设计简介
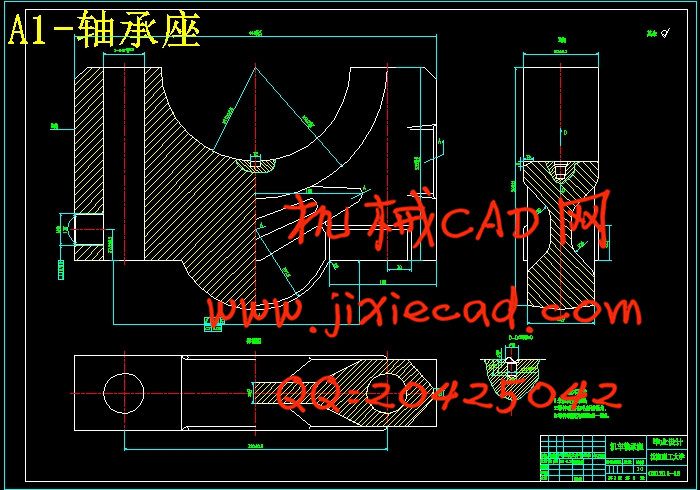
该装置是机车轴承座自动生产线上的辅助装置之一,主要完成抓取工件,提升一定高度,旋转,移位,松开工件等几个基本功能。
其主要技术指标如下:
1. 工件重量约为70Kg;
2. 工件最大尺寸(长,宽,高):440×92×290(具体见零件图);
3. 最大操作范围:提升高度为70mm,转动角度为90°,水平移动为400mm;
4. 机械手的自由度数为3(上升,转动,平移);
5.定位精度:属于上下料机构,本身精度要求不高;
6.装料高度:1050mm;
7.性能要求:抓取可靠、灵活,松放平稳,定位可靠。
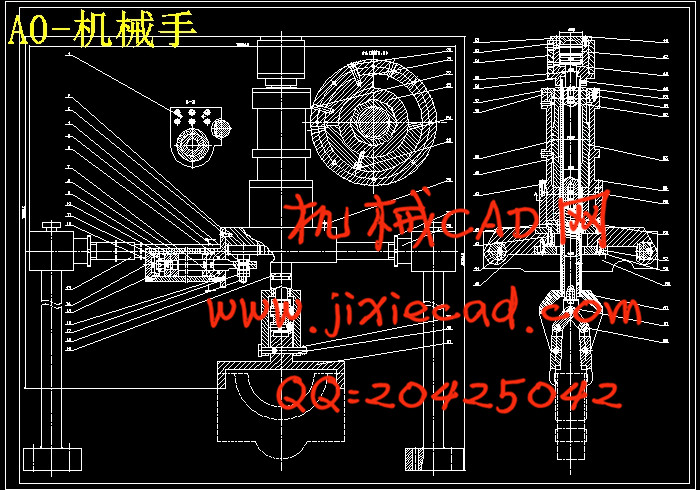
在满足上述各项功能的前提下,我们尽量采用结构简单,制造方便的零部件来组成该机车轴承座的自动上下料专用机构即机械手。根据机械手所要实现的基本功能,我们采用圆柱坐标式机械手。