设计简介
摘 要
螺杆式粉末定量包装机的结构简单,不需要称重装置,充填效率高,应用十分广泛。螺杆式粉末定量包装机中的主要研究对象时螺杆,其主要原理为通过控制螺杆的旋转圈数或旋转时间来控制被充填物料的重量。本文结合粉末颗粒物料的运动物理性质,首先运用单质点法对粉末颗粒的下料过程利用数学表达式进行了描述,确定单个粒子的下料轨迹方程,并分析了粉末颗粒在xyz三个方向的速度及加速度的变化。研究了运动中的粉末颗粒的受力情况,以及粉末颗粒的受力与螺杆的几何参数关系。其次分析计算阿基米德螺杆旋转时每个螺杆导程所包含物料容积的公式,阿基米德螺杆的轴向剖面是一个梯形,将整个梯形剖面分成两个三角形与一个矩形,利用积分方法分别求出它们的容积相加后即得整个螺杆导程内所包含粉末物料的容积。再次对螺杆充填的理论功率与实际功率做了分析,得到螺杆充填效率的表达式。为了得到较高的螺杆充填效率,综合考虑螺杆的几何参数和螺杆转速之间的关系。
关键词: 螺杆式;定量包装机;颗粒物料;
Abstract
The powder quantitative packaging machine is simple, do not need weighing device and, with high filling efficiency,the application has been used widespread.The screw play an important role in powder quantitative packaging machine. The main principle is that it can control the filling material weight by controlling the lap or rotating time. Based on the basic physics of powder materials properties.Firstly,use the mathematical method to descript the powder particles blanking process, determine the trajectory equation of the single particle materials and analyses powder particles velocity in three directions, that is xyz velocity and acceleration of change.Studied the movement of powder particles between the stress of powder particles and the screw geometry parameter relation. Secondly,analysis and calculate the volume of the Archimedes screw Archimedes screw axial profile is a whole trapezoidal profile trapezoid, will be divided into two triangles and a rectangular,using integral