设计简介
摘要
自动化立体仓库目前广泛应用于汽车、电子、医药、烟草、建材、邮电等许多行业,是实现物流系统合理化的关键,对加快物流速度、提高劳动生产率、降低生产成本都有重要意义。其中堆垛机又是自动化立体仓库中最重要的搬运、起重、堆垛设备, 对立体仓库的出入库效率有重要影响。本文将注重研究双伸位堆垛机,它的使用不仅减少巷道占地,而且还减少了堆垛机台数。在相同面积条件下,大幅度提高了地面利用率和存取工作效率,同时能够为用户节约可观的投资。由于双伸位堆垛机的这个独特优势,它已得到迅速推广,并具有很大的市场空间。但与国外技术相比,目前我国堆垛机产品在技术参数、产品覆盖范围、技术稳定性和产业规模等方面均有差距。因此,本设计课题将从堆垛机的最主要的部分——货叉展开研究,希望能进一步的提高堆垛机的工作效率及使用寿命。
双伸位堆垛机采用了多级双伸位货叉,通过行程倍增实行大距离伸出,实现巷道内单边双排货架存取货物,但由于货叉悬臂加长,导致力矩相应增加,控制货叉的下挠量成为技术关键,同时也是技术难题。
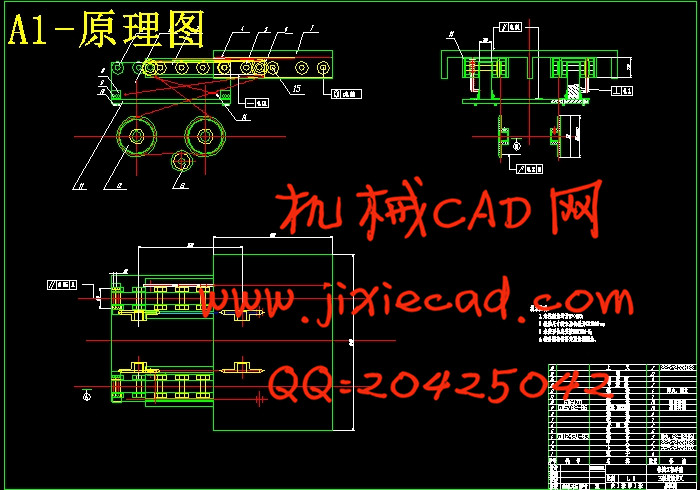
堆垛机伸缩货叉采用一种能使原动机动作行程增倍的双向驱动直线运动机构。为此,在方案设计中选择链条链轮组成的传动机构。根据货叉存物取货的双向伸缩行程要求,仅采用双层货叉行程增倍机构是不够的,还必须实现第3层货叉的行程增倍直线差动。但由于货叉悬臂加长,导致力矩相应增加,因此需要通过严格的理论计算和实际中的经验来控制货叉的下挠量。
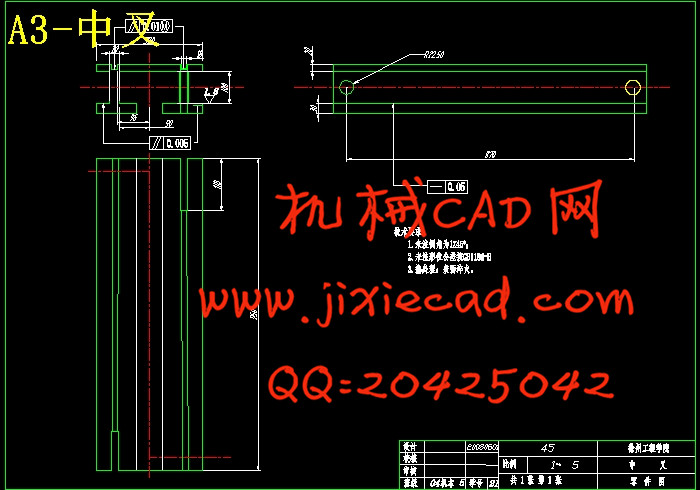
在这次设计过程中,将使用Pro/E建模,并进行运动仿真,其中主要建模的零件包括链轮、链条、齿轮、齿条、下叉、中叉、上叉等。难点在于各尺寸的确定及配合,和链传动的运动仿真。
关键词:货叉;Pro/E;挠性;仿真
Abstract
Automated Warehouse now widely have been used in automotive, electronic, pharmaceutical, tobacco, building materials, telecommunications and other industries,it is to achieve rationalization of the key logistics system, to accelerate the pace of logistics, improve labor productivity, lower production costs have important significance. One stacker warehouse automation is the most important of handling, lifting and stacking equipment, for the three-dimensional warehouse to have an important impact on the efficiency of storage, the paper will focus on extending double-stacker, which not only reduce the use of roadway Land, but also reduce the number of stacking machine, under the conditions in the same area, a substantial increase access and utilization of the ground work efficiency, while users can save considerable investment. Because of this unique advantage of the extended-stacker, it has been the rapid promotion, and has great market space. However, compared with foreign technology, China's Stacker products in the technical parameters, product coverage, technology steadily and technology industries in scale of the gap. Therefore, this issue will design the most important part - Fork study, hoping to further improve the efficiency of Stacker and life.