其手臂的运动系由两个直线运动和一个回转运动所组成,即沿X轴的平移、沿Z轴的升降和绕Z轴的回转,而手部的夹放动作不能改变工件的位置和方位,故它不计为自由度数,因此该机械手具有三个自由度数即可满足使用要求。
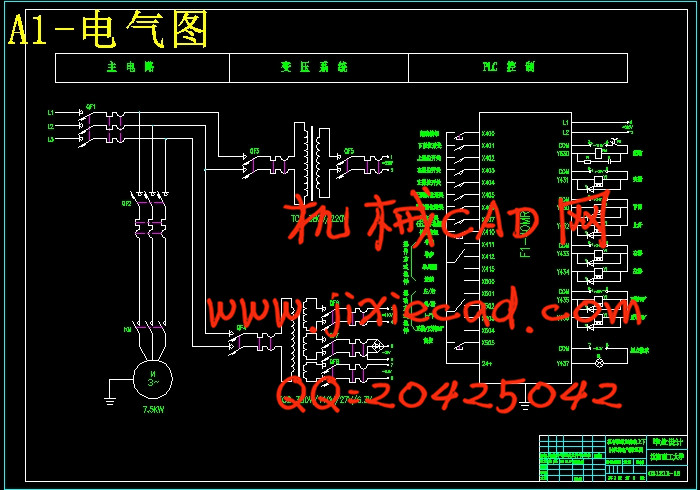
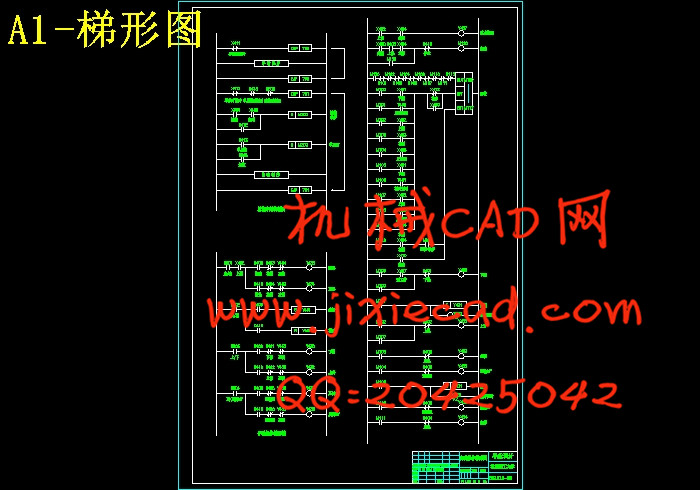
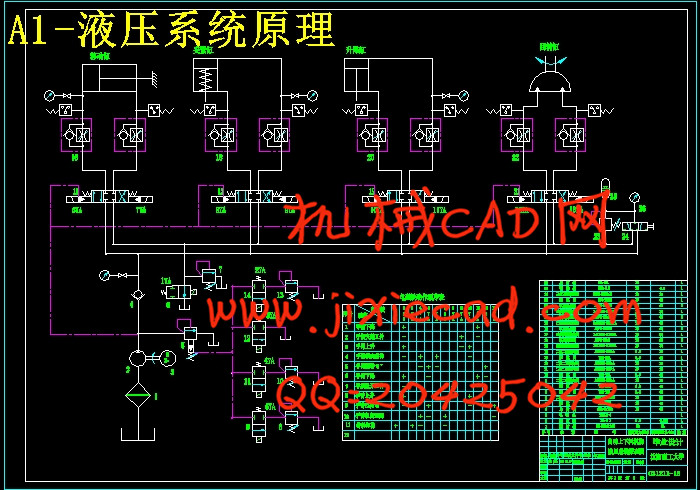
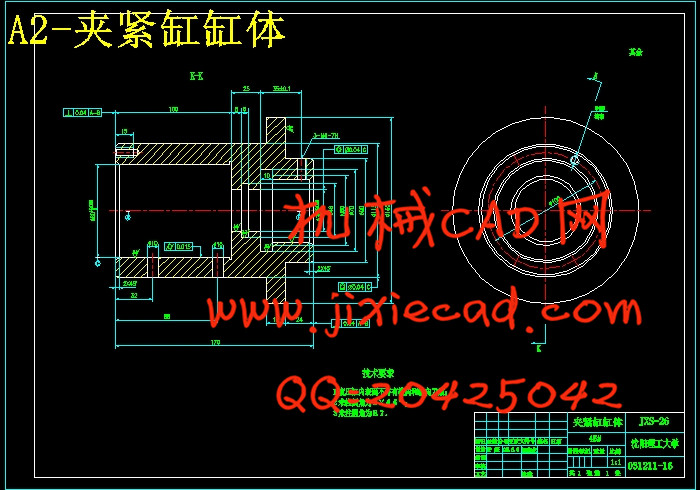
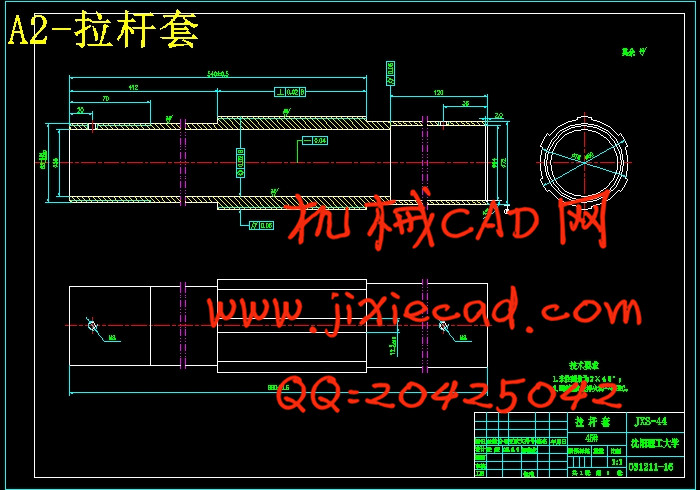
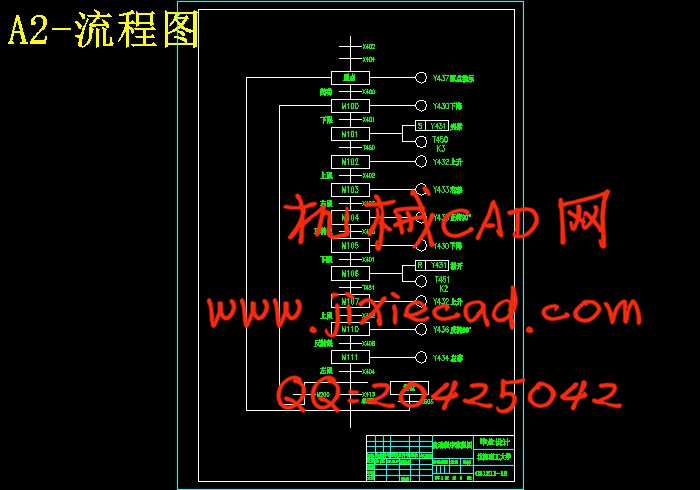
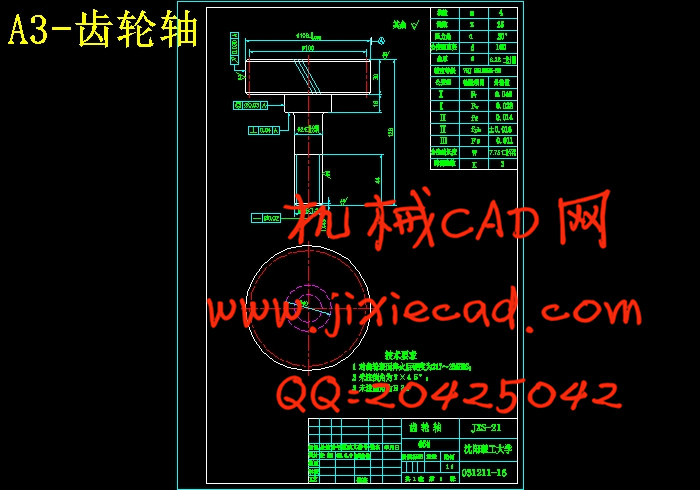
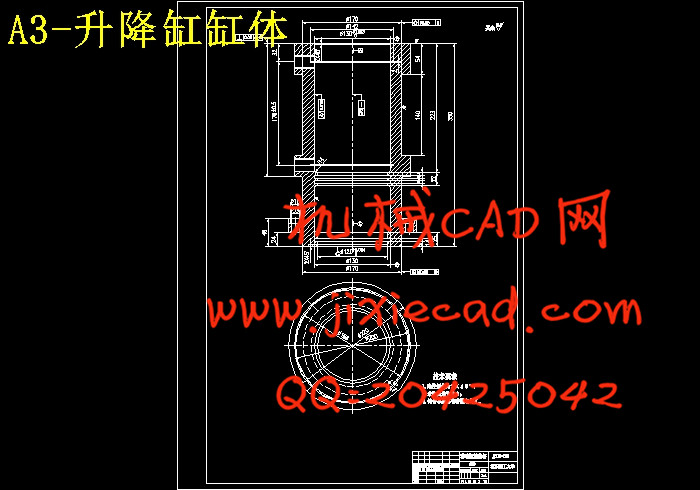
