设计简介
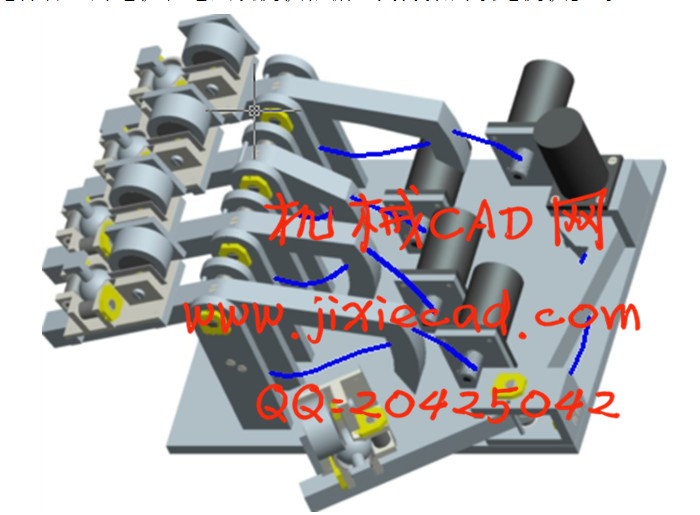
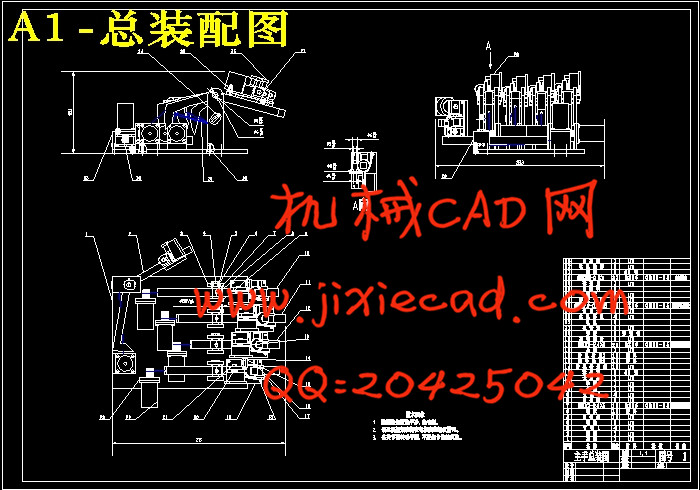
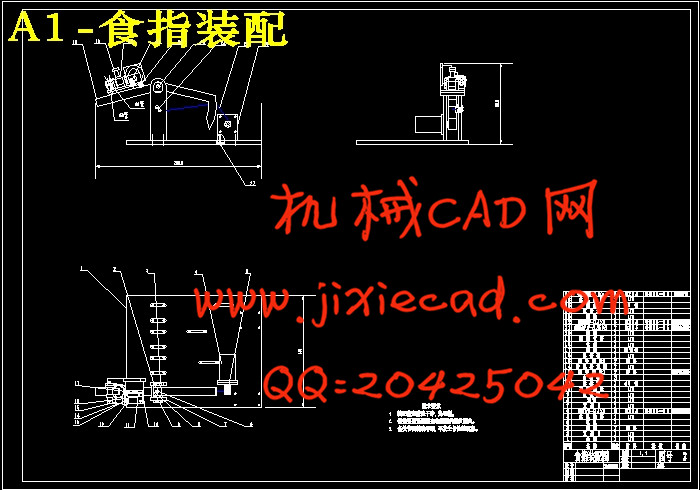
抓握式灵巧手主手机械系统设计
最后,运用ADAMS软件对主手的静力学和动力学特性进行了仿真分析,依此优化设计方案。
关键词:五指灵巧手,触感交互装置,结构优化设计,ADAMS
The Design of Mechanical System of a Dexterous Hand Master
Finally, we simulate the statics and dynamics of this device using ADAMS. The optimization of the design is based on the results of the simulation.
