设计简介
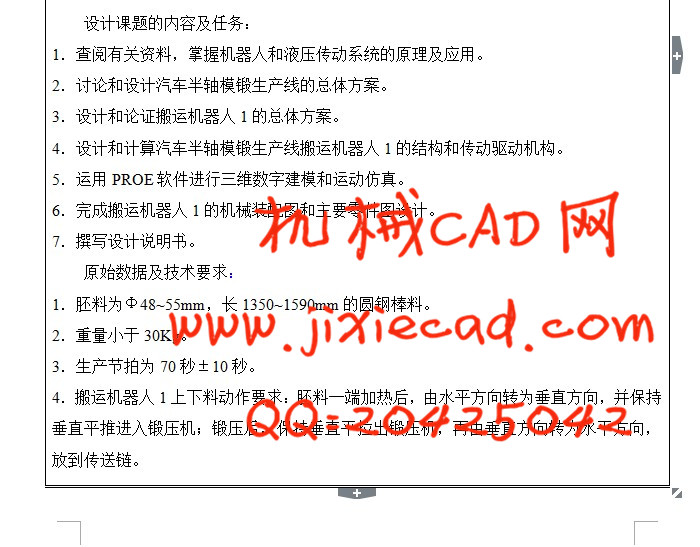
汽车半轴是汽车传动系统中重要的传载件,随着汽车工业飞速的发展,同时为了降低汽车半轴模锻生产时工人的劳动强度以及提高生产效率。针对这些设计了搬运机器人,该机器人是由液压系统驱动的,它由底座、液压缸,手臂,手爪组成。这个搬运机器人的结构设计主要包括:液压缸的选型、手臂的结构设计、手抓的结构设计以及连接手臂、手抓之间联接件的设计。在此基础上运用了CAD完成了二维装配图、局部装配图和零件图的绘制,并运用PRO/ENGINEER构造了整个搬运机器人的三维装配模型和各个部件的三维模型。可没能进一步地实现三维模型的运动仿真。
关键词 汽车半轴 搬运机器人 机械结构设计 三维建模
Abstract
The automotive semiaxle are important part in automotive drive system,with the rapid development of automobile industry ,and in order to reduce labor intensity and improve production efficiency. so carrying robot are designed, it is driven by the hydraulic system. It is the romposition of the base、hydraulic cylinder、arm、grasping. The carrying robot mainly include: selection of hydraulic cylinder 、the structural design of the arm and grasping ,the connection between arm and grasping. On this basis ,having completed a two-dimensional assembly drawing 、 partial assembly drawing and part drawing by cad. At the same time , Constructed the carrying robot 3D assembly model with PREO, But ,failed to further complete the robot simulation
Keywords automotive semiaxle carrying robot mechanical structure design three-dimensional modeling
目 录
1 引言 1
1.1 汽车半轴模锻的发展 1
1.2 搬运机器人 1
2 总体设计方案 4
2.1 搬运机器人 4
2.2 机器人自由度和驱动方式的确定 6
3 机器人的结构设计 7
3.1 机器人受力分析和计算 7
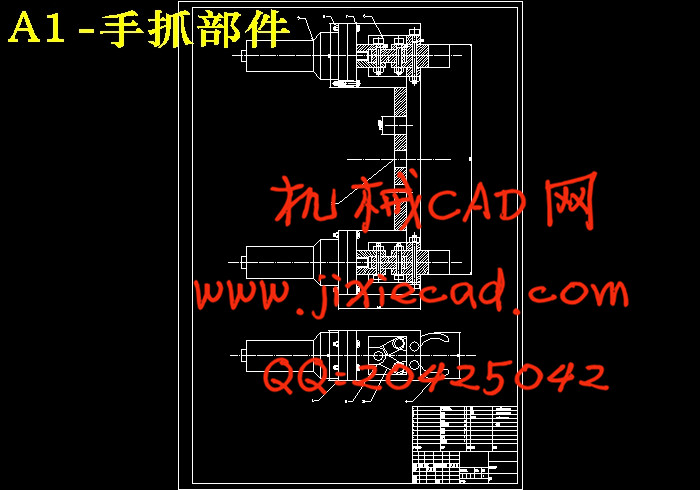
3.2 手抓部件的结构设计 11
3.3 手抓液压缸的选型 13
3.4 手臂部件的结构设计 17
3.5 手臂液压缸的选择 20
3.6 手臂的三维效果图 20
3.7 摆动液压缸的选型 22
3.8 底座部件的结构设计 25
3.9 机器人的三维模型 26
结论 28
致谢 29
参 考 文 献 30
关键词 汽车半轴 搬运机器人 机械结构设计 三维建模
Abstract
The automotive semiaxle are important part in automotive drive system,with the rapid development of automobile industry ,and in order to reduce labor intensity and improve production efficiency. so carrying robot are designed, it is driven by the hydraulic system. It is the romposition of the base、hydraulic cylinder、arm、grasping. The carrying robot mainly include: selection of hydraulic cylinder 、the structural design of the arm and grasping ,the connection between arm and grasping. On this basis ,having completed a two-dimensional assembly drawing 、 partial assembly drawing and part drawing by cad. At the same time , Constructed the carrying robot 3D assembly model with PREO, But ,failed to further complete the robot simulation
Keywords automotive semiaxle carrying robot mechanical structure design three-dimensional modeling
目 录
1 引言 1
1.1 汽车半轴模锻的发展 1
1.2 搬运机器人 1
2 总体设计方案 4
2.1 搬运机器人 4
2.2 机器人自由度和驱动方式的确定 6
3 机器人的结构设计 7
3.1 机器人受力分析和计算 7
3.2 手抓部件的结构设计 11
3.3 手抓液压缸的选型 13
3.4 手臂部件的结构设计 17
3.5 手臂液压缸的选择 20
3.6 手臂的三维效果图 20
3.7 摆动液压缸的选型 22
3.8 底座部件的结构设计 25
3.9 机器人的三维模型 26
结论 28
致谢 29
参 考 文 献 30