设计简介
摘 要
康复机器人是康复设备的一种类型,同时作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域,已经成为了国际机器人领域的一个研究热点。康复医学工程虽然在我国得到了普遍的重视,但由于康复机器人研究尚处于起步阶段,一些简单康复器械目前还远远不能满足市场对智能化、人机工程化康复机器人的需求,因此有待进一步的研究和发展。
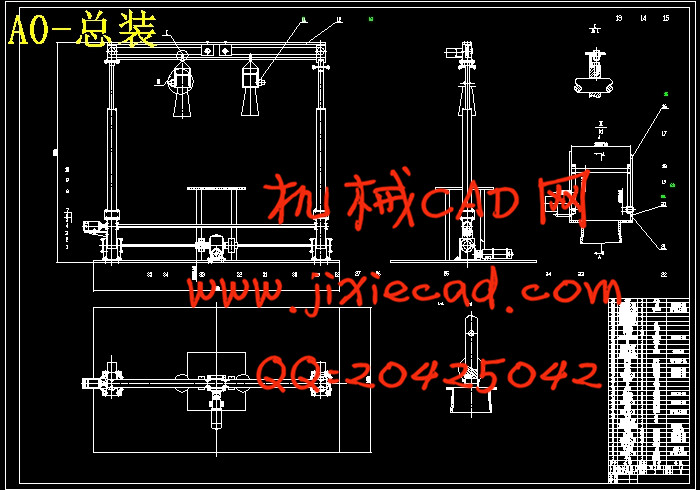
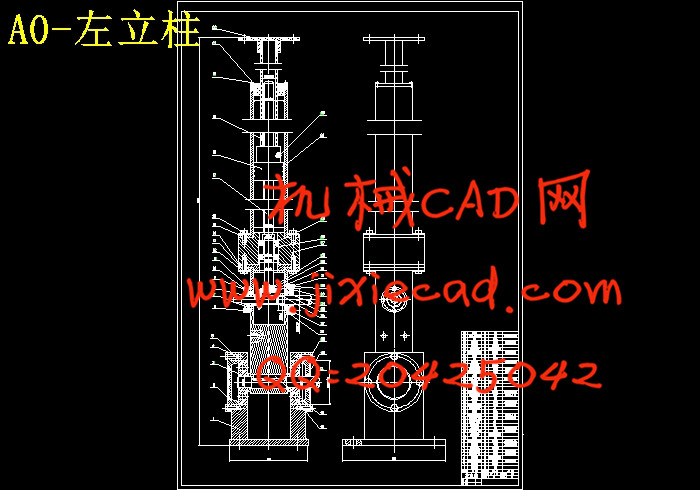
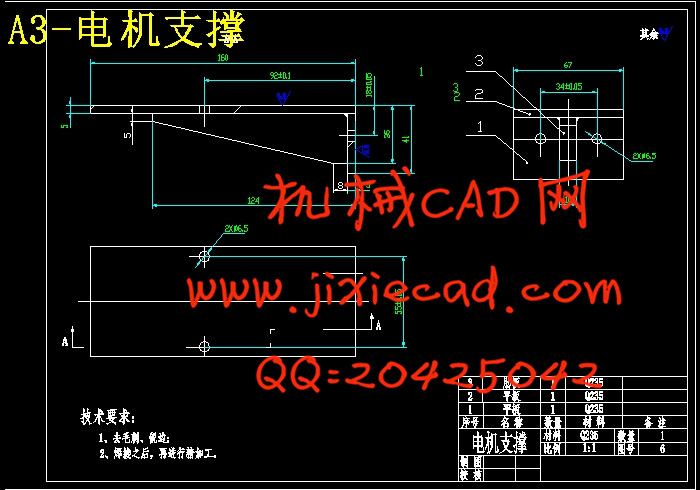
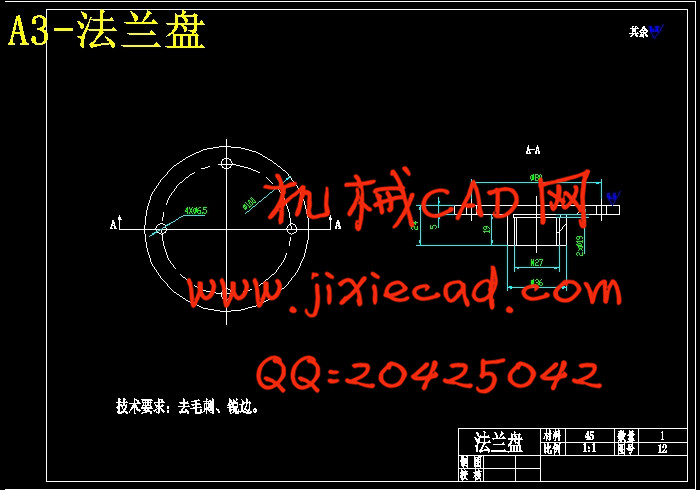
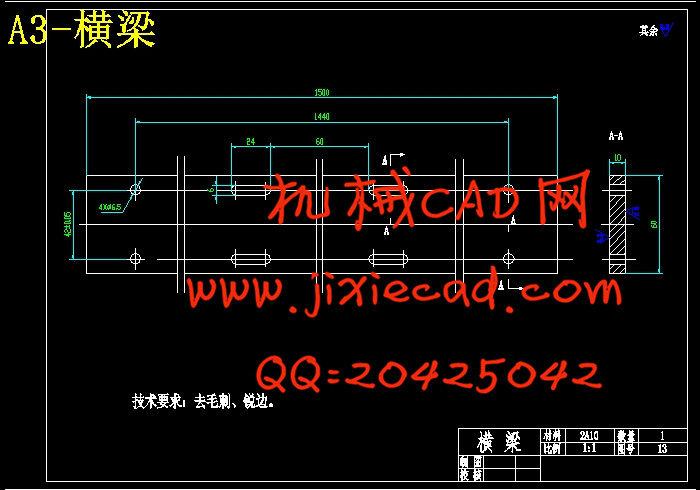
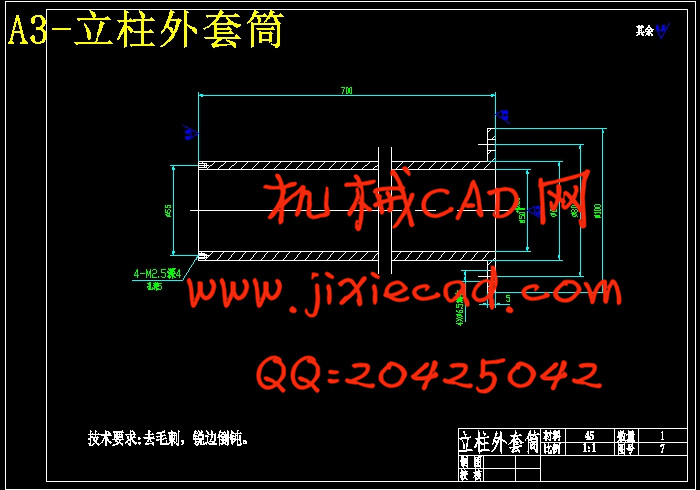
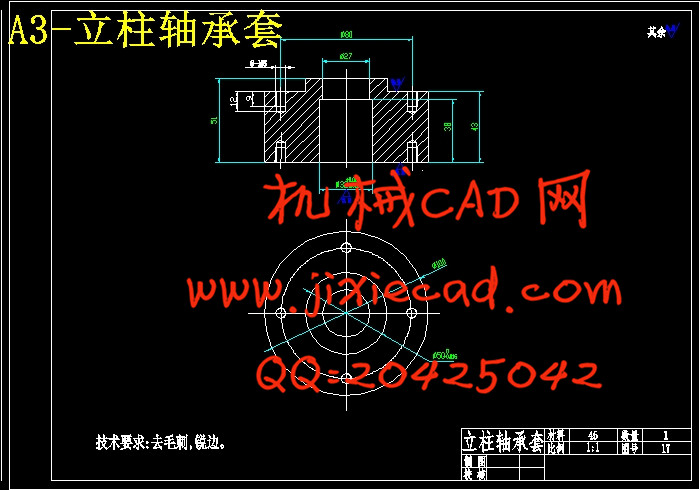
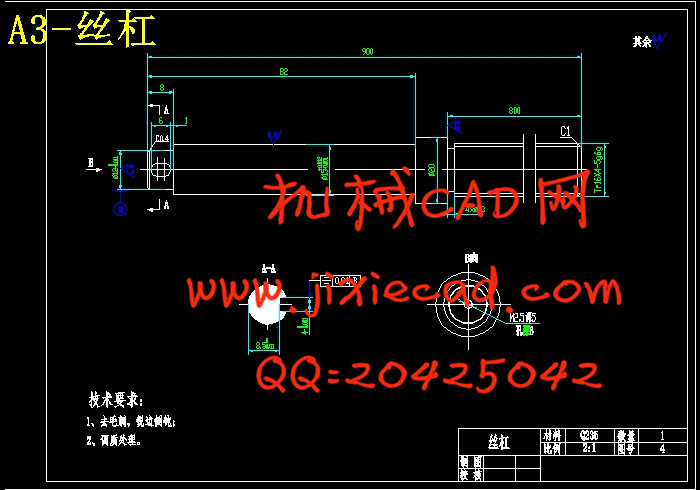
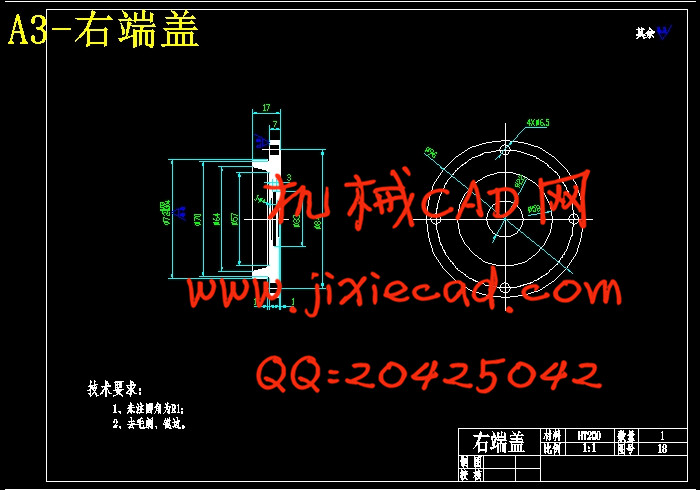