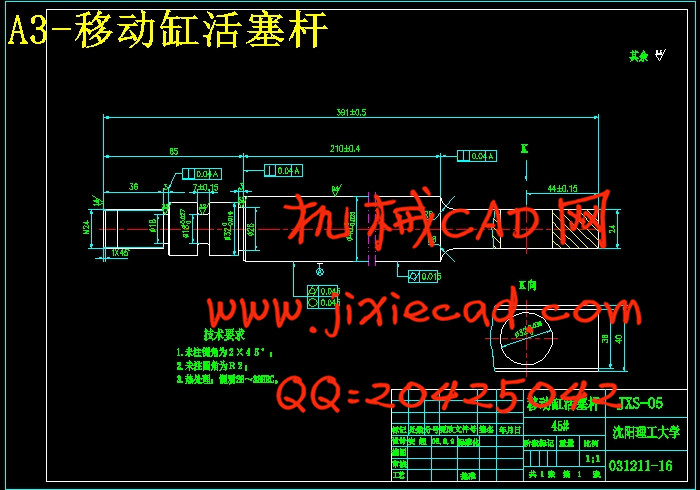
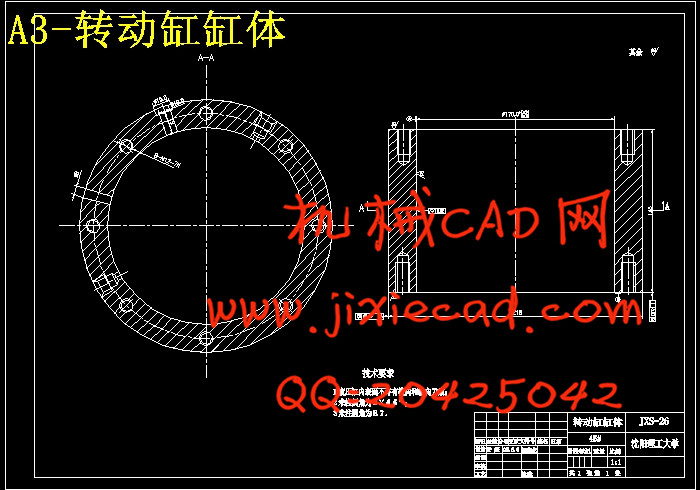
根据实际需要我们选用液压传动机械手:以油液的压力来驱动执行机构运动。其主要特点是:抓重可达几百公斤以上、传动平稳、结构紧凑、动作灵敏。安排夹紧液压缸,升降液压缸,回转液压缸和移动液压缸来分别实现夹紧松开、升降、转动和平移各项功能。为了实现对机械手的各个动作的顺序控制,我们采用PLC控制各动作的执行元件。
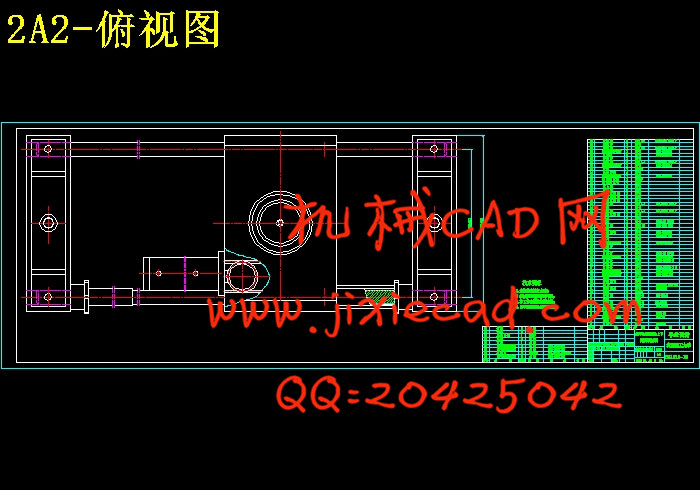
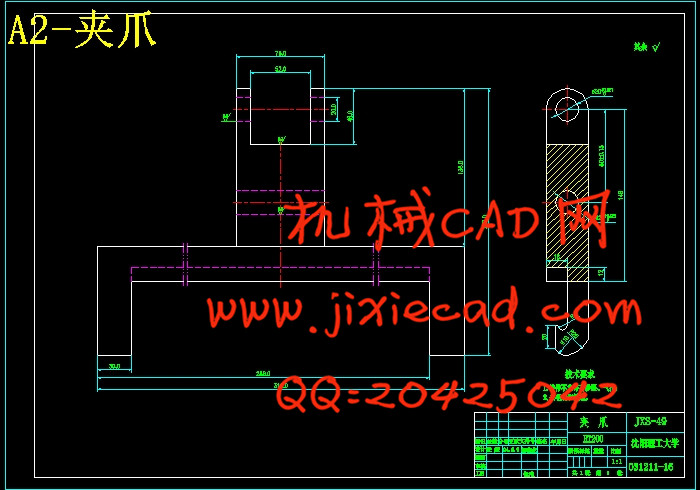
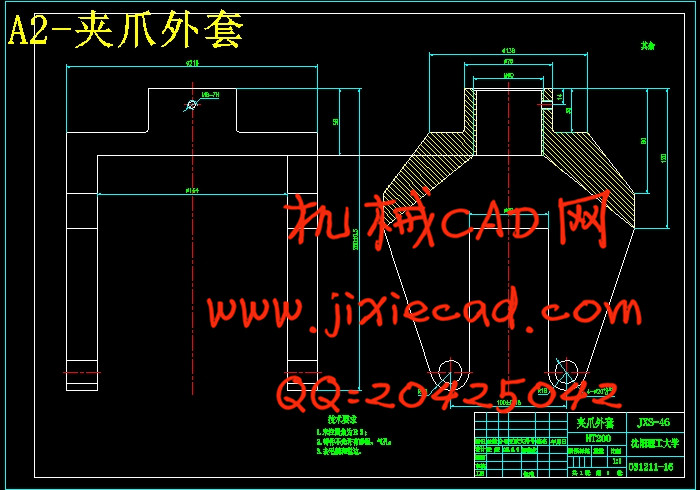
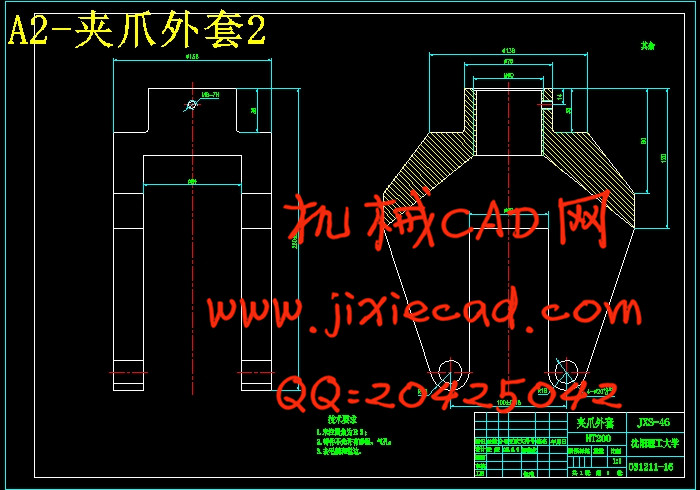
