设计简介
目 录
1 引言………………………………………………………………………………… 1
1.1 选题的背景及意义……………………………………………………………… 1
1.2 虚拟建模系统的环境…………………………………………………………… 1
2 导杆机构的概念及其设计方法的主导思想……………………………………… 8
2.1 导杆机构设的概念……………………………………………………………… 8
2.2 导杆机构设计的基本问题……………………………………………………… 8
2.3 机械传动系统的方案设计………………………………………………………11
3 导杆减速装置的设计原理及参数的确定…………………………………………13
3.1 导杆减速装置的设计原理………………………………………………………13
3.2 导杆减速装置的参数确定………………………………………………………14
4 导杆减速装置三维模型的建立……………………………………………………21
4.1 Pro/E 软件实现建模功能的概述………………………………………………22
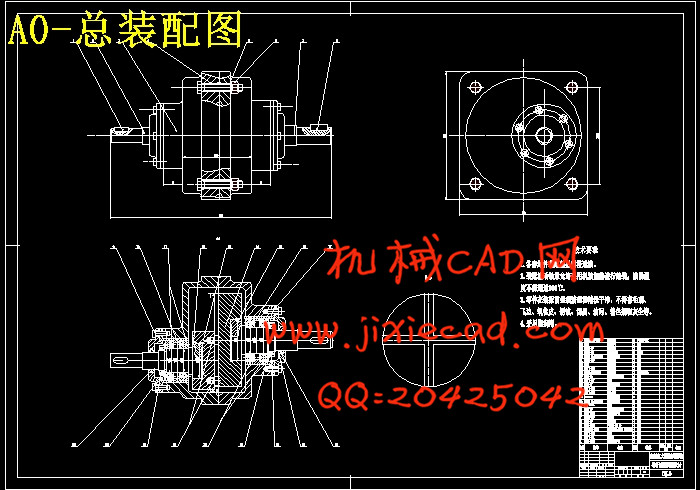
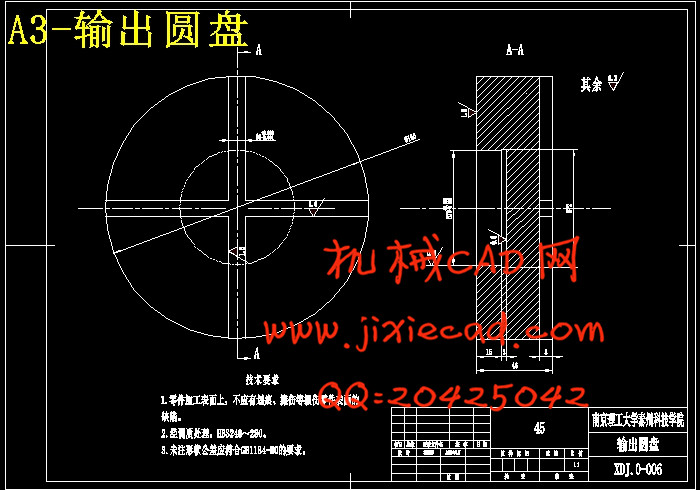
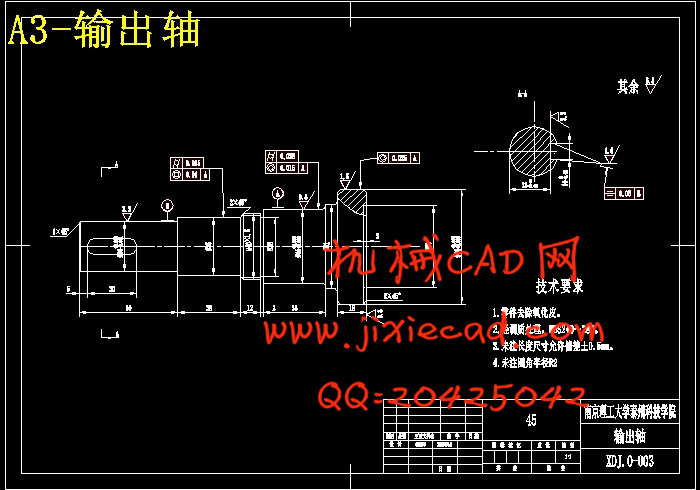
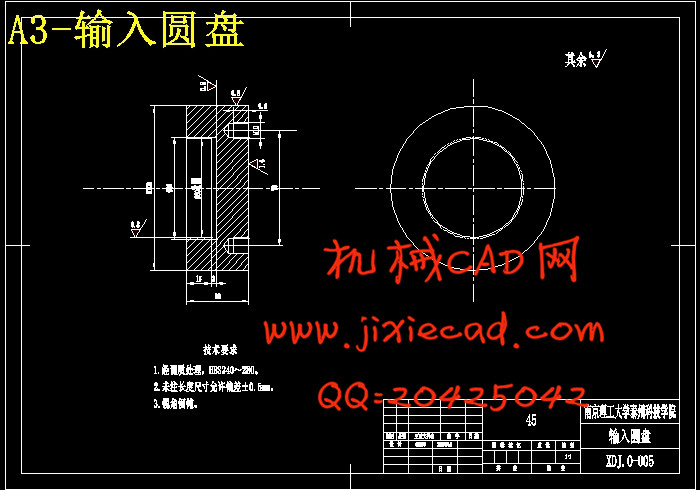
4.2 用Pro/E制作的导杆减速器的零件图及其总装配图…………………………23
5 导杆减速装置的运动仿真…………………………………………………………31
5.1 机构运动仿真的流程……………………………………………………………31
5.2 实现运动仿真的关键问题………………………………………………………33
结束语 …………………………………………………………………………………34
致谢 ……………………………………………………………………………………35
参考文献 ………………………………………………………………………………36
1 引言………………………………………………………………………………… 1
1.1 选题的背景及意义……………………………………………………………… 1
1.2 虚拟建模系统的环境…………………………………………………………… 1
2 导杆机构的概念及其设计方法的主导思想……………………………………… 8
2.1 导杆机构设的概念……………………………………………………………… 8
2.2 导杆机构设计的基本问题……………………………………………………… 8
2.3 机械传动系统的方案设计………………………………………………………11
3 导杆减速装置的设计原理及参数的确定…………………………………………13
3.1 导杆减速装置的设计原理………………………………………………………13
3.2 导杆减速装置的参数确定………………………………………………………14
4 导杆减速装置三维模型的建立……………………………………………………21
4.1 Pro/E 软件实现建模功能的概述………………………………………………22
4.2 用Pro/E制作的导杆减速器的零件图及其总装配图…………………………23
5 导杆减速装置的运动仿真…………………………………………………………31
5.1 机构运动仿真的流程……………………………………………………………31
5.2 实现运动仿真的关键问题………………………………………………………33
结束语 …………………………………………………………………………………34
致谢 ……………………………………………………………………………………35
参考文献 ………………………………………………………………………………36