设计简介
摘 要
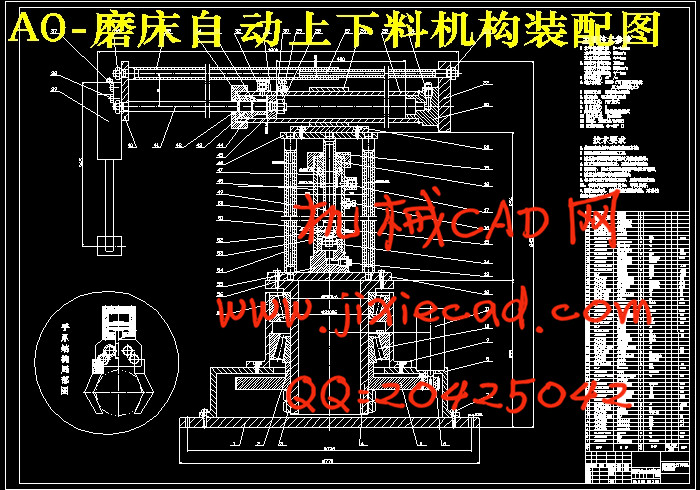
自动送料机构是工业机器人系统中传统的任务执行机构,是机器人的关键部件之一。自动送料机构的机械结构采用滚珠丝杆、滑杆、等机械器件组成;电气方面有交流 电机、变频器、传感器、等电子器件组成。该装置涵盖了可编程控制技术,位置 控制技术、检测技术等,是机电一体化的典型代表仪器之一。本文介绍的自动送料机构 是由 PLC 输出三路脉冲,分别驱动横轴、竖轴变频器,控制自动送料机构横轴和竖轴的 精确定位,微动开关将位置信号传给 PLC 主机;位置信号由接近开关反馈给 PLC 主机,通过交流电机的正反转来控制自动送料机构手爪的张合,从而实现自动送料机构精确运 动的功能。本课题拟开发的物料搬运自动送料机构可在空间抓放物体,动作灵活多样, 可代替人工在高温和危险的作业区进行作业,并可根据工件的变化及运动流程的 要求随时更改相关参数。关键词:自动送料机构,交流电机
Abstract
Manipulator industrial robot systems traditional mandate, Robot is one of the key components. Manipulator using the mechanical structure of screw-ball, slider, and other mechanical devices composition; Electric have AC motor, inverter, sensor, and other electronic device components. The device covers a programmable control technology, position control technology, detection technology, Mechatronics is a typical representative of one of the machines. This paper presents a manipulator by three PLC output pulse, driving horizontal, the vertical axis transducer, control manipulator axis horizontal and vertical positioning precision,micro-switches position signal transmission will host PLC; location close to the switching signal from the feedback from the mainframe to the