该机械手的具体结构为:使用两个立柱作为支撑架,在支架上钻两个孔,把装有滑板及连接板和平移液压缸的导轨装于支架的孔里,采用螺钉进行紧固。滑板上装有由升降缸和回转缸组成的臂部及手指式手部和驱动手部夹紧、松开的夹紧液压缸。滑板带动工件一起移动实现平移,移动液压缸与滑板的运动可以由齿轮与齿条的传动来实现。
其主要技术指标如下:
1. 工件重量约为70Kg;
2. 工件最大尺寸(长,宽,高):440×92×290(具体见零件图);
3. 最大操作范围:提升高度为70mm,转动角度为90°,水平移动为400mm;
4. 机械手的自由度数为3(上升,转动,平移);
5.定位精度:属于上下料机构,本身精度要求不高;
6.装料高度:1050mm;
7.性能要求:抓取可靠、灵活,松放平稳,定位可靠。
在满足上述各项功能的前提下,我们尽量采用结构简单,制造方便的零部件来组成该机车轴承座的自动上下料专用机构即机械手。根据机械手所要实现的基本功能,我们采用圆柱坐标式机械手。其手臂的运动系由两个直线运动和一个回转运动所组成,即沿X轴的平移、沿Z轴的升降和绕Z轴的回转,而手部的夹放动作不能改变工件的位置和方位,故它不计为自由度数,因此该机械手具有三个自由度数即可满足使用要求。
根据实际需要我们选用液压传动机械手:以油液的压力来驱动执行机构运动。其主要特点是:抓重可达几百公斤以上、传动平稳、结构紧凑、动作灵敏。安排夹紧液压缸,升降液压缸,回转液压缸和移动液压缸来分别实现夹紧松开、升降、转动和平移各项功能。为了实现对机械手的各个动作的顺序控制,我们采用PLC控制各动作的执行元件。
该机械手的具体结构为:使用两个立柱作为支撑架,在支架上钻两个孔,把装有滑板及连接板和平移液压缸的导轨装于支架的孔里,采用螺钉进行紧固。滑板上装有由升降缸和回转缸组成的臂部及手指式手部和驱动手部夹紧、松开的夹紧液压缸。滑板带动工件一起移动实现平移,移动液压缸与滑板的运动可以由齿轮与齿条的传动来实现。