设计简介
智能机器狗结构设计
摘要
对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器狗将作为家庭的一员进入我们的生活,与我们每天朝夕相处。可现在普遍存在人们心中的疑问是:将来机器狗将以何种身份进入我们的生活,是玩伴还是佣人,智能机器狗的设计就是为了将来机器狗能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
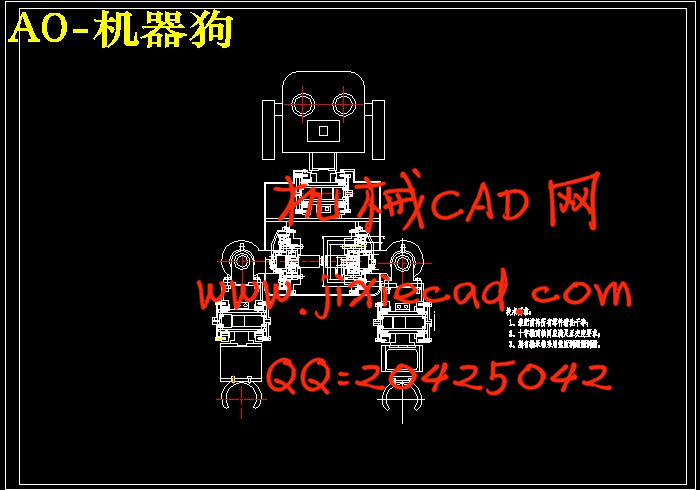
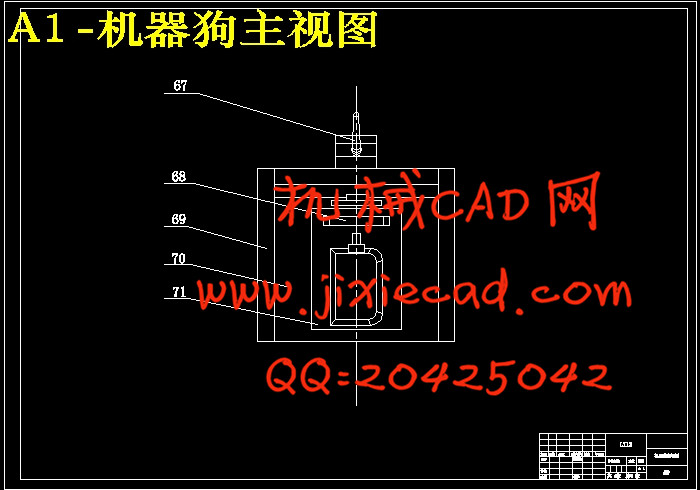
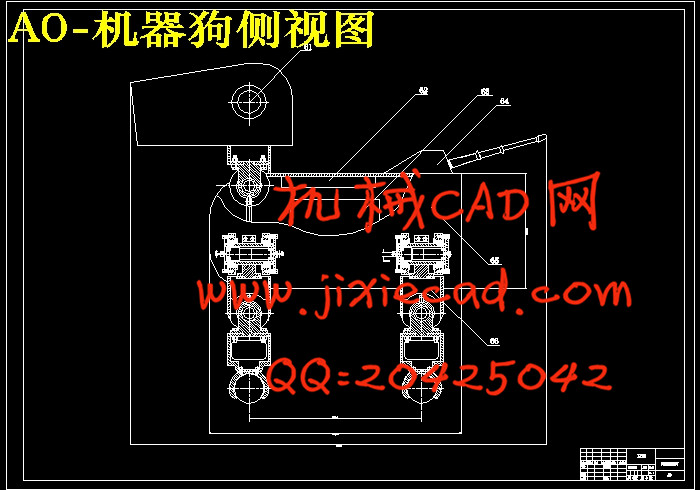
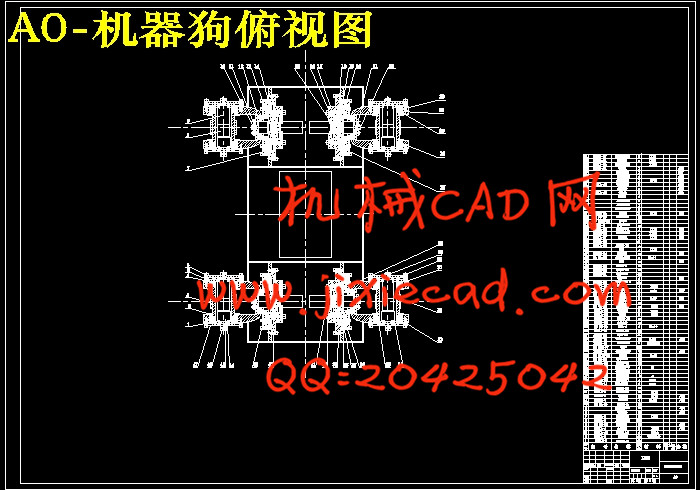
本设计采用关节型结构,成功地设计了智能机器狗的本体结构。本机器狗具有前后行、平地侧行等基本行走功能。另外机器狗头部还装有CD摄影机,胸腔内部可装备内置电源和智能设备。本设计参考了狗的结构组成,使得机器狗结构尽量与狗的本体结构相似,尤其在长度配比方面。本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能机器狗; 结构设计; 谐波传动
Intelligent robot dog frame design
Abstract
For our future life, everyone had different ideas, but most people believe that, in future society, the robot dog as a family into our lives, and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot dog into our lives, playmates or servants, the design of intelligent robot dog is to the future robot can enter our Chinese people's family lives, for our happy family life.
