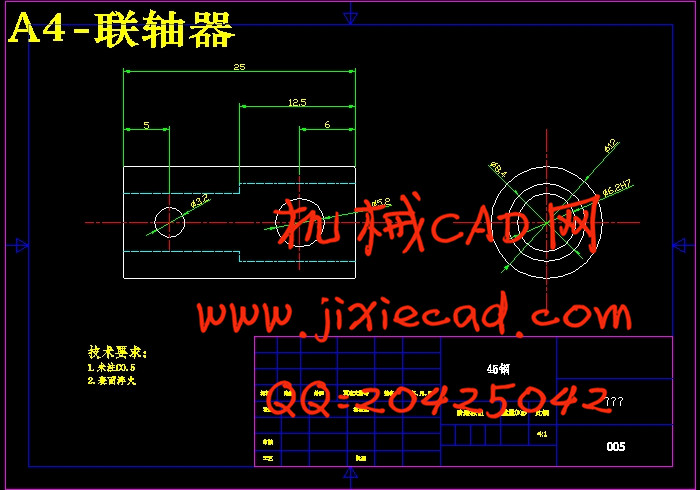
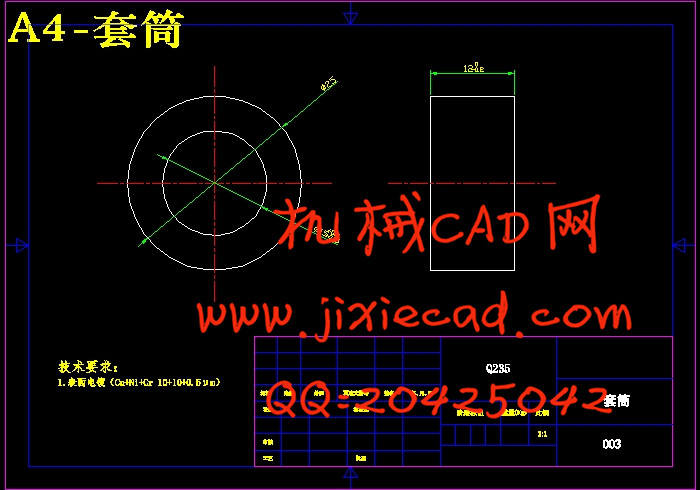
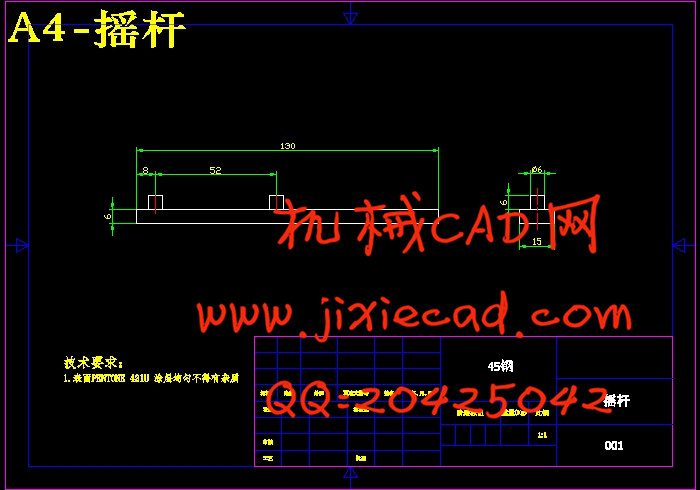
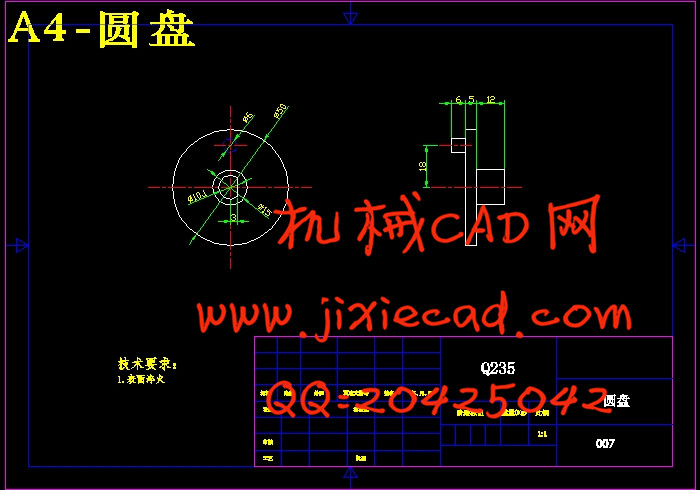
第四章 零件加工 19
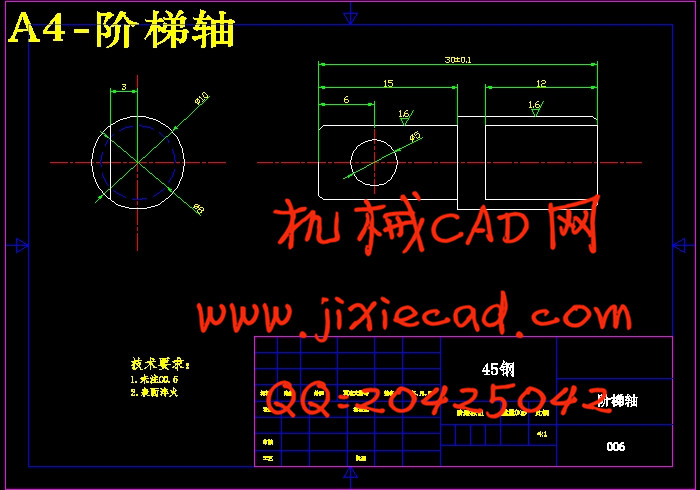
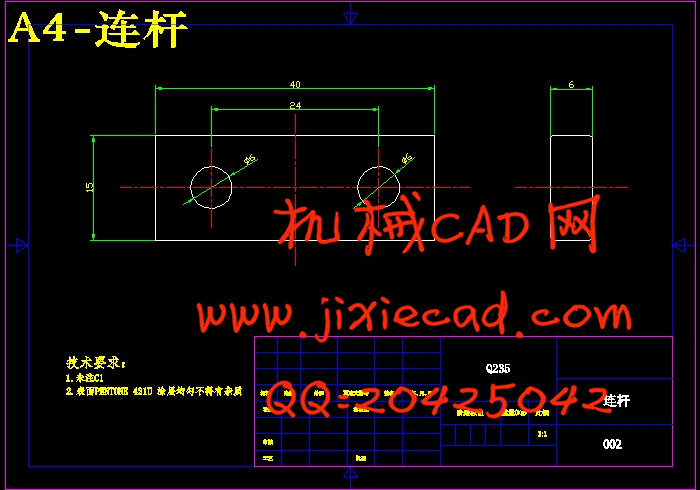
4.1 各个零件的加工方法 19
4.2 部分零件加工NC代码 19
4.3 加工中的问题及解决方案 25
第五章 总结与体会 27
参考文献 29
致 谢 31
摘要
机器人技术的一个重要应用领域是在娱乐方面。在对鱼类游动方式深入研究的基础上,将仿鱼水下推进技术应用于玩具设计,给出了一种仿生机器鱼玩具的机构设计方案及系统的设计、仿真软件,并研制出可在水中运动的仿生机器鱼原型。仿生机器鱼是当前机器人领域的研究热点。大自然的选择使地球上的鱼类具有非凡的水中生活能力,由于游动具有效率高、机动性能好以及对环境扰动小等优点,仿生机器鱼技术的研究已成为当前水下机器人领域研究的热点之一。它为研制高效、高机动性和低噪声的水下运载器提供了新的设计思路。1944年美国麻省理工学院(MIT)成功研制了一个电机驱动的 8 关节新月形对称尾鳍的机器金枪鱼RoboTuna,开启了机器鱼研制的先河,其后多个研究单位都开始了机器鱼的研究与研制,如:日本运输省船舶研究所(SPI)研制了PF系列和UPF系列机器鱼,国内北京航空航天大学研制了5 关节机器海豚等。
关键词:仿鱼推进;仿生机器鱼;
The shape and strcture of fish swimming machine mechanism Design
Author: Wan Zhongyang
Tutor: Kong Lingyun
Abstract
An important application field of robotics is entertainment. On the basis of in-depth study of fish swimming, imitation fish underwater propulsion technology used in toy design, given a ROBOFISH toys institutional design and system design, simulation software, and developed can be movement in the water bionic robotic fish prototypes. The ROBOFISH the field of robotics. The natural choice of fish on Earth has a remarkable ability