设计简介
摘要
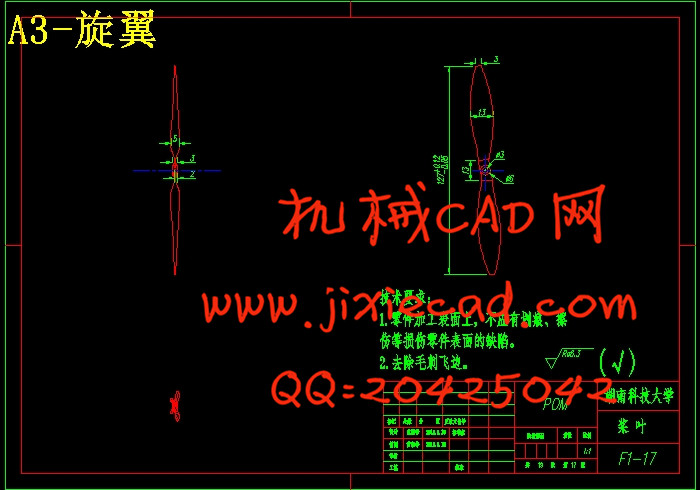
四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器是一种多旋翼飞行器。四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。该设计主要利用已有的相关技术,初步研究和设计四轴飞行器的飞行控制系统,并制作出1:1等比例模型。四轴飞行器采用四个旋翼,其飞行方式与直升机相比有较大的区别,可通过调节四个旋翼之间的速度来实现飞行姿态的切换,并以此来控制飞行速度。如此一来就不需要繁杂的桨矩控制部件,同时四个旋翼可以共享电路控制板以及电池等,简化了飞行器的结构,降低了能源的消耗。具有较高的研究价值和使用价值,可用于侦查监视、通信中继等。
本文围绕四轴飞行器进行了初步的分析和设计。首先在结构上对四轴飞行器进行了结构上的设计与加深,紧接着对四轴飞行器的空气动力学特性与四轴飞行器飞行姿态控制的力学原理进行了研究和分析,最后对四轴飞行器的控制系统和控制率进行了设计和分析。
关键词:四轴飞行器;飞行控制系统;旋翼;稳定架;应急装置
ABSTRACT
Quadrocopter, also known as four-rotor aircraft, four-rotor helicopter, called four-axis, four-rotor. Four simple mechanism axis propeller aircraft are the motor directly connected, cross-shaped layout allows the aircraft fuselage rotational force obtained by varying the motor speed to adjust their attitude.The design is mainly related to the use of existing technologies, preliminary research and design four-axis aircraft flight control system, and create a 1: 1 scale models. Quadrocopter uses four rotors, compared to its helicopter flight mode have a greater difference, by adjusting the speed of the four rotors to achieve flight attitude between switching, and also can control the flight speed. This way you do not need complicated collective pitch control components, while four rotor can share the circuit control board and batteries, simplifying the structure of the aircraft, reducing energy consumption. So,It has high research value and use value, can be used to detect surveillance, communications relay and so on.
This paper focuses on four axis aircraft conducted a preliminary analysis and design. First, the structure of the four-axis aircraft was designed and deepen structural, followed axis of the aerodynamic characteristics of the aircraft and aircraft mechanics axis attitude control conducted research and analysis, the final of four-axis aircraft control systems and control law were designed and analyzed.