Two-side-stacker adopted the multi-level two-side-Fork, through the implementation of the gap doubled to achieve within the roadway unilateral double shelf access of goods, but because fork cantilever longer, resulting in a corresponding increase in torque , under the control Fork torsion is not only a key technology, but also technical difficulties.
Stacker telescopic Fork can adopt a program of action motivated by two-way drive times the linear motion agencies, to that end, in program design in the choice of the sprocket chain drive mechanism. According Fork of the pickup of two-way telescopic trip request, only a double-decker Fork journey times by institutions is not enough, we must also achieve the three-tier Fork trip times by linear differential. However, due to Fork cantilever longer, resulting in a corresponding increase in torque, it needs a rigorous theoretical and practical experience to the next control Fork of torsion.
In the design process, it is using Pro / E modeling and simulation exercise, which mainly include the sprocket parts modeling, the chain, gears, rack, under the higher, middle, lower fork and so on, the difficulty lies in Identify and cope with the size, and chain drive the simulation.
Key words: Fork Pro / E Flexible Simulation
自动化立体仓库目前广泛应用于汽车、电子、医药、烟草、建材、邮电等许多行业,是实现物流系统合理化的关键,对加快物流速度、提高劳动生产率、降低生产成本都有重要意义。其中堆垛机又是自动化立体仓库中最重要的搬运、起重、堆垛设备, 对立体仓库的出入库效率有重要影响。本文将注重研究双伸位堆垛机,它的使用不仅减少巷道占地,而且还减少了堆垛机台数。在相同面积条件下,大幅度提高了地面利用率和存取工作效率,同时能够为用户节约可观的投资。由于双伸位堆垛机的这个独特优势,它已得到迅速推广,并具有很大的市场空间。但与国外技术相比,目前我国堆垛机产品在技术参数、产品覆盖范围、技术稳定性和产业规模等方面均有差距。因此,本设计课题将从堆垛机的最主要的部分——货叉展开研究,希望能进一步的提高堆垛机的工作效率及使用寿命。
双伸位堆垛机采用了多级双伸位货叉,通过行程倍增实行大距离伸出,实现巷道内单边双排货架存取货物,但由于货叉悬臂加长,导致力矩相应增加,控制货叉的下挠量成为技术关键,同时也是技术难题。
堆垛机伸缩货叉采用一种能使原动机动作行程增倍的双向驱动直线运动机构。为此,在方案设计中选择链条链轮组成的传动机构。根据货叉存物取货的双向伸缩行程要求,仅采用双层货叉行程增倍机构是不够的,还必须实现第3层货叉的行程增倍直线差动。但由于货叉悬臂加长,导致力矩相应增加,因此需要通过严格的理论计算和实际中的经验来控制货叉的下挠量。
在这次设计过程中,将使用Pro/E建模,并进行运动仿真,其中主要建模的零件包括链轮、链条、齿轮、齿条、下叉、中叉、上叉等。难点在于各尺寸的确定及配合,和链传动的运动仿真。
关键词:货叉;Pro/E;挠性;仿真
Abstract
Automated Warehouse now widely have been used in automotive, electronic, pharmaceutical, tobacco, building materials, telecommunications and other industries,it is to achieve rationalization of the key logistics system, to accelerate the pace of logistics, improve labor productivity, lower production costs have important significance. One stacker warehouse automation is the most important of handling, lifting and stacking equipment, for the three-dimensional warehouse to have an important impact on the efficiency of storage, the paper will focus on extending double-stacker, which not only reduce the use of roadway Land, but also reduce the number of stacking machine, under the conditions in the same area, a substantial increase access and utilization of the ground work efficiency, while users can save considerable investment. Because of this unique advantage of the extended-stacker, it has been the rapid promotion, and has great market space. However, compared with foreign technology, China's Stacker products in the technical parameters, product coverage, technology steadily and technology industries in scale of the gap. Therefore, this issue will design the most important part - Fork study, hoping to further improve the efficiency of Stacker and life.
