设计简介
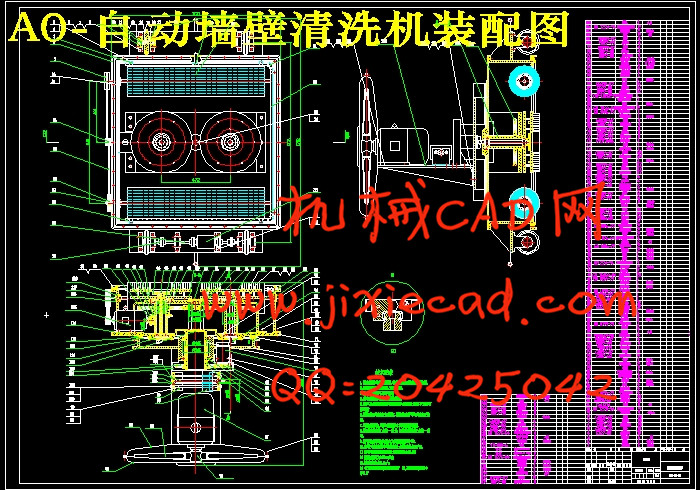
自动墙壁清洗机设计
摘 要:近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗机器人。在简单介绍清洗机器人的国内外研究现状的基础上,基于二维软件CAD对四轮式风压吸附清洗机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。设计的清洗机器人采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体表面,避免了清洗机器人对壁面的局限,降低了控制难度;清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成;采用无人化清洗,自动清洗,自动供水,自动供清洗液,单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直表面直线行走。本机的清洗效率较高,清洗效果良好。
关键字:清洗机器人;风压吸附;齿轮机构;刷洗
Design of Automatic Wall Cleaning Machine
Abstract:In recent years, with the development of society, more and more floors, with glass curtain wall building more and more to avoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning. This paper briefly wall-climbing robot based on the research status, based on 2D software, CAD, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation. This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure;By pressure adsorption,robot using the pressure generated by the propeller on the compressed air pressure in the surface,avoiding the clear limitations of the robot on the wall,reducing the difficulty of control;Washing machine is suspended by a servo system, cleaning host and consists of computer control system;The cleaning of the unmanned, automatic cleaning, automatic water supply for automatic washing liquid, single chip control system, operating only through the keyboard to manipulate the work of the washing machine in the cleaning process, the washing machine to automatic edge recognition, according tothe building floor wash for vertical or horizontal wash;Rear-wheel drive, a motor to drive the two rear wheels, rear wheel drive the front wheels to complete the robot to walk, use of the spur gear transmission device as reducer;Roof supply; robot walk a straight line can be horizontal or vertical surface. The higher the cleaning efficiency of the machine a good cleaning effect.
Key words: Cleaning Robot;Pressure Adsorption Mode; Gear mechanism; Scrub;
目 录
摘要………………………………………………………………………………………1
关键词……………………………………………………………………………………1
1前言……………………………………………………………………………………2
1.1 课题研究的目的和意义……………………………………………………………2
1.2 课题研究现状及分析………………………………………………………………2
1.2.1 国外壁面清洗机器人研究现状…………………………………………………2
1.2.2 国内壁面清洗机器人研究现状…………………………………………………3
1.3 高层建筑外墙清洗机发展趋势……………………………………………………4
2清洗机器人总体方案设计……………………………………………………………5
2.1 对楼顶楼面的实际考察……………………………………………………………5
2.1.1楼面结构考察……………………………………………………………………5
2.1.2 楼顶的实际考察…………………………………………………………………5
2.2 清洗机器人的总体方案……………………………………………………………5
2.3 清洗机器人清洗系统方案…………………………………………………………6
2.4 清洗机器人爬壁系统方案…………………………………………………………7
2.5 清洗机器人控制系统方案…………………………………………………………7
2.5.1设计的基本原则…………………………………………………………………7
3 清洗机器人清洗系统设计……………………………………………………………8
3.1 清洗机器刷洗部分设计……………………………………………………………8
3.1.1 盘刷设计…………………………………………………………………………8