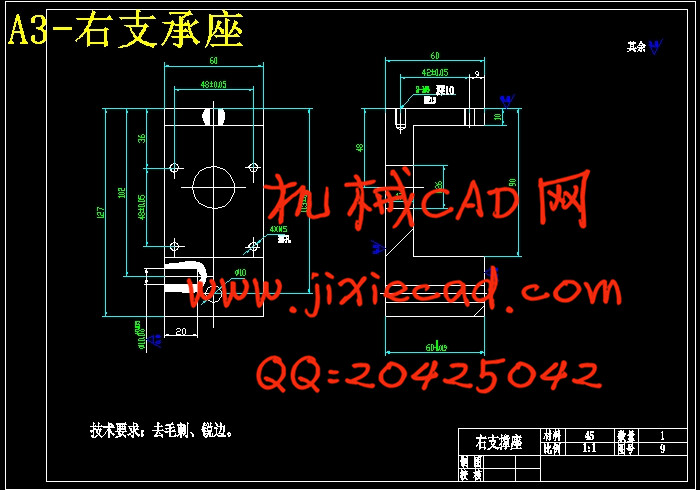
本文从使用角度分析了人体上肢运动原理,设计了一种坐式上肢康复训练机器人,用于心脑血管疾病或神经系统疾病造成的上肢体损伤患者的上肢康复训练。本设计中的上肢康复机器人主要由机身、运动机构和传动机构组成。机身包括放置于地面上的基座、两根可以伸缩的立柱以及上横梁;运动机构则由上肢前后摆动机构、上肢屈伸机构和上肢分合机构组成,它们分别装在机身的基座、立柱和横梁上,且分别由单独的电机和减速器驱动;传动机构主要包括传动轴、丝杠螺母副、同步齿形带等元件。该机器人在单片机的控制下,实现患者的上肢前后摆、屈伸、分合运动以及手腕转动的康复训练;也可启动部分电机,完成其中的部分康复训练。
随着机器人技术的发展,小型化、轻量化而且更接近实用的人工智能机器人不断地被开发研制出来,人们对康复机器人的未来也充满了期待。
关键词:上肢;康复机器人;结构设计;运动机构;传动机构
ABSTRACT
Rehabilitation robot is a type of rehabilitation facilities, and as an important branch of medical robots at the same time, it comes from the rehabilitation medicine, biomechanics, mechanics, mechanics of machinery, electronics, material science, computer science and robotics, and many other areas, and it has become a research hotspot in the field of international robot. Medical Engineering in our country has been received widespread attention though, and because of rehabilitation robotics still in its infancy, some simple rehabilitation equipment is far from meeting intelligence, ergonomics of the rehabilitation robot needs, so we still need to do some further research and development.
