设计简介
摘 要
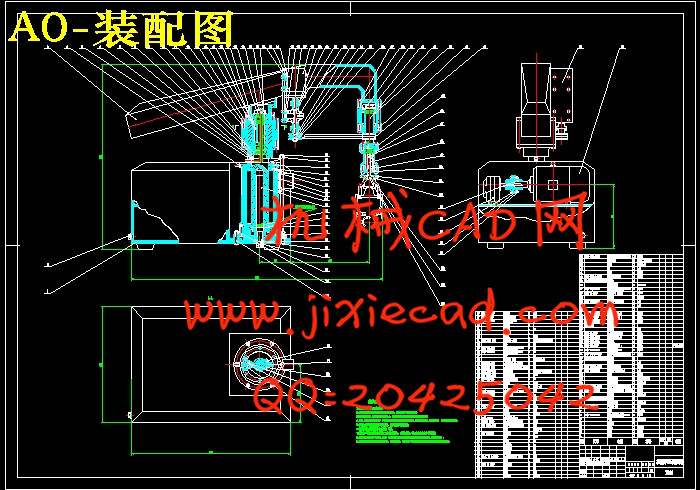
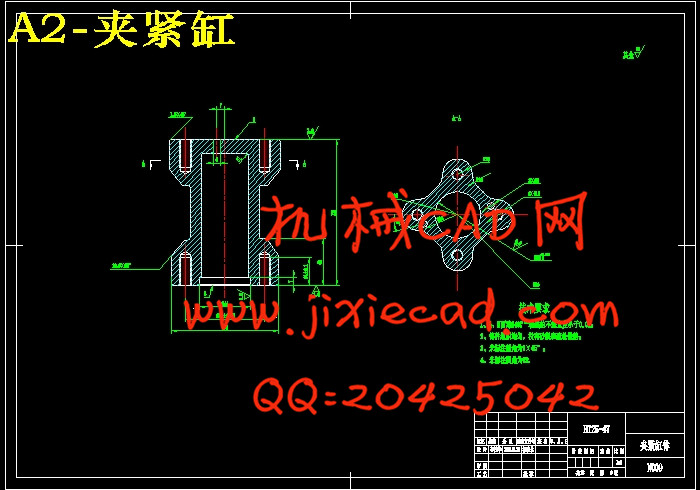
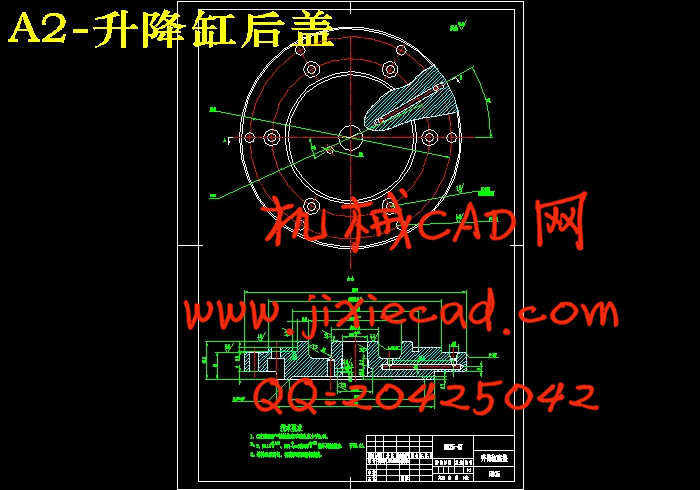
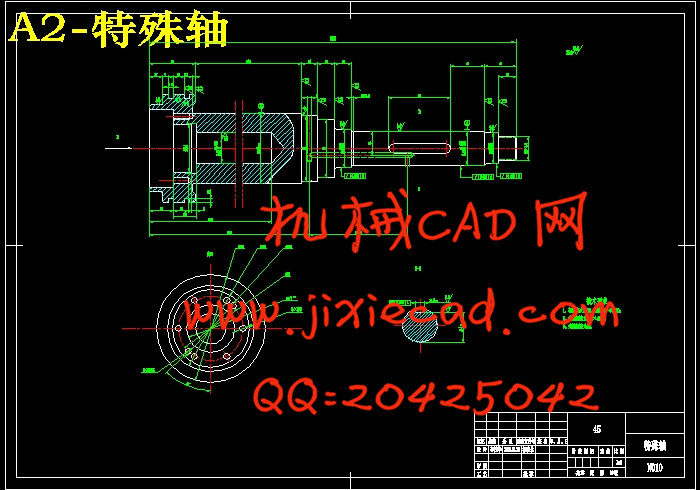
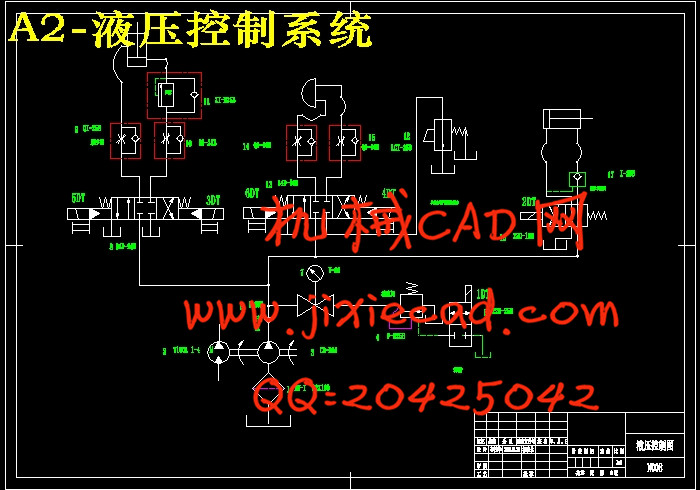
随着现代机械工业的不断发展,科学技术日新月异,尤其是微机单片机等技术的出现以及他们的优越的性能不断完善,还有现代测试技术的渗透发展,为了能在21世纪激烈的竞争中立于不败之地,对各行各业提出了更高的要求,尤其是科技含量还有就是效率,效率决定竞争的胜败,因此很多传统的手工作业,特别是机械行业必须要求用现代化、自动化的机械代替人的工作,这样可以节省人力,提高效率,提高竞争力。因此就出现了工业机器人,可以代替人做不同的工作。后来为了使机器人更加专用化,减少成本,简单化,又要求一种特别的机器人,专用机械手就是其中一个。在这里我将设计一个药瓶盖旋紧机械手,他是一个集机械、电气、测试、微机于一体的典型的机电一体化产品。由机械部分作为他的执行机构,电气和液压作为驱动机构,各种传感器和电位器作为测试元件,单片机作为控制机构的一个专用机械手。本设计本着简单、实用、经济、高效的原则,仅是为瓶盖旋紧而特地设计的专用机械手,他只有三个自由度,包括手臂的升降、手臂的旋转还有手腕的旋转的三个自由度。他是由液压控制手臂的升降、回转和手指的夹紧放松,用步进电机实现旋紧动作,用压力传感器测定是否夹紧,防止夹坏或者夹不稳。这种设计既简单又能实现所要的功能,是一个圆柱坐标式机械手。本文将对这个专用机械手进行方案的设计、分析、比较然后确定最优方案,还要进行强度硬度等有关的校核、以及尺寸的确定,最后画出总装配图。
关键词:专用机械手;旋紧;单片机控制;混合驱动;计算校核
Abstract
As the mechanical industry unceasingly develops, science and technology change with each passing day, especially the appearance of microcontroller and microcomputer makes it develop faster with their excellent function that is perfecter, meanwhile, which is with infiltration of development of modern measuring and testing technique. For standing up for ever in cutthroat competition in the 21st century, pushing all walks of life needs higher requirement, especially including Scientific and technological content and efficiency, because efficiency decides who will be winner, much traditional work of hand esecially for Machinery Industry must require to use the machines of modernization and automation to do work commonly done by persons, so it can save manpower, improve efficiency and improve the competitive power. So industrial robot appears with the very reasons, who can replace people to do different jobs. Then for the purpose of speciality in robot , reducing cost and simplification, it requires a kind of special robot, to which special manipulator belongs. Here I will design a manipulator using for tightening cover of medicine bottle, it is typically a kind of product about mechanotronics, which includes mechnism、electric、testing and microcomputer. The parts of machine is actuator, electric and hydraulic pressure is driver, all kinds of sensors and potentiometer are used for testing components, microcontroller controls manipulator as control mechnasm. The special manipulator used for tightening the cover of medicine bottle has three DOF. Hydraulic pressure controls the movement and rotation of the arm and clamping and disentwining of hand of manipulator with wrist owning three DOF. Using step motor realize the action of tightening ,using force sensors measures whether it is clamped, which prevented parts to be broken or instable. This design is not only simple ,but also it can realize some function we need, it is a rectangular coordinate’s manipulator. This paper decides to most excellent solution through designing , anlyzing and comparing manipulator’s solution , meanwhile, by checking intensity, rigidity and so on and ensuring responding dimension, at last I draw general assembly drawing.