3.1.2 滚刷设计…………………………………………………………………………9
3.1.3刷洗部分所用弹簧的设计………………………………………………………10
3.2 内空心轴设计………………………………………………………………………11
3.3 清洗机主机滚轮的设计计算………………………………………………………11
3.4 主机上传感器及行程开关的选择…………………………………………………12
3.5复合缆的结构设计…………………………………………………………………12
4 清洗机器人风压系统设计……………………………………………………………13
4.1 采用风压的意义……………………………………………………………………13
4.2 基本原理……………………………………………………………………………13
4.3 气动计算的原始数据与技术要求…………………………………………………13
4.4 风压部分力学计算…………………………………………………………………14
5 清洗机器人主要零件设计……………………………………………………………15
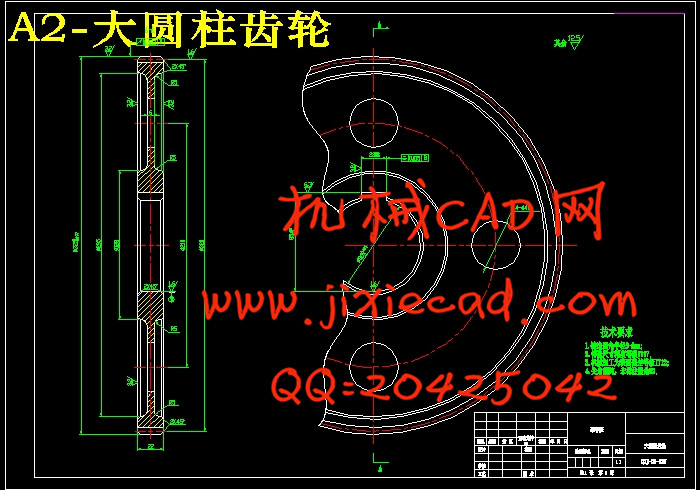
5.1 直齿轮副的设计计算………………………………………………………………15
5.1.1 齿轮的设计计算及强度校核……………………………………………………15
5.1.2 齿面接触疲劳强度计算…………………………………………………………17
5.1.3 齿根抗弯疲劳强度验算…………………………………………………………19
5.1.4 齿面静强度计算…………………………………………………………………20
5.1.5 齿根(抗弯)静强度验算………………………………………………………20
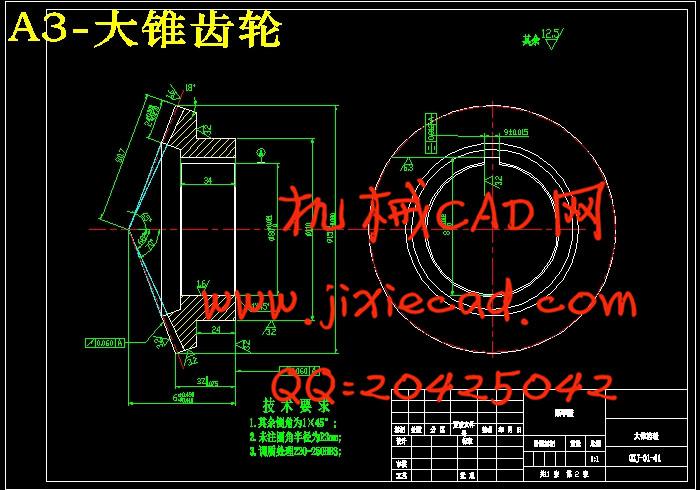
5.2 锥齿轮副的设计计算………………………………………………………………21
5.2.1 基础尺寸确定……………………………………………………………………21
5.2.2 确定载荷系数K…………………………………………………………………22
5.2.3 齿面接触疲劳强度计算…………………………………………………………22
5.2.4 齿根抗弯疲劳强度计算…………………………………………………………23
5结论……………………………………………………………………………………24
参考文献 ………………………………………………………………………………24
致谢………………………………………………………………………………………26
摘 要:近年来,随着社会的发展,楼层越来越高,使用玻璃幕墙的楼房也越来越多,避免清洗时一个很重要的问题,传统的方式多数为人工,或者是采用电缆从楼顶将机器人吊下,工作效率偏低,危险性高,于是清洗用爬壁机器人应运而生,本文的任务就是设计一种能够在壁面上吸附行走的清洗机器人。在简单介绍清洗机器人的国内外研究现状的基础上,基于二维软件CAD对四轮式风压吸附清洗机器人的本体机构进行了设计,对一些关键部分进行了设计计算及校核计算,重点是爬壁机器人的移动结构、吸附结构和驱动系统的设计计算。设计的清洗机器人采用四轮式小车形状结构,结构简单;采用风压吸附方式,利用螺旋桨对空气的压缩所产生的压力将机器人压在物体表面,避免了清洗机器人对壁面的局限,降低了控制难度;清洗机主要由伺服悬吊系统、清洗主机和由计算机控制系统组成;采用无人化清洗,自动清洗,自动供水,自动供清洗液,单片机系统控制,操作人员只需通过键盘即可操纵清洗机工作,而且在清洗过程中,清洗机能够自动进行边缘识别,可根据建筑楼层的具体情况选择为纵洗或横洗;采用后轮驱动,一个电机驱动两个后轮,后轮带动前轮完成机器人的行走,使用直齿圆柱齿轮传动装置作为减速器;采用楼顶供电;机器人可以在水平面或者垂直表面直线行走。本机的清洗效率较高,清洗效果良好。
关键字:清洗机器人;风压吸附;齿轮机构;刷洗
Design of Automatic Wall Cleaning Machine
Abstract:In recent years, with the development of society, more and more floors, with glass curtain wall building more and more to avoid cleaning a very important issue, most of the traditional way of artificial, or a cable from the top of the building will be used under the robotic crane, low efficiency, high-risk, then cleaned with a wall-climbing robot came into being, this task is to design a walk on the adsorption to the wall climbing robot for cleaning. This paper briefly wall-climbing robot based on the research status, based on 2D software, CAD, four-wheel vacuum on wall-climbing robot body bodies were designed, carried out on some key satisfied with the design calculation and checking terms, focusing on the mobile climbing robot structure, adsorption structure and drive system design and calculation. This designed wall-climbing robot car with four-wheel-type shape of the structure, simple structure;By pressure adsorption,robot using the pressure generated by the propeller on the compressed air pressure in the