From the use of perspective, the upper limb movement principle of the human body is analyzed. And the seated upper extremity rehabilitation robot is designed for the cardiovascular diseases or diseases of the nervous system on the body damage in patients with upper limb rehabilitation training. The design of upper limb rehabilitation robot is mainly composed of the fuselage, the motion mechanism and the transmission mechanism. The fuselage includes the platform base, two scalable columns and a beam; The motion mechanism consists of the back and forth various agency, the flex movement agency, the lifting agency and the wrist rotation agency, respectively installed on the base of the fuselage, the stand column and the beam, and the every movement is driven by the separate drive motor and reducer; The transmission mechanism is composed of the transmission shaft, screw nut pair and elements such as synchronous cog belt. The upper limb’s pendulum, expand and the rotation of the wrist of patients are realized by the robot under the control of the MCU. Part of the rehabilitation training also can be started by motor.
With the development of robot technology, miniaturization, lightweight and more close to practical robot of artificial intelligence are constantly developed, and people is full of expectation to the future of the rehabilitation robot.
Key words:upper limb; rehabilitation robot; structural design; motion mechanism; transmission mechanism
目 录
第1章 绪论 1
1.1 本课题的目的与意义 1
1.2 康复机器人的国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 5
1.3 本课题主要研究内容 7
第2章 上肢康复机器人总体结构方案 8
2.1 总体方案设计 8
2.1.1 机器人整体尺寸的选择 8
2.1.2 机器人驱动装置的选择 8
2.1.3 机器人的总体方案 9
2.2 运动机构的总体设计 10
2.2.1 前后摆动机构 10
2.2.2 屈伸运动机构 10
2.2.3 分合运动机构 11
2.2.4 手腕转动机构 12
2.3本章小结 12
第3章 上肢康复机器人机械结构设计 13
