设计简介
摘 要
本设计属于人体组织工程载体框架制造工艺技术领域,其方法包括以下步骤:首先制备室温下含组织工程载体框架材料的液体和含生长因子的液体;根据用户的预先设计的路径,将上述两种液体在低于0℃的低温环境中分别通过不同的喷头挤出或喷射出来,逐层堆积成形为冷冻的多孔组织工程载体框架,然后在冻干机中冷冻干燥,去除溶剂后得到组织工程载体框架。
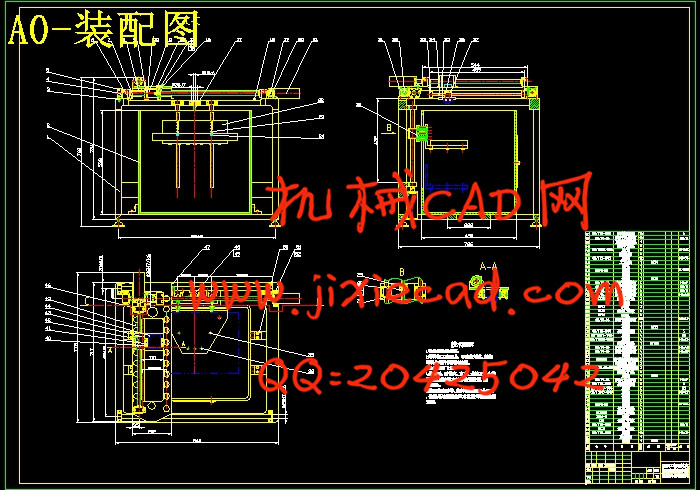
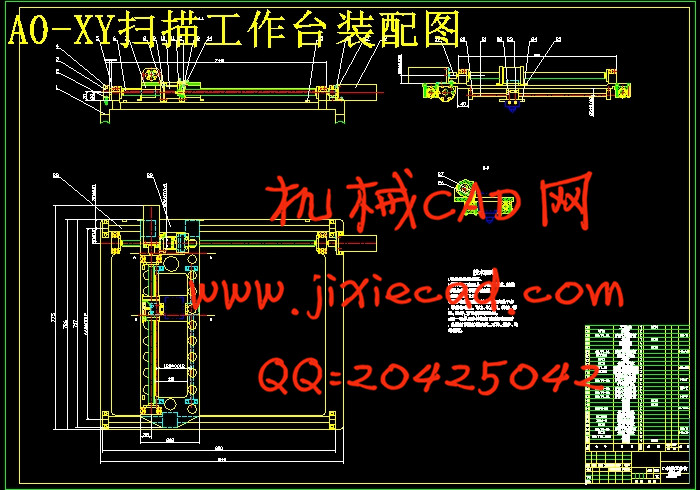
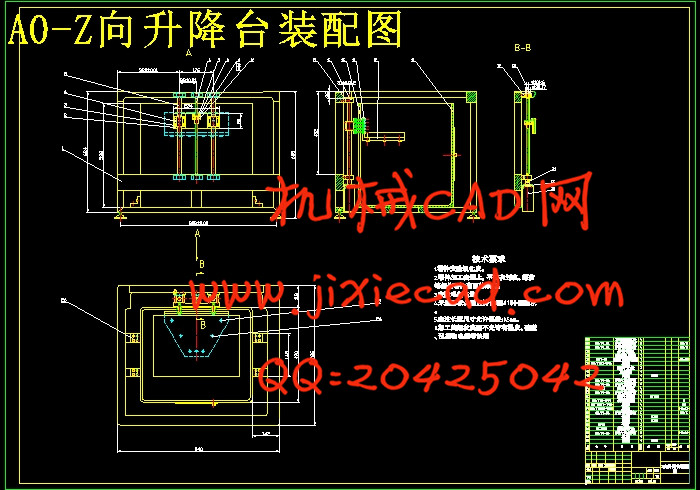
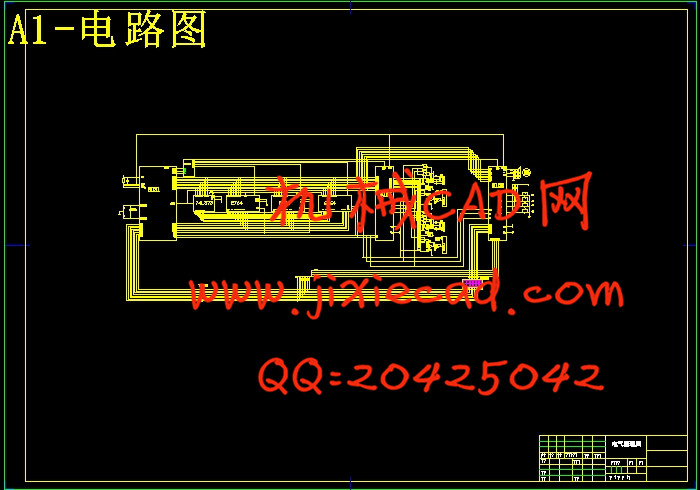
落实到本毕业设计的内容主要是X-Y扫描工作台,Z轴升降台以及整机布局的设计,电控部分的初步设计。X-Y向工作台采用光杠导向,伺服电机驱动,滚珠丝杠传动,Z向工作台通过光杠导向,步进电机驱动,丝杠螺母传动。电控部分主要包括8031单片机、I/ O 接口卡、D/A转换电路、功率放大电路、伺服电机、光电隔离电路、步进电机、测速发电机, 以及键盘、显示器等。
关键词:人体组织工程 快速成型技术 扫描工作台 单片机控制
Abstract
This design belongs to the field of the framework carrier manufacturing technology of human tissue engineering which includes several steps as followed. Firstly, prepare the liquid contained the material of the framework carrier of tissue engineering. Secondly, according to the user’s prescribed path,the two liquids were sprayed from two different nozzle below zero Centigrade, then the frozen porous tissue engineering carrier is deposited by layers. Finally, the framework can be obtained after sublimation drying of solvent in a freeze –drying apparatus.