surface,avoiding the clear limitations of the robot on the wall,reducing the difficulty of control;Washing machine is suspended by a servo system, cleaning host and consists of computer control system;The cleaning of the unmanned, automatic cleaning, automatic water supply for automatic washing liquid, single chip control system, operating only through the keyboard to manipulate the work of the washing machine in the cleaning process, the washing machine to automatic edge recognition, according tothe building floor wash for vertical or horizontal wash;Rear-wheel drive, a motor to drive the two rear wheels, rear wheel drive the front wheels to complete the robot to walk, use of the spur gear transmission device as reducer;Roof supply; robot walk a straight line can be horizontal or vertical surface. The higher the cleaning efficiency of the machine a good cleaning effect.
Key words: Cleaning Robot;Pressure Adsorption Mode; Gear mechanism; Scrub;
目 录
摘要………………………………………………………………………………………1
关键词……………………………………………………………………………………1
1前言……………………………………………………………………………………2
1.1 课题研究的目的和意义……………………………………………………………2
1.2 课题研究现状及分析………………………………………………………………2
1.2.1 国外壁面清洗机器人研究现状…………………………………………………2
1.2.2 国内壁面清洗机器人研究现状…………………………………………………3
1.3 高层建筑外墙清洗机发展趋势……………………………………………………4
2清洗机器人总体方案设计……………………………………………………………5
2.1 对楼顶楼面的实际考察……………………………………………………………5
2.1.1楼面结构考察……………………………………………………………………5
2.1.2 楼顶的实际考察…………………………………………………………………5
2.2 清洗机器人的总体方案……………………………………………………………5
2.3 清洗机器人清洗系统方案…………………………………………………………6
2.4 清洗机器人爬壁系统方案…………………………………………………………7
2.5 清洗机器人控制系统方案…………………………………………………………7
2.5.1设计的基本原则…………………………………………………………………7
3 清洗机器人清洗系统设计……………………………………………………………8
3.1 清洗机器刷洗部分设计……………………………………………………………8
3.1.1 盘刷设计…………………………………………………………………………8
3.1.2 滚刷设计…………………………………………………………………………9
3.1.3刷洗部分所用弹簧的设计………………………………………………………10
3.2 内空心轴设计………………………………………………………………………11
3.3 清洗机主机滚轮的设计计算………………………………………………………11
3.4 主机上传感器及行程开关的选择…………………………………………………12
3.5复合缆的结构设计…………………………………………………………………12
4 清洗机器人风压系统设计……………………………………………………………13
4.1 采用风压的意义……………………………………………………………………13
4.2 基本原理……………………………………………………………………………13
4.3 气动计算的原始数据与技术要求…………………………………………………13
4.4 风压部分力学计算…………………………………………………………………14
5 清洗机器人主要零件设计……………………………………………………………15
5.1 直齿轮副的设计计算………………………………………………………………15
5.1.1 齿轮的设计计算及强度校核……………………………………………………15
5.1.2 齿面接触疲劳强度计算…………………………………………………………17
5.1.3 齿根抗弯疲劳强度验算…………………………………………………………19
5.1.4 齿面静强度计算…………………………………………………………………20
5.1.5 齿根(抗弯)静强度验算………………………………………………………20
5.2 锥齿轮副的设计计算………………………………………………………………21
5.2.1 基础尺寸确定……………………………………………………………………21
5.2.2 确定载荷系数K…………………………………………………………………22
5.2.3 齿面接触疲劳强度计算…………………………………………………………22
5.2.4 齿根抗弯疲劳强度计算…………………………………………………………23
5结论……………………………………………………………………………………24
参考文献 ………………………………………………………………………………24
致谢………………………………………………………………………………………26