3.1 前后摆动机构 13
3.1.1 电机的选择 13
3.1.2 减速器的选择 14
3.1.3 联轴器的选择 15
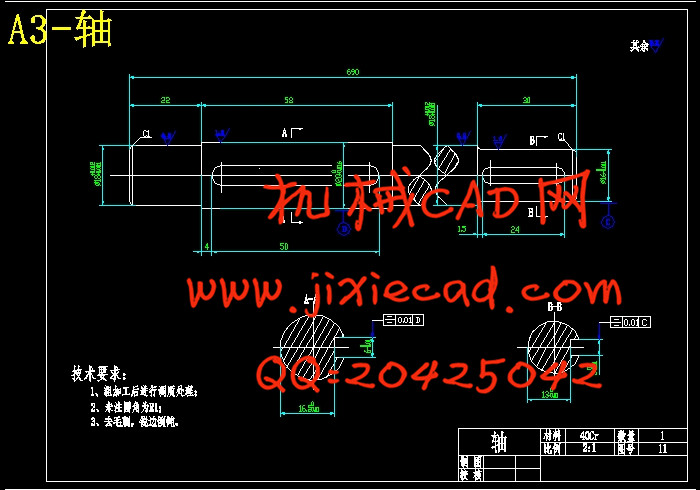
3.1.4 轴的设计与校核 16
3.1.5 键选择及校核计算 18
3.1.6 整体结构的设计 19
3.2 屈伸运动机构 20
3.2.1 电机的选择 20
3.2.2 联轴器的选择 21
3.2.3 丝杠的设计计算 21
3.2.4 锥齿轮的设计计算 23
3.2.5 轴承校核 25
3.2.6 总体结构的设计 26
3.3 分合运动机构 27
3.3.1 电机的选择 27
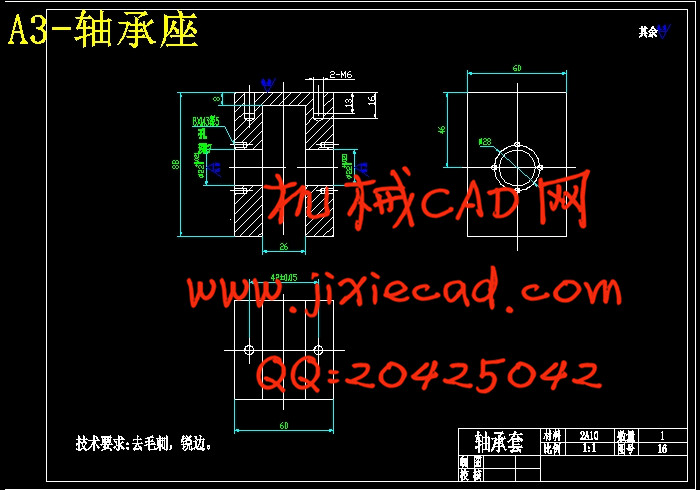
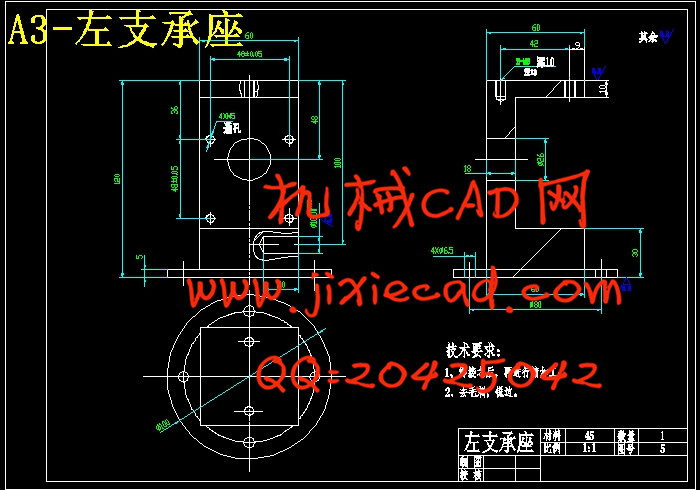
3.3.2 支撑座的设计 28
3.3.3 横梁的设计 29
3.3.4 同步齿形带设计 29
3.3.5 总体结构的设计 31
3.4 手腕转动机构 31
3.4.1 电机的选择 31
3.4.2 总体结构的设计 32
3.5 本章小结 33
第4章 总结 34
参考文献 35
致 谢 37
康复机器人是康复设备的一种类型,同时作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域,已经成为了国际机器人领域的一个研究热点。康复医学工程虽然在我国得到了普遍的重视,但由于康复机器人研究尚处于起步阶段,一些简单康复器械目前还远远不能满足市场对智能化、人机工程化康复机器人的需求,因此有待进一步的研究和发展。
本文从使用角度分析了人体上肢运动原理,设计了一种坐式上肢康复训练机器人,用于心脑血管疾病或神经系统疾病造成的上肢体损伤患者的上肢康复训练。本设计中的上肢康复机器人主要由机身、运动机构和传动机构组成。机身包括放置于地面上的基座、两根可以伸缩的立柱以及上横梁;运动机构则由上肢前后摆动机构、上肢屈伸机构和上肢分合机构组成,它们分别装在机身的基座、立柱和横梁上,且分别由单独的电机和减速器驱动;传动机构主要包括传动轴、丝杠螺母副、同步齿形带等元件。该机器人在单片机的控制下,实现患者的上肢前后摆、屈伸、分合运动以及手腕转动的康复训练;也可启动部分电机,完成其中的部分康复训练。
随着机器人技术的发展,小型化、轻量化而且更接近实用的人工智能机器人不断地被开发研制出来,人们对康复机器人的未来也充满了期待。
关键词:上肢;康复机器人;结构设计;运动机构;传动机构
ABSTRACT
Rehabilitation robot is a type of rehabilitation facilities, and as an important branch of medical robots at the same time, it comes from the rehabilitation medicine, biomechanics, mechanics, mechanics of machinery, electronics, material science, computer science and robotics, and many other areas, and it has become a research hotspot in the field of international robot. Medical Engineering in our country has been received widespread attention though, and because of rehabilitation robotics still in its infancy, some simple rehabilitation equipment is far from meeting intelligence, ergonomics of the rehabilitation robot needs, so we still need to do some further research and development.