The main contents of this paper is to design the X_Y scanning workbench、Z lifting workstation as well as their control units. Both of the X-Y workbench and the Z lifting workstation are guided by the lead bars. The X-Y workbench is transmitted with the ball screws and driven by servo motors. The Z lifting workstation is transmitted with the lead screws and driven by stepper motor. The control unit contains SCM, I/O interface card, photoelectric isolation circuit, D / A converter circuit, servo motors, stepper motor, tachogenerator, power amplifier, as well as keyboard, monitor, etc.
Keywords: human tissue engineering, RP technology, scanning workbench, SCM
第一章 综 述 1
1.1组织工程载体框架制备综述 1
1.2无加热沉积制造的设备与工艺 3
第二章 具体设计任务及时间安排 4
2.1工作台机械部分设计 4
2.2工作台电路部分设计 5
2.3设备附件部分设计 5
2.4设计日程安排 5
2.5设计要求参数 5
第三章 机械装置部分设计 6
3.1 X_Y方向工作台设计 6
3.1.1 X向导向机构 6
3.1.2 光杠与直线轴承 6
3.1.3 传动机构设计 6
3.1.4 滚珠丝杠副的设计计算 7
3.2 Z方向工作台设计相关设计计算 11
3.2.1 导向机构选择 11
3.2.2 电机选择 11
3.2.3传动副选择 12
3.2.4传动机构设计 12
3.2.5 Z向步进电机选择 13
3.2.6 联轴器选用 14
第四章 电气原理部分设计 15
4.1总体部分设计 15
4.2 电气部分基本组成 15
4.3 电气系统参数选择 15
4.4 单片机系统元件布置框图 18
4.5 伺服系统结构原理 19
4.6 接口电路及其原理 19
4.7 速度反馈输入接口 19
4.8 光电编码器及其接口 20
4.9 光电耦合器与步进电机 21
4.10 光电耦合器 21
4.11 步进电机及其软件环形分配器 22
总结与心得 23
总结 23
参考文献 24
本设计属于人体组织工程载体框架制造工艺技术领域,其方法包括以下步骤:首先制备室温下含组织工程载体框架材料的液体和含生长因子的液体;根据用户的预先设计的路径,将上述两种液体在低于0℃的低温环境中分别通过不同的喷头挤出或喷射出来,逐层堆积成形为冷冻的多孔组织工程载体框架,然后在冻干机中冷冻干燥,去除溶剂后得到组织工程载体框架。
落实到本毕业设计的内容主要是X-Y扫描工作台,Z轴升降台以及整机布局的设计,电控部分的初步设计。X-Y向工作台采用光杠导向,伺服电机驱动,滚珠丝杠传动,Z向工作台通过光杠导向,步进电机驱动,丝杠螺母传动。电控部分主要包括8031单片机、I/ O 接口卡、D/A转换电路、功率放大电路、伺服电机、光电隔离电路、步进电机、测速发电机, 以及键盘、显示器等。
关键词:人体组织工程 快速成型技术 扫描工作台 单片机控制
Abstract
This design belongs to the field of the framework carrier manufacturing technology of human tissue engineering which includes several steps as followed. Firstly, prepare the liquid contained the material of the framework carrier of tissue engineering. Secondly, according to the user’s prescribed path,the two liquids were sprayed from two different nozzle below zero Centigrade, then the frozen porous tissue engineering carrier is deposited by layers. Finally, the framework can be obtained after sublimation drying of solvent in a freeze –drying apparatus.
The main contents of this paper is to design the X_Y scanning workbench、Z lifting workstation as well as their control units. Both of the X-Y workbench and the Z lifting workstation are guided by the lead bars. The X-Y workbench is transmitted with the ball screws and driven by servo motors. The Z lifting workstation is transmitted with the lead screws and driven by stepper motor. The control unit contains SCM, I/O interface card, photoelectric isolation circuit, D / A converter circuit, servo motors, stepper motor, tachogenerator, power amplifier, as well as keyboard, monitor, etc.
Keywords: human tissue engineering, RP technology, scanning workbench, SCM
第一章 综 述 1
1.1组织工程载体框架制备综述 1
1.2无加热沉积制造的设备与工艺 3
第二章 具体设计任务及时间安排 4
2.1工作台机械部分设计 4
2.2工作台电路部分设计 5
2.3设备附件部分设计 5
2.4设计日程安排 5
2.5设计要求参数 5
第三章 机械装置部分设计 6
3.1 X_Y方向工作台设计 6
3.1.1 X向导向机构 6
3.1.2 光杠与直线轴承 6
3.1.3 传动机构设计 6
3.1.4 滚珠丝杠副的设计计算 7
3.2 Z方向工作台设计相关设计计算 11
3.2.1 导向机构选择 11
3.2.2 电机选择 11
3.2.3传动副选择 12
3.2.4传动机构设计 12
3.2.5 Z向步进电机选择 13
3.2.6 联轴器选用 14
第四章 电气原理部分设计 15
4.1总体部分设计 15
4.2 电气部分基本组成 15
4.3 电气系统参数选择 15
4.4 单片机系统元件布置框图 18
4.5 伺服系统结构原理 19
4.6 接口电路及其原理 19
4.7 速度反馈输入接口 19
4.8 光电编码器及其接口 20
4.9 光电耦合器与步进电机 21
4.10 光电耦合器 21
4.11 步进电机及其软件环形分配器 22
总结与心得 23
总结 23
参考文献 24