to live in the water, swimming has advantages of high efficiency, good maneuverability and little disturbance to the environment, the study of biomimetic robotic fish has become the field of underwater robots one of the hotspots. It provides a new design ideas for the development of efficient, high maneuverability and low noise underwater launch vehicle. Massachusetts Institute of Technology (MIT) in 1944 successfully developed a motor-driven machine of eight joint crescent symmetrical tail fin tuna RoboTuna open robotic fish developed by precedent, subsequent research units began the study of robotic fish development, such as: Japanese Ministry of Transport ship Research Institute (SPI) developed a PF series and UPF series of robotic fish domestic Beijing University of Aeronautics and Astronautics has developed a joint machine dolphins.
Key words: Imitation Fish Propulsion; Robofish
目录
第一章 产品综述 1
1.1研究意义 1
1.2设计思想 1
1.3尾部摆动机构三维图 2
1.4 悬浮机构三 4
第二章机构原理 6
2.1设计构思 6
2.2摆动机构设计 7
2.3鱼类游动的运动学模型及特征参数 9
2.4 机器鱼驱动源选择 10
2.5 尾部弹性设计 11
2.6 转弯设计 11
2.7 沉浮机构设计 12
2.8 骨架及密封设计 12
2.9 自由度选择与分段设计方案 14
2.9.1躯干设计 14
2.9.2 头部设计 14
第三章 机器鱼控制系统设计 16
3.1 遥控器及霍尔元件模块 16
3.2 机器鱼电源模块设计 16
3.3 电机及电磁阀驱动模块 17
第四章 零件加工 19
4.1 各个零件的加工方法 19
4.2 部分零件加工NC代码 19
4.3 加工中的问题及解决方案 25
第五章 总结与体会 27
参考文献 29
致 谢 31