Key Words:Dexterous hand; Haptic interface device; Structural optimal design; ADAMS
目 录
摘 要 i
Abstract ii
第一章 引 言 1
1.1 灵巧手系统的发展概况 1
1.2 灵巧型触感装置的介绍 4
1.2.1 穿戴型主操作手例说 5
1.2.2 桌面型主操作手例说 6
第二章 抓握式灵巧手主手的设计概述 8
2.1 设计综述 8
2.2 灵巧手主手设计任务 9
第三章 抓握式灵巧手主手的设计 10
3.1 简介 10
3.2 灵巧手主手指根关节设计 11
3.2.1 指根关节工作原理 11
3.2.2 指根关节的具体设计 12
3.3 灵巧手主手指尖关节设计 13
3.3.1 指尖关节设计方案 13
3.3.2 指尖关节的力反馈单元设计 15
3.3.3小结 19
第四章 主手的仿真分析 20
4.1 ADAMS软件介绍 20
4.2 指尖机构的仿真分析 21
4.2.1 指尖机构的仿真建模与任务 21
4.2.2 指尖机构的仿真过程 22
4.3 手指架的仿真分析 24
4.3.1 手指架的仿真建模与任务 24
4.3.2 手指架的仿真过程 25
4.4 仿真小结 27
第五章 总结与展望 28
参 考 文 献 30
致 谢 31
附录 32
摘 要
本文设计并优化了一种五指输入的鼠标型抓握式灵巧手主操作手。灵巧手可用于太空探索、核能开发、医疗器械等人难以适应的极端和精密微操作环境中以替代人手作业。主操作手是灵巧手系统中用于测量人手运动位姿并实现力反馈的触感交互装置。我们从电脑鼠标获得启示,设计一种符合人手操作习惯,小巧、简单的主操作手。它的每根手指具有三个自由度,每个自由度都能实现力反馈。这种装置的指根关节采用杠杆原理实现,由直流电机驱动钢丝拉动手指后端实现力反馈。指尖关节采用滚球鼠标传动原理设计,通过控制一个球套环逐渐抱紧滚球,增大滚动阻力实现力反馈。最后,运用ADAMS软件对主手的静力学和动力学特性进行了仿真分析,依此优化设计方案。
关键词:五指灵巧手,触感交互装置,结构优化设计,ADAMS
The Design of Mechanical System of a Dexterous Hand Master
Abstract
In this paper, the design and optimization of a five-fingered mouse-shaped dexterous hand master is proposed. The dexterous hands are applied for tasks that are difficult for human to execute, such as dexterous micro operation and operation in extreme environments: space exploration, nuclear energy development and medical device. The dexterous hand master, as a haptic interface, can measure movement of the operator and display force feedback. From the idea of the computer mouse, we designed a simple compact master hand which is adapted to the human hand. It is manipulated on the desk. Each finger of this device has three DOF with feedback in three directions. The root joint of this device is designed in the use of leverage and its force feedback is transmitted from the DC motor through a rotation link. Front finger part of the device is designed based on the principle of ball mouse. We use a spherical ring wraps a ball. The rolling resistance, as the force feedback on the joints, increases with the contraction of the ring.Finally, we simulate the statics and dynamics of this device using ADAMS. The optimization of the design is based on the results of the simulation.
Key Words:Dexterous hand; Haptic interface device; Structural optimal design; ADAMS
目 录
摘 要 i
Abstract ii
第一章 引 言 1
1.1 灵巧手系统的发展概况 1
1.2 灵巧型触感装置的介绍 4
1.2.1 穿戴型主操作手例说 5
1.2.2 桌面型主操作手例说 6
第二章 抓握式灵巧手主手的设计概述 8
2.1 设计综述 8
2.2 灵巧手主手设计任务 9
第三章 抓握式灵巧手主手的设计 10
3.1 简介 10
3.2 灵巧手主手指根关节设计 11
3.2.1 指根关节工作原理 11
3.2.2 指根关节的具体设计 12
3.3 灵巧手主手指尖关节设计 13
3.3.1 指尖关节设计方案 13
3.3.2 指尖关节的力反馈单元设计 15
3.3.3小结 19
第四章 主手的仿真分析 20
4.1 ADAMS软件介绍 20
4.2 指尖机构的仿真分析 21
4.2.1 指尖机构的仿真建模与任务 21
4.2.2 指尖机构的仿真过程 22
4.3 手指架的仿真分析 24
4.3.1 手指架的仿真建模与任务 24
4.3.2 手指架的仿真过程 25
4.4 仿真小结 27
第五章 总结与展望 28
参 考 文 献 30
致 谢 31
附录 32