From the use of perspective, the upper limb movement principle of the human body is analyzed. And the seated upper extremity rehabilitation robot is designed for the cardiovascular diseases or diseases of the nervous system on the body damage in patients with upper limb rehabilitation training. The design of upper limb rehabilitation robot is mainly composed of the fuselage, the motion mechanism and the transmission mechanism. The fuselage includes the platform base, two scalable columns and a beam; The motion mechanism consists of the back and forth various agency, the flex movement agency, the lifting agency and the wrist rotation agency, respectively installed on the base of the fuselage, the stand column and the beam, and the every movement is driven by the separate drive motor and reducer; The transmission mechanism is composed of the transmission shaft, screw nut pair and elements such as synchronous cog belt. The upper limb’s pendulum, expand and the rotation of the wrist of patients are realized by the robot under the control of the MCU. Part of the rehabilitation training also can be started by motor.
With the development of robot technology, miniaturization, lightweight and more close to practical robot of artificial intelligence are constantly developed, and people is full of expectation to the future of the rehabilitation robot.
Key words:upper limb; rehabilitation robot; structural design; motion mechanism; transmission mechanism
目 录
第1章 绪论 1
1.1 本课题的目的与意义 1
1.2 康复机器人的国内外研究现状 2
1.2.1 国外研究现状 2
1.2.2 国内研究现状 5
1.3 本课题主要研究内容 7
第2章 上肢康复机器人总体结构方案 8
2.1 总体方案设计 8
2.1.1 机器人整体尺寸的选择 8
2.1.2 机器人驱动装置的选择 8
2.1.3 机器人的总体方案 9
2.2 运动机构的总体设计 10
2.2.1 前后摆动机构 10
2.2.2 屈伸运动机构 10
2.2.3 分合运动机构 11
2.2.4 手腕转动机构 12
2.3本章小结 12
第3章 上肢康复机器人机械结构设计 13
3.1 前后摆动机构 13
3.1.1 电机的选择 13
3.1.2 减速器的选择 14
3.1.3 联轴器的选择 15
3.1.4 轴的设计与校核 16
3.1.5 键选择及校核计算 18
3.1.6 整体结构的设计 19
3.2 屈伸运动机构 20
3.2.1 电机的选择 20
3.2.2 联轴器的选择 21
3.2.3 丝杠的设计计算 21
3.2.4 锥齿轮的设计计算 23
3.2.5 轴承校核 25
3.2.6 总体结构的设计 26
3.3 分合运动机构 27
3.3.1 电机的选择 27
3.3.2 支撑座的设计 28
3.3.3 横梁的设计 29
3.3.4 同步齿形带设计 29
3.3.5 总体结构的设计 31
3.4 手腕转动机构 31
3.4.1 电机的选择 31
3.4.2 总体结构的设计 32
3.5 本章小结 33
第4章 总结 34
参考文献 35
致 谢 37