Key words: special manipulator; tightening; microcontroller control; couple driving; checking calculation目 录
引言 1随着现代机械工业的不断发展,科学技术日新月异,尤其是微机单片机等技术的出现以及他们的优越的性能不断完善,还有现代测试技术的渗透发展,为了能在21世纪激烈的竞争中立于不败之地,对各行各业提出了更高的要求,尤其是科技含量还有就是效率,效率决定竞争的胜败,因此很多传统的手工作业,特别是机械行业必须要求用现代化、自动化的机械代替人的工作,这样可以节省人力,提高效率,提高竞争力。因此就出现了工业机器人,可以代替人做不同的工作。后来为了使机器人更加专用化,减少成本,简单化,又要求一种特别的机器人,专用机械手就是其中一个。在这里我将设计一个药瓶盖旋紧机械手,他是一个集机械、电气、测试、微机于一体的典型的机电一体化产品。由机械部分作为他的执行机构,电气和液压作为驱动机构,各种传感器和电位器作为测试元件,单片机作为控制机构的一个专用机械手。本设计本着简单、实用、经济、高效的原则,仅是为瓶盖旋紧而特地设计的专用机械手,他只有三个自由度,包括手臂的升降、手臂的旋转还有手腕的旋转的三个自由度。他是由液压控制手臂的升降、回转和手指的夹紧放松,用步进电机实现旋紧动作,用压力传感器测定是否夹紧,防止夹坏或者夹不稳。这种设计既简单又能实现所要的功能,是一个圆柱坐标式机械手。本文将对这个专用机械手进行方案的设计、分析、比较然后确定最优方案,还要进行强度硬度等有关的校核、以及尺寸的确定,最后画出总装配图。
关键词:专用机械手;旋紧;单片机控制;混合驱动;计算校核
Abstract
As the mechanical industry unceasingly develops, science and technology change with each passing day, especially the appearance of microcontroller and microcomputer makes it develop faster with their excellent function that is perfecter, meanwhile, which is with infiltration of development of modern measuring and testing technique. For standing up for ever in cutthroat competition in the 21st century, pushing all walks of life needs higher requirement, especially including Scientific and technological content and efficiency, because efficiency decides who will be winner, much traditional work of hand esecially for Machinery Industry must require to use the machines of modernization and automation to do work commonly done by persons, so it can save manpower, improve efficiency and improve the competitive power. So industrial robot appears with the very reasons, who can replace people to do different jobs. Then for the purpose of speciality in robot , reducing cost and simplification, it requires a kind of special robot, to which special manipulator belongs. Here I will design a manipulator using for tightening cover of medicine bottle, it is typically a kind of product about mechanotronics, which includes mechnism、electric、testing and microcomputer. The parts of machine is actuator, electric and hydraulic pressure is driver, all kinds of sensors and potentiometer are used for testing components, microcontroller controls manipulator as control mechnasm. The special manipulator used for tightening the cover of medicine bottle has three DOF. Hydraulic pressure controls the movement and rotation of the arm and clamping and disentwining of hand of manipulator with wrist owning three DOF. Using step motor realize the action of tightening ,using force sensors measures whether it is clamped, which prevented parts to be broken or instable. This design is not only simple ,but also it can realize some function we need, it is a rectangular coordinate’s manipulator. This paper decides to most excellent solution through designing , anlyzing and comparing manipulator’s solution , meanwhile, by checking intensity, rigidity and so on and ensuring responding dimension, at last I draw general assembly drawing.
Key words: special manipulator; tightening; microcontroller control; couple driving; checking calculation目 录
1 绪论 3
1.1 机械手设计的目的 3
1.2 机械手设计的内容 3
1.3 机械手设计的要求 3
2 机械手的方案选择 4
2.1 机械手的组成 4
2.1.1执行机构 4
2.1.2驱动机构 5
2.1.3控制系统 5
2.1.4基体 6
2.2 方案的比较选择 6
2.2.1手部的选定 6
2.2.2腕部的选定 7
2.2.3臂部的选定 8
2.2.4驱动系统的选定 9
3 计算校核 12
3.1 计算机械手手部的夹紧驱动力 12
3.2 腕部回转力矩的计算 14
3.3 臂部与机身的计算 15
3.3.1手部作升降运动的液压缸驱动力的计算 15
3.3.2手臂回转液压缸的计算 17
4 驱动的选择 19
4.1 液压控制部分 19
4.1.1液压控制简介 19
4.1.2液压系统传动方案的确定 19
4.2 步进电机控制部分 25
4.2.1步进电机的介绍 25
4.2.2选择步进电机 28
4.2.3选择步进电机的联轴器 29
4.2.4步进电机的驱动方式选择 30
5 检测和控制 32
6 设计总结 34
谢 辞 35
参考文献 36