The design of a joint structure, the successful design of intelligent robot dog, the body structure. The robot dog has before and after the trip, the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head, chest internal equipment can be built-in power supply, and intelligent. The reference design of the structure of the dog, making the structure as the robot dog, the dog's body similar to the structure, particularly in the area ratio of length. The design of the structure is more complicated, the large number of joints, in an effort to optimize the design, designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer, the slowdown in the programme reduction ratio, high efficiency, The ideal slowdown is a good programme.
Keywords intelligent robot dog; structural design; harmonic drive
目录
摘要 I摘要
对于我们的未来生活,每个人有不同的构想,但大多数人都相信,在将来的社会,机器狗将作为家庭的一员进入我们的生活,与我们每天朝夕相处。可现在普遍存在人们心中的疑问是:将来机器狗将以何种身份进入我们的生活,是玩伴还是佣人,智能机器狗的设计就是为了将来机器狗能进入我们中国人的家庭生活,为我们的家庭生活带来欢乐。
本设计采用关节型结构,成功地设计了智能机器狗的本体结构。本机器狗具有前后行、平地侧行等基本行走功能。另外机器狗头部还装有CD摄影机,胸腔内部可装备内置电源和智能设备。本设计参考了狗的结构组成,使得机器狗结构尽量与狗的本体结构相似,尤其在长度配比方面。本设计的结构比较复杂,关节数目众多,为了力求优化设计,设计者兼顾了关键部件的互换性和结构紧凑的原则。所有的关节都用了2036型的直流伺服电机作为驱动源,充分利用伺服电机的特性。伺服电机的驱动都采用了谐波减速器机构,该减速方案减速比大、效率高,是比较理想的减速方案。
关键词:智能机器狗; 结构设计; 谐波传动
Intelligent robot dog frame design
Abstract
For our future life, everyone had different ideas, but most people believe that, in future society, the robot dog as a family into our lives, and we can now daily overnight with the common people's hearts Question is: what will be the future status of robot dog into our lives, playmates or servants, the design of intelligent robot dog is to the future robot can enter our Chinese people's family lives, for our happy family life.
The design of a joint structure, the successful design of intelligent robot dog, the body structure. The robot dog has before and after the trip, the ground adjacent to the basic operating functions. Another robot is also equipped with CD camera head, chest internal equipment can be built-in power supply, and intelligent. The reference design of the structure of the dog, making the structure as the robot dog, the dog's body similar to the structure, particularly in the area ratio of length. The design of the structure is more complicated, the large number of joints, in an effort to optimize the design, designers take into account the interchangeability of key components of the compact structure and principles. All joints are composed of a 2036-type of DC servo motor as a driver and make full use of servo motor characteristics. Servo motor drives are used harmonic reducer, the slowdown in the programme reduction ratio, high efficiency, The ideal slowdown is a good programme.
Keywords intelligent robot dog; structural design; harmonic drive
目录
Abstract II
第1章 绪论 1
1.1 本课题的来源、研究目的和意义 1
1.2 国内外智能机器人的发展概况 3
1.3 本设计的主要内容 5
第2章 智能机器狗的设计 6
2.1自由度的分配及结构方案的设计 6
2.1.1自由度的分配 6
2.1.2结构方案的设计 6
2.2关节驱动方案的选择 9
2.3传动方案的选择 10
2.3.1传动方式 10
2.3.2减速器和减速比的选择 10
2.3.3电机与减速器的连接方式 13
2.4结构特点及性能参数 14
2.4.1智能机器狗的结构特点 14
2.4.2智能机器狗的结构性能参数 14
第3章 部分关节部件设计计算 17
3.1各关节力矩的计算 17
3.1.1膝关节静力矩的计算 17
3.1.2髋关节向前后运动自由度的静力矩的计算 17
3.1.3髋关节左右摆动时静力矩的计算 18
3.1.4颈关节摆动时的静力矩的计算 20
3.2谐波传动组件的选择与计算 20
3.3圆柱齿轮减速器组件选择与计算 20
3.4各关节所需电机的选择与计算 21
第4章 其它部件的选择 23
第5章 成本估算和环保分析 25
5.1成本估算 25
5.2环保与经济分析 25
结论 27
致谢 28
参考文献 29