Key words:Quadrocopter;Flight Control System;Rotor;Stable frame;Emergency equipment
目 录
第一章 概述………………………………………………………………… 1
1.1 前言…………………………………………………………………………1
1.2 四轴飞行器发展历史………………………………………………………1
1.3 飞行控制系统简介…………………………………………………………4
1.4 本论文主要研究问题………………………………………………………5
1.5 本章小结……………………………………………………………………6
第二章 四轴飞行器结构设计……………………………………………7
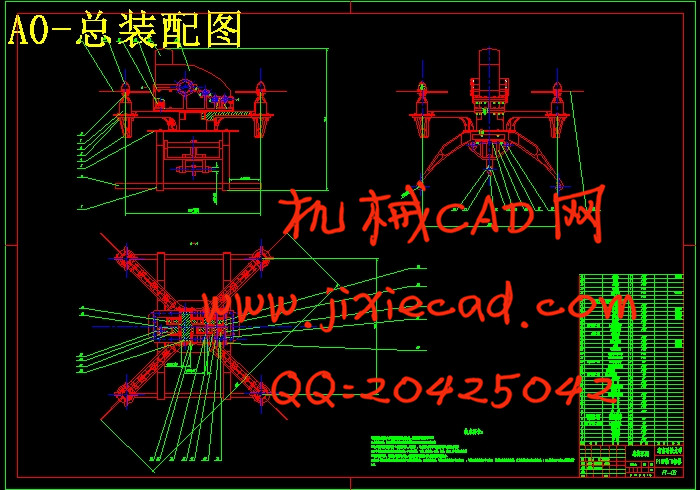
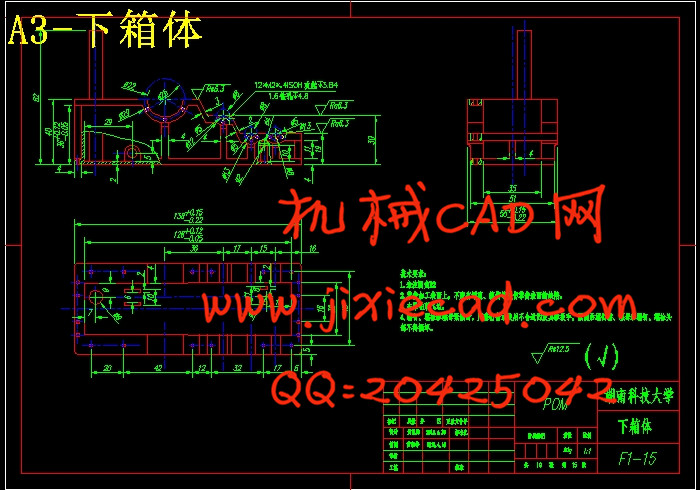