method respectively and ask out their volume, and then adding them, the whole screw palpitation’s volume will be get. Thirdly, analysis the theory of power and actual power,getting auger filling efficiency of expression. In order to get a higher auger filling efficiency,need consider the relationship between the screw speed the screw geometric parameters.
Key words: Screw; Quantitative packaging machine; Particulate material
目 录
摘 要
Abstract
目 录
1 绪论
1.1课题的研究内容和意义
1.2国内外的发展概况
1.3课题研究目的和意义
1.4 课题研究的主要内容
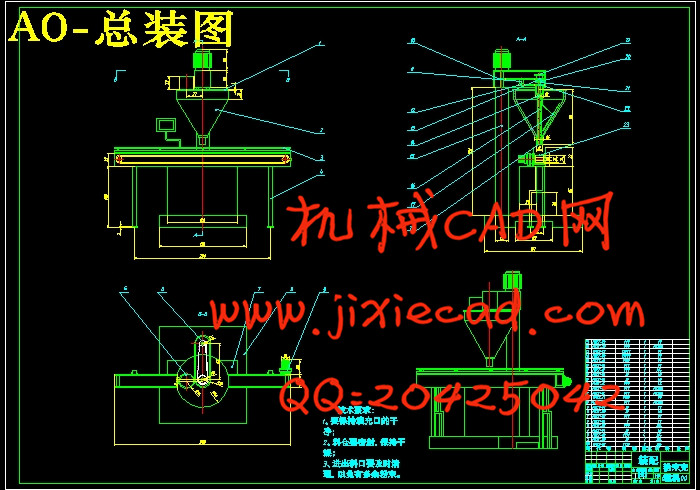
2 粉末充填机总体设计方案
2.1 引言
2.2 粉末灌装工艺过程及可行性分析
2.2.1工艺分析
2.2.2总体布局
2.3 总体传动系统
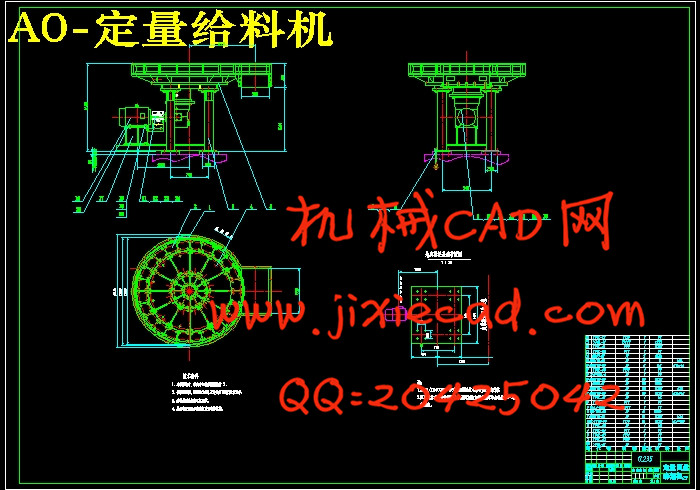
2.3.1上料系统
2.3.2计量充填系统
2.3.3输送系统
2.3.4自动控制系统
2.4 粉末物料的基本性质
2.5 同心旋转形成的涡旋机理
2.5.1涡旋的定义
2.5.2螺杆旋转形成的涡旋机理
2.6 本章小结
3 粉末颗粒下料的运动分析
3.1 引言
3.2 粉末颗粒运动轨迹方程
3.2.1 研究方法
3.2.2 速度分析
3.2.3 轨迹方程
3.3 粉末颗粒受力分析
3.4 容积计算
3.4.1 研究方法
3.4.2 展开高度
3.4.3 三角形区域的容积
3.4.4 矩形区域的容积
3.5 本章小结
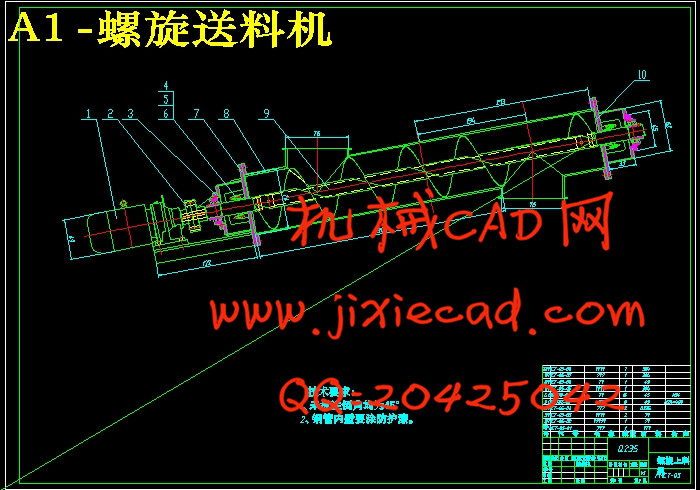
4 螺旋输送机结构设计
4.1 螺旋输送机的简介
4.2 旋输送机总体结构设计
4.2.1 电机的选择
4.2.2 输送机的螺旋直径和螺旋轴的转轴
4.2.3 螺旋输送机的功率计算和驱动装置的型号选择
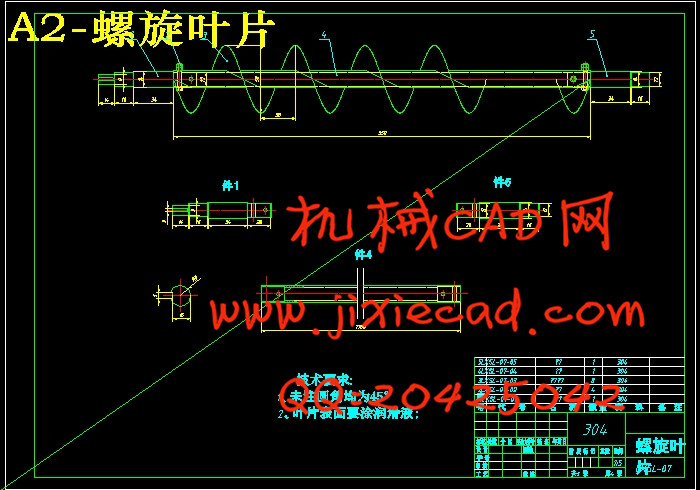
4.2.4螺旋叶片的表面展开尺寸
4.3 驱动端装置设计
4.3.1 驱动端轴的最小直径的确定
4.3.2 驱动轴的结构设计
4.4 中间轴承装置
4.5 尾端装置的设计
4.5.1计算轴的最小直径
4.5.2 尾端轴的结构设计
4.6 驱动装置和尾端装置轴的校核
4.6.1 驱动装置的受力分析
4.6.2 前端轴的校核
4.6.3 尾端轴的校核
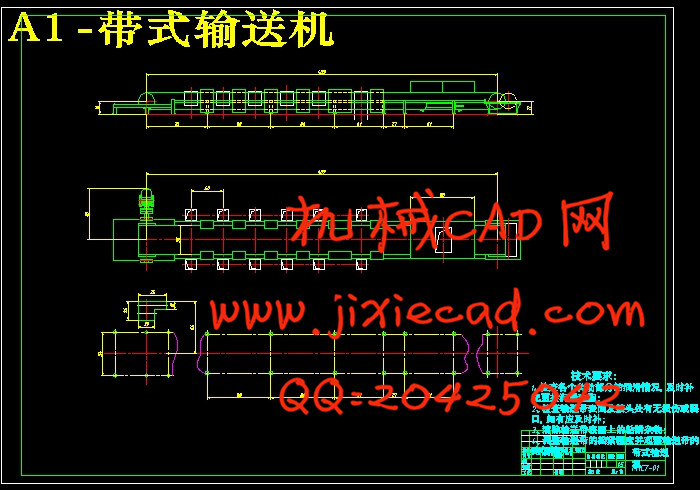
5带式输送机结构简介
5.1带式输送机的应用
5.2带式输送机的工作原理
5.3传动形式与驱动装置
5.3.1 传动形式的选择
5.3.2 驱动装置的选择
6 结论与展望
6.1总结
6.2问题与展望
致 谢
参考文献