Two-side-stacker adopted the multi-level two-side-Fork, through the implementation of the gap doubled to achieve within the roadway unilateral double shelf access of goods, but because fork cantilever longer, resulting in a corresponding increase in torque , under the control Fork torsion is not only a key technology, but also technical difficulties.
Stacker telescopic Fork can adopt a program of action motivated by two-way drive times the linear motion agencies, to that end, in program design in the choice of the sprocket chain drive mechanism. According Fork of the pickup of two-way telescopic trip request, only a double-decker Fork journey times by institutions is not enough, we must also achieve the three-tier Fork trip times by linear differential. However, due to Fork cantilever longer, resulting in a corresponding increase in torque, it needs a rigorous theoretical and practical experience to the next control Fork of torsion.
In the design process, it is using Pro / E modeling and simulation exercise, which mainly include the sprocket parts modeling, the chain, gears, rack, under the higher, middle, lower fork and so on, the difficulty lies in Identify and cope with the size, and chain drive the simulation.
Key words: Fork Pro / E Flexible Simulation
目 录
1.绪论 1
1.1自动化立体仓库在国民经济中的重要地位及堆垛机的意义 1
1.1.1自动化立体仓库 1
1.1.2自动化立体仓库的重要地位 1
1.1.3有轨巷道堆垛机的意义 2
1.2课题研究的目的及意义 3
1.3堆垛机及货叉的技术要求,研究内容 3
2.自动化立体仓库设计 5
2.1自动化立体仓库总体规划时需要考虑的问题 5
2.2自动化立体仓库总体规划 6
2.2.1高层货架 6
2.2.2巷道堆垛机 6
2.2.3输送系统 6
2.2.4托盘(货箱) 6
2.2.5自动控制系统 7
2.2.6库存信息管理系统 7
2.3巷道堆垛机设计 7
2.3.1设计思路 7
2.3.2 控制系统结构 10
2.3.3 速度控制 11
2.3.4 位置确定 11
3.货叉方案设计 13
3.1液压传动 13
3.1.1双杆活塞缸 13
3.2机械传动 15
3.2.1链传动 15
3.2.2齿轮齿条传动 15
4.零件设计 18
4.1电动机、减速器的选择 18
4.1.1电动机的选择 18
4.1.2减速器的选择 19
4.2货叉的力学计算 21
4.2.1货叉弯矩的计算 21
4.2.2堆垛机货叉强度的计算 22
4.2.3货叉变形计算 23
4.3链轮链条传动计算 26
4.3.1链传动的优缺点 26
4.3.2链条链轮的确定 27
4.4单个螺栓联接的受力分析和强度计算 30
4.4.1货叉没展开时 30
4.4.2货叉展开时(极限位置) 31
5 零件建模仿真 35
5.1Pro/E零件建模仿真 35
5.1.1螺栓的设计过程 35
5.1.2螺母制作过程 38
5.2链条链轮的设计过程 39
5.3零件的装配 40
5.4链传动及总装图 42
6. NC代码 44
6.1NC代码简介 44
6.2.中叉上的链条槽 44
6.3.中叉上的孔 52
结论 56
致谢 57
参考文献 58