2.1总体结构设计方案…………………………………………………………7
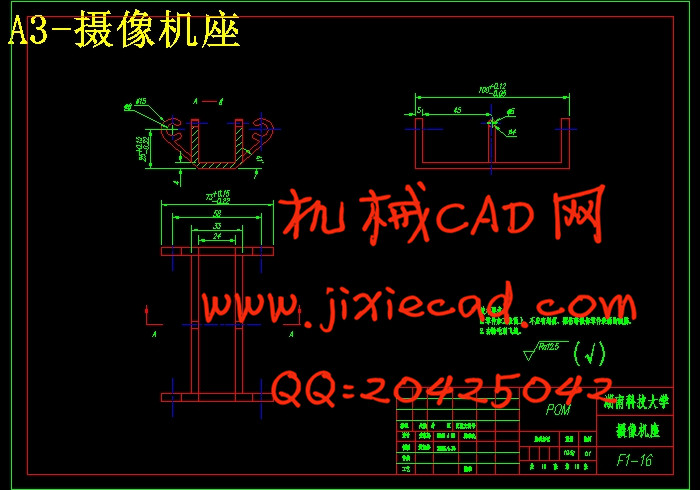
2.2摄像机架设计方案…………………………………………………………8
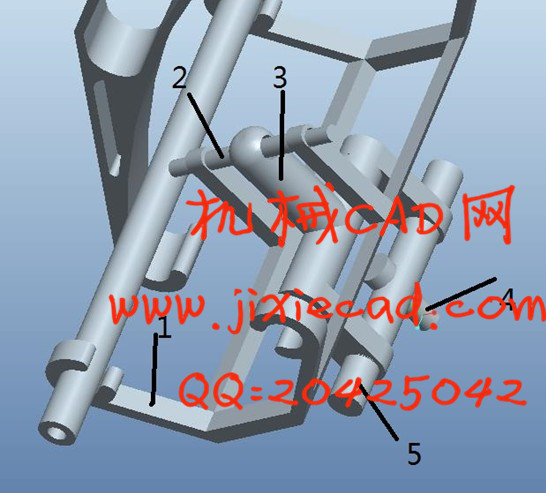
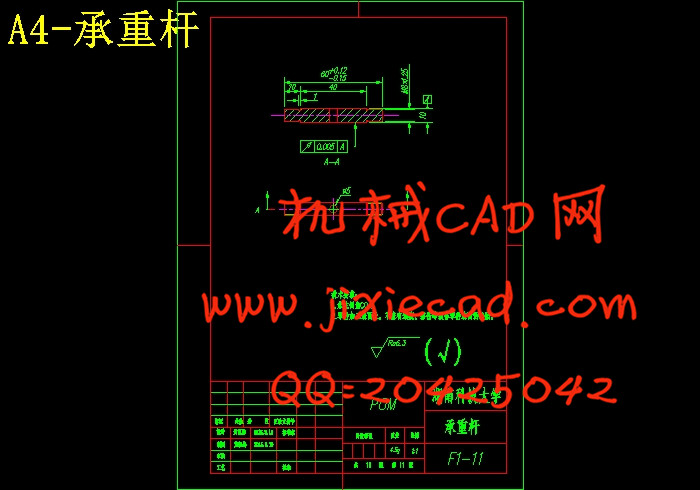
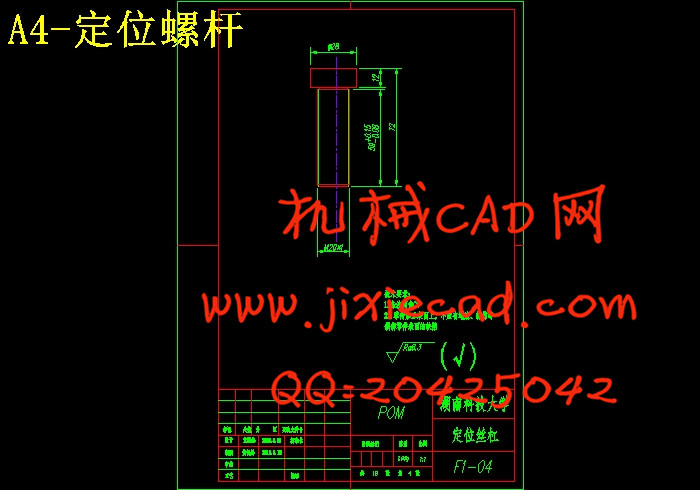
2.3应急降落装置设计方案……………………………………………………9
2.4本章小结 …………………………………………………………………11
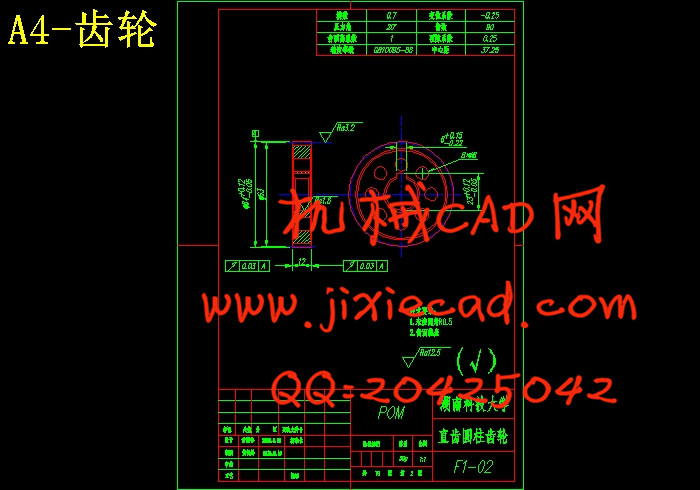
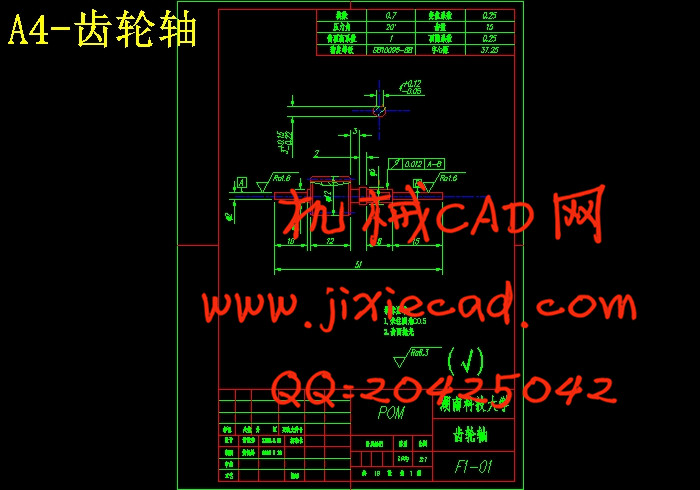
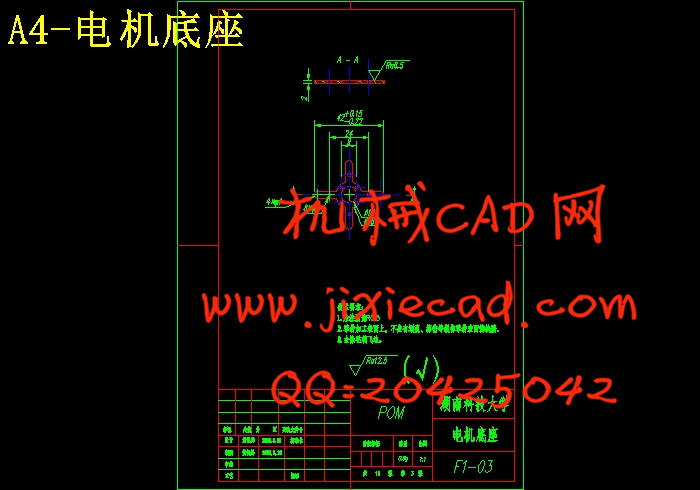