PLC, through the exchange of Motor reversion to control the manipulator gripper Zhang, thus achieving accurate manipulator movement functions. The topics to be developed by the Manipulator grasping be up in space objects, movements flexible, diverse, can replace the artificial heat and dangerous operation conducted operations, According to the workpiece can change the campaign process and the requirements of any changes to the relevant parameters.
Key Words: Manipulator, AC motor
目 录
摘 要 IAbstract II
目 录 III
1 绪论 5
1.1 机器人 5
1.2 自动送料机构 6
1.2.1 自动送料机构的组成 6
1.2.2 自动送料机构的应用 7
1.2.3 自动送料机构的分类 7
1.3 课题研究内容及解决手段 8
1.4 课题研究意义 8
2 自动送料机构的结构方案和驱动方案选型 9
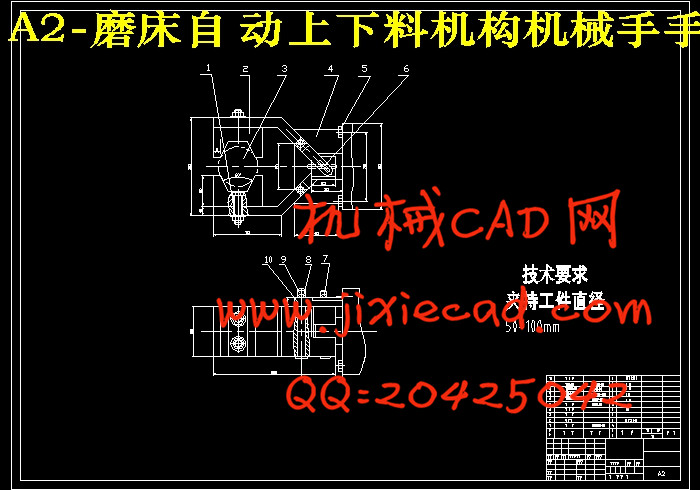
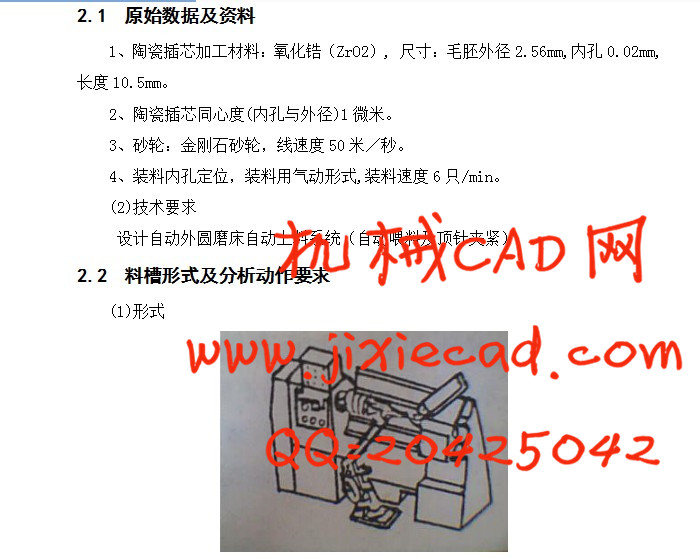
2.1 原始数据及资料 9
2.2 料槽形式及分析动作要求 9
2.3 自动送料机构结构及驱动系统选型 10
3 系统各主要组成部分设计 12
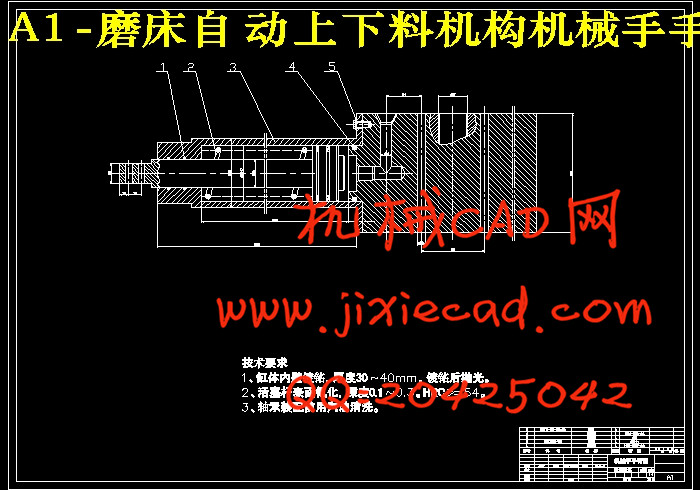
3.1 抓取机构设计 12
3.1.1 手部设计计算 12
3.1.2 腕部设计计算 16
3.2 液压驱动系统设计 19
3.2.1 手部抓取缸 20
3.2.2 腕部摆动液压回路 21
3.2.3 小臂伸缩缸液压回路 22
3.2.4 总体系统图 23
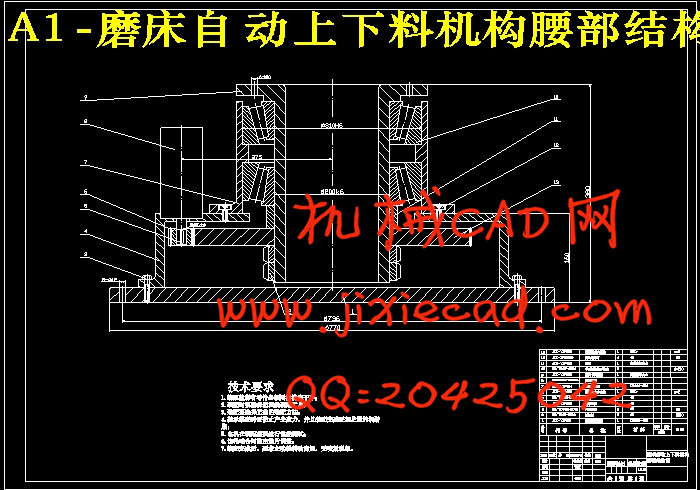
3.3 机身结构的设计 24
3.3.1 电机的选择 25
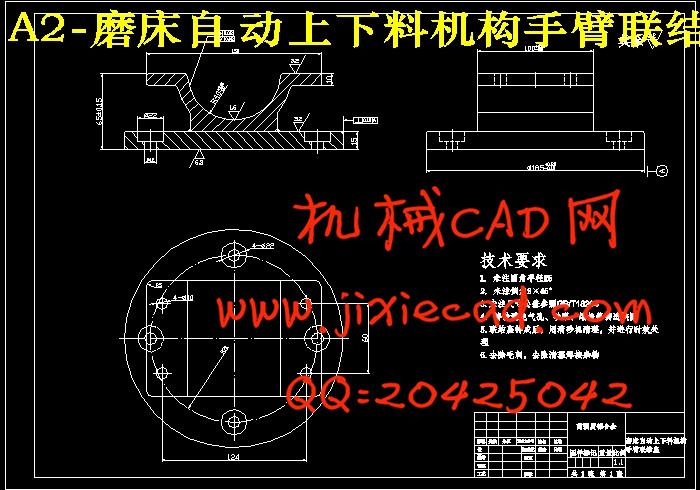
3.3.4 机座的机械结构示意图 28
3.4 自动送料机构的定位及平稳性确定 29
3.4.1 常用的定位方式 29
3.4.2 影响平稳性和定位精度的因素 29
3.4.3 自动送料机构运动的缓冲装置 30
结论语 32
致 谢 33
参 考 文 献 34