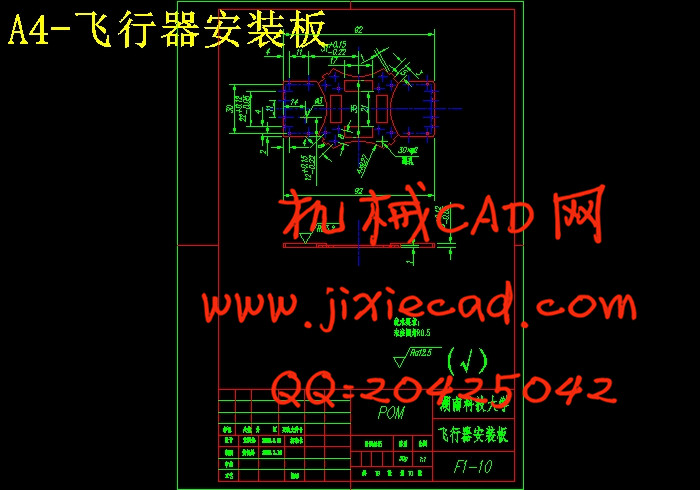
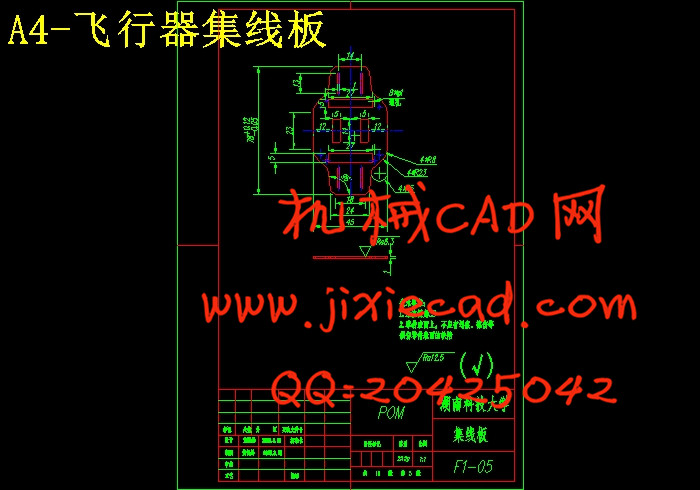
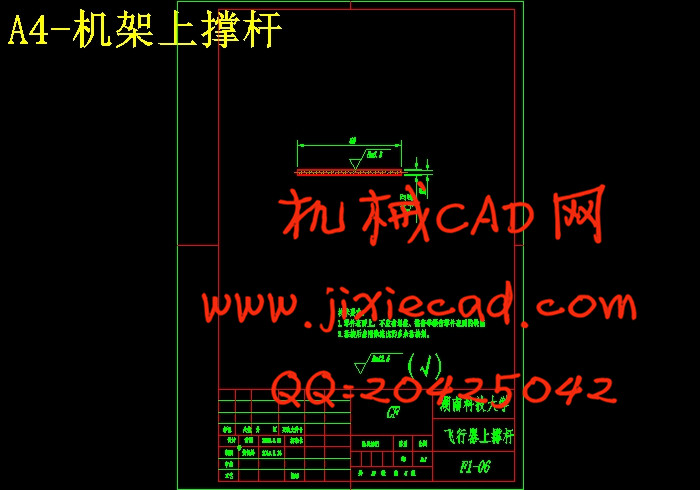
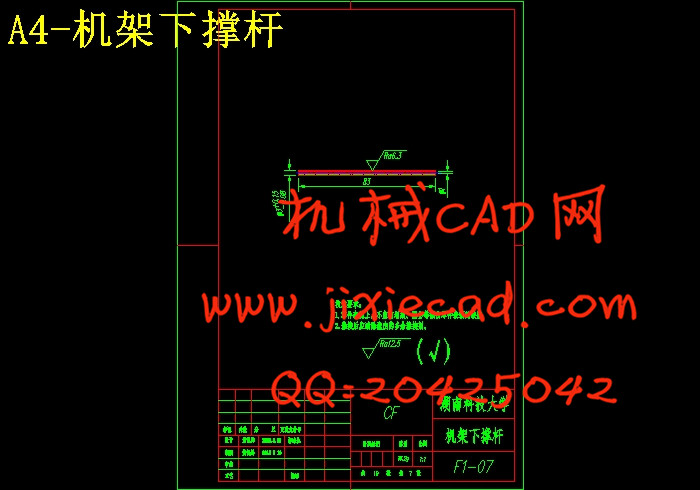
第三章 四轴飞行器零件设计……………………………………………12
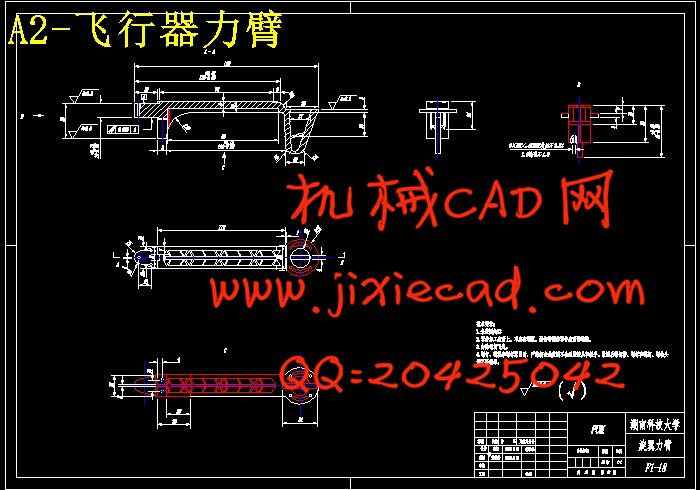
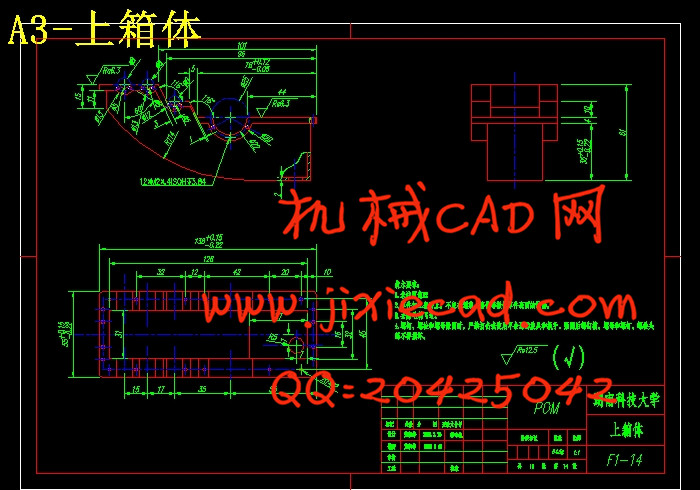
3.1机架零件设计 ……………………………………………………………12
3.2摄像机稳定座零件设计 …………………………………………………12
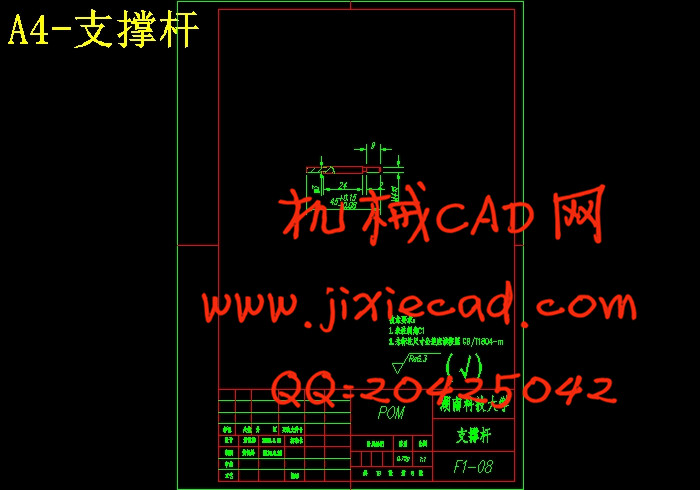
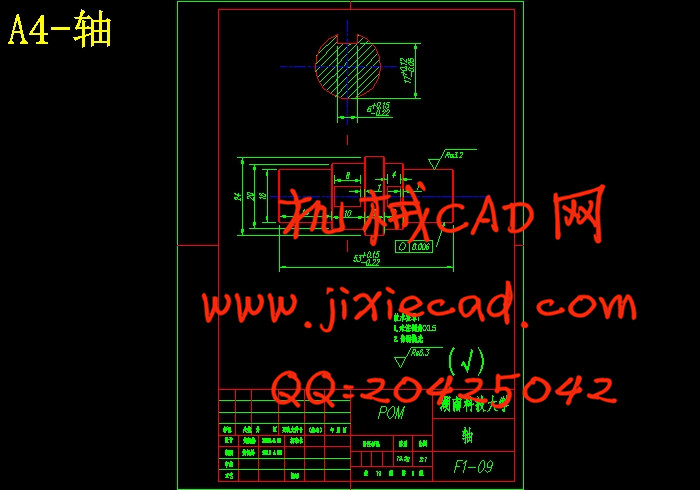
3.3应急降落装置零件设计 …………………………………………………12
3.4本章小结 …………………………………………………………………19
第四章 四轴飞行器力学分析……………………………………………20
4.1坐标系的建立 ……………………………………………………………20
4.2单个旋翼产生的力与力矩 ………………………………………………21
4.3机身所产生的力与力矩 …………………………………………………24
4.4飞行器所受合力与合力矩……………………………………………… 25
4.5 本章小结…………………………………………………………………25
第五章 四轴飞行器控制原理…………………………………………26
5.1四轴飞行器姿态控制原理 ………………………………………………26
5.2四轴飞行器姿态与升力的关系…………………………………………28
5.3本章小结…………………………………………………………………30
第六章 四轴飞行器控制实现……………………………………………………31
6.1控制律设计 ………………………………………………………………31
6.2总体设计 …………………………………………………………………35
6.3飞行控制板的选用 ………………………………………………………36
6.4 电机驱动模块的设计……………………………………………………38
6.5 遥控装置的选用…………………………………………………………38
6.6 电源装置的设计…………………………………………………………38
6.7 本章小结 …………………………………………………………………41
设计体会 …………………………………………………………………………………42
参考文献 ………………………………………………………………………44
致 谢